К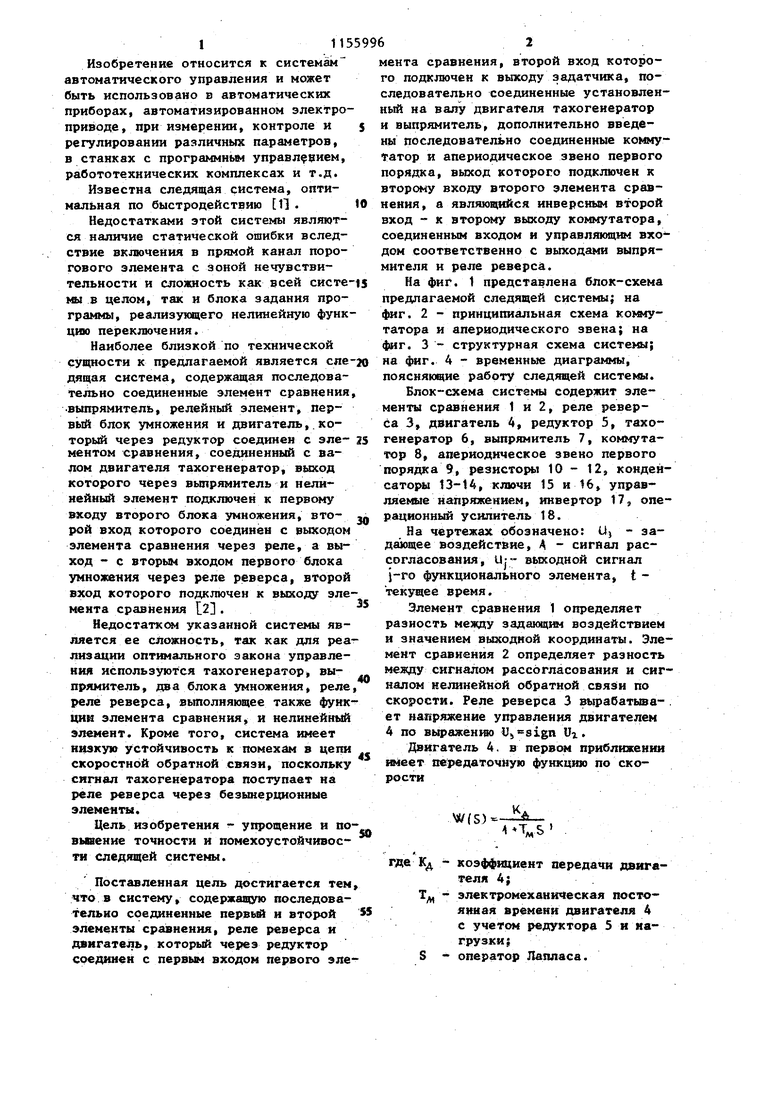

| название | год | авторы | номер документа |
|---|---|---|---|
| Следящая система | 1986 |
|
SU1472871A1 |
| Следящая система | 1979 |
|
SU862114A1 |
| Следящая система | 1978 |
|
SU763851A1 |
| Бесконтактный следящий привод постоянного тока | 1975 |
|
SU930241A1 |
| Следящая система | 1979 |
|
SU849133A2 |
| Следящий привод для компенсации ки-НЕМАТичЕСКиХ пОгРЕшНОСТЕй МЕХАНизМОВ | 1979 |
|
SU817959A1 |
| Следящая система | 1979 |
|
SU847275A1 |
| Бесконтактный следящий привод постоян-НОгО TOKA | 1979 |
|
SU853606A1 |
| Бесконтактный следящий привод постоянного тока,оптимальной по быстродействию | 1973 |
|
SU459761A1 |
| Бесконтактная следящая система постоянного тока | 1979 |
|
SU930238A2 |
СЛЕДЯЩАЯ СИСТЕМА, КВАЗЮПТИМАЛЬНАЯ ПО ШСТРОДЕЙСТВМО, содержащая последовательно соединенные первый и второй элемент сравнения, реле реверса и двигатель, который через редуктор соединен -с первьм входом первого элемента сравнения,второй вход которого подключен к выходу задатчика, последовательно соединенные установленный на валу двигателя тахогенератор и выпрямитель, отличающаяся тем, что, с целыо упрощения, повьшения точности и помехоуСтс чивости системы, она содержит последовательно соединенные коммутатор и апериодическое звено первого порядка, выход которого подключен к второму входу второго элемента сравнения, а являющийся инверсньм второй вход к второму выходу коммутатора, соединенного входом и управляющим входом соответственно с выходами выпрямителя и реле реверса.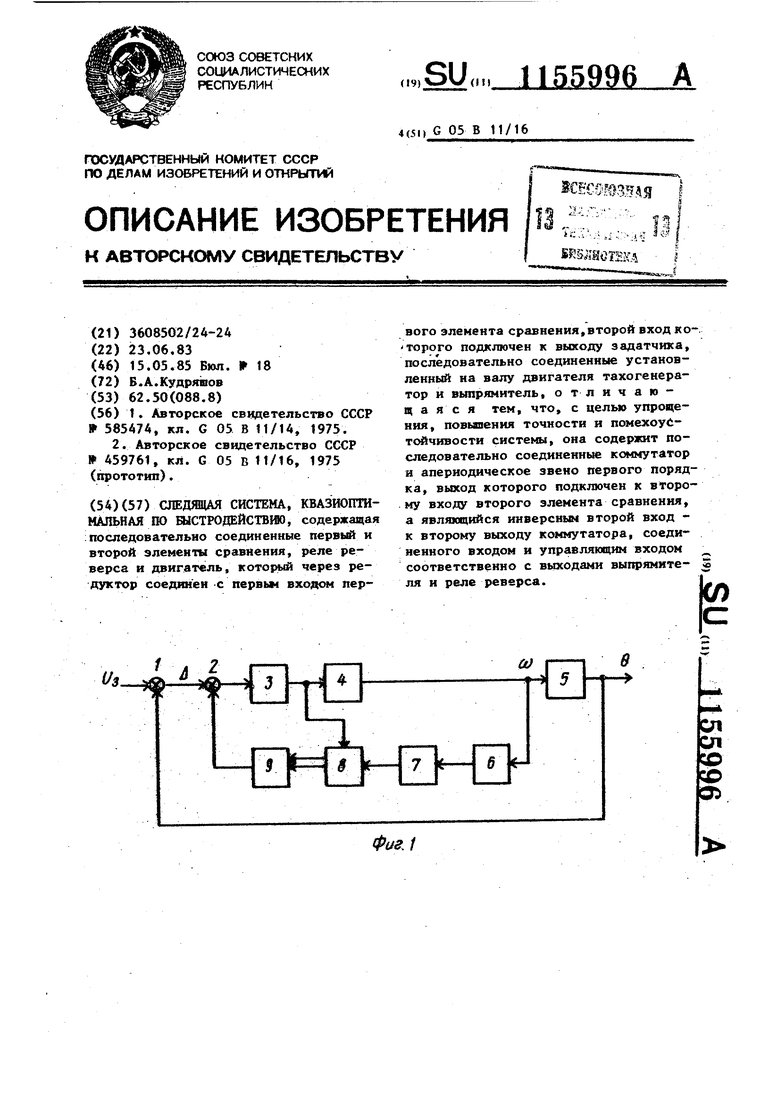
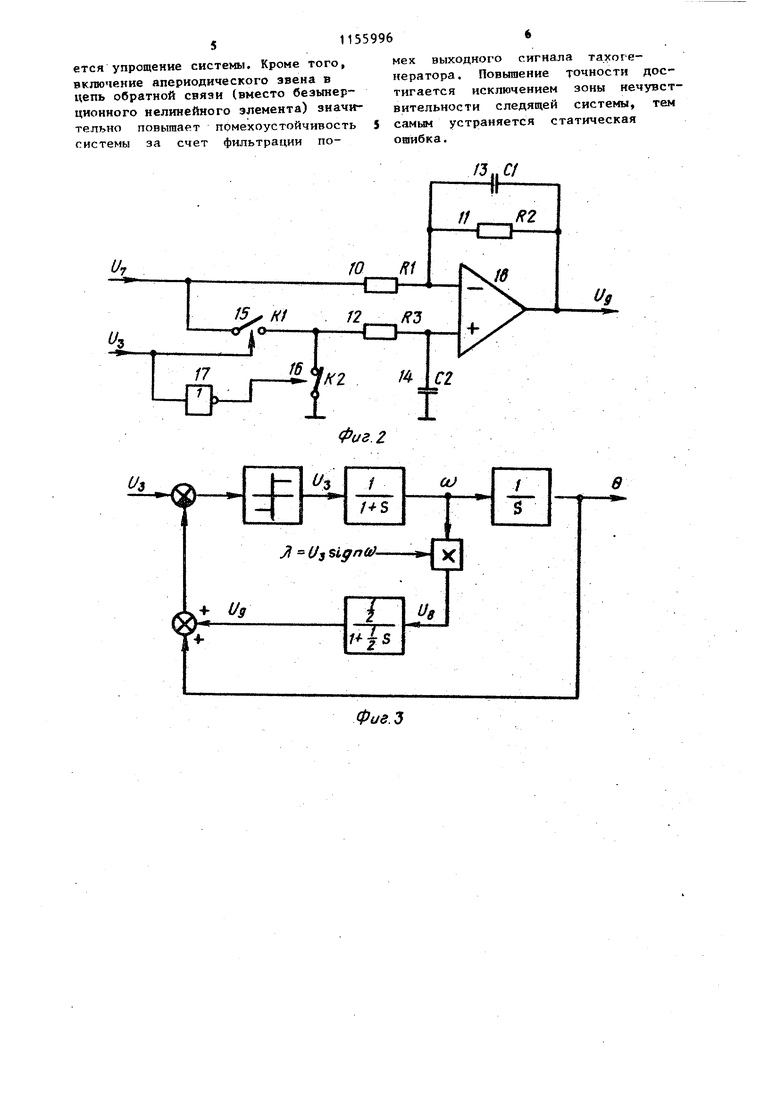
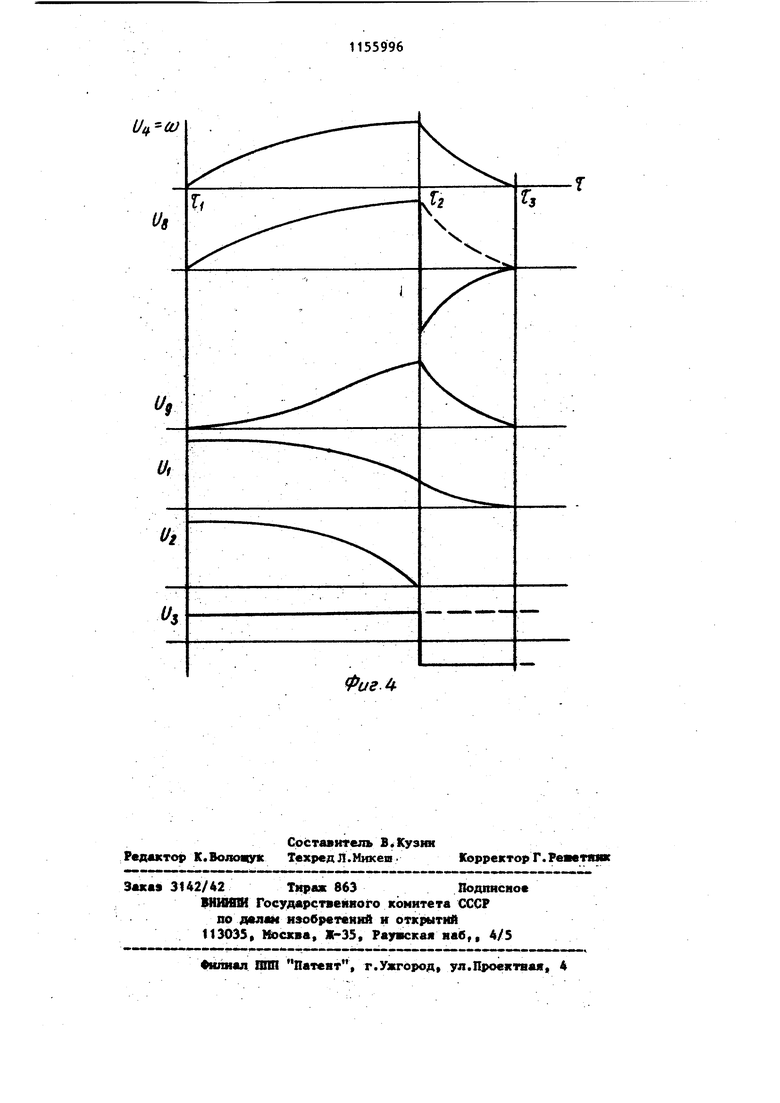
f/г / 115 Изобретение относится к системам автоматического управления и может быть использовано в автоматических приборах, автоматизированном электроприводе, при измерении, контроле и регулировании различных параметров, в станках с программньм управлением, работотехнических комплексах и т.д. Известна следящая система, оптимальная по быстродействию 11 . Недостатками этой системы являются наличие статической ошибки вследствие включения в прямой канал порогового элемента с зоной нечувствительности и сложность как всей систе мы в целом, так и блока задания программы, реализующего нелинейную функ цию переключения. Наиболее близкой по технической сущности к предлагаемой является cne дящая система, содержащая последовательно соединенные элемент сравнения выпрямитель, релейный элемент, первьй блок умножения и двигатель,.который через редуктор соединен с элементом сравнения, соединенный с валом двигателя тахогенератор, выход которого через вьшрямитель и нели нейный элемент подключен к первому входу второго блока умножения, второй вход которого соединен с выходом элемента сравнения через реле, а выход - с вторым входом первого блока умножекия через реле реверса, второй вход которого подключен к выходу эле мента сравнения 2. Недостатком указанной системы является ее сложность, так как для реа лизации оптимального закона управления используются тахогенератор, выпрямитель, даа блока умножения, реле реле реверса, вьтолнякщее также функ ции элемента сравнения, и нелинейный элемент. Кроме того, система имеет низкую устойчивость к помехам в цепи скоростной обратной связи, поскольку сигнал тахогенератора поступает на реле реверса через безынерхшонные элементы. Цель изобретения - упрощение и по вьваение точности и помехоустойчивости следящей системы. Поставленная цель достигается тем что в систему, содержащую последовательно соединенные первый и второй элементы сравнения, реле реверса и двигатель, который через редуктор соединен с первым входом первого эле 2 ента сравнения, второй вход которого подключен к выходу задатчшса, последовательно соединенные установленный на валу двигателя тахогенератор и выпрямитель, дополнительно введены последовательно соединенные коммутатор и апериодическое звено первого порядка, выход которого подключен к второму входу второго элемента срешнения, а являющийся инверсным второй вход - к второму выходу коммутатора, соединенным входом и управляющим входом соответственно с выходами выпрямителя и реле реверса. На фиг. 1 представлена блок-схема предлагаемой следящей системы; на фиг. 2 - принципиальная схема Koi e iyтатора и апериодического звена; на г. 3 - структурная схема системы; на фиг. 4 - временные диаграммы, поясняющие работу следящей системы. Блок-схема системы содержит элементы сравнения 1 и 2, реле реверса 3, двигатель 4, редуктор 5, тахогенератор 6, выпрямитель 7, коммутатор 8, апериодическое звено первого порядка 9, резисторы 10 - 12, конденсаторы 13-Н, ключи 15 и 16 управляемые напряжением, инвертор операционный усилитель 18. На чертежах обозначено: U) - задающее воздействие, А - сигнал рассогласования, Uj- выходной сигнал j-ro функционального элемента, tтекущее время. Элемент сравнения 1 определяет разность между задающим воздействием и значением выходной координаты. Элемент сравнения 2 определяет разность между сигналом рассогласования и сигналом нелинейной обратной связи по скорости. Реле реверса 3 вырабатыва- . ет напряжение управления двигателем 4 по выражен гао Ui. Двигатель 4. в первом приближении имеет передаточную функцию по скорости т„5 A коэффициент передачи двигателя 4; электромеханическая постоянная времени двигателя 4 с учетом редуктора 5 и нагрузки;оператор Лапласа. Коммутатор 8 и апериодическое зве но первого порядка 9 построены на ос нове операционного усилителя 18, .. инвертирующий вход которого соединен с первым входом коммутатора 8 через первый резистор 10, а со своим выходом и выходом апериодического эвена 9 - через паралельно соединенные второй резистор 11 и первый конденсатор .13, неинвертирующий же вход соединен с первым входом коммутатора 8 через последовательно соединенные третий резистор 12 и первый ключ 15, а с шиной корпуса - через второй кон денсатор 14, причем общая точка третьего резистора 12 и первого ключа 15 соединена с шиной корпуса через второй ключ 16; второй вход коммутатора 8 соединен с управлякяцими входа ми первого ключа 15 непосредственно, а второго ключа 16 - через инвертор 17. Величина емкости конденсаторов 13 и 14 выбираэтся одинаковой , величина сопротивлений резисторов 10 и 11 - также равной , а резистора 12 ,5 R1. Ключ 15 (16) замкнут если на его управляющий вход подан сигнал, равный 1, и разомкнут, если минус 1. Инвертор 17 реализует функдню U,;. « - и. Если ключ К1 замкнут (И) KJB04 К2 разомкнут, то передаточная функция к(в утатора 8 и апериодического звена 9 имеет вид /|ч W(S) U-,(S) где T C1-R1 выб1фается равной 0,5 Т/,. Если же ключ К1 разс 1киут (), ключ К2 разомкнут, то передаточная функция примет вид W(S) ; . U7(S) Формулш (1) и (2) можно записать одним выражением (с учетом значений Из) ,, Таким образсм устройство, принципиальная схема которого приведена на 40 5 50 55 фиг. 2, выполняет функции коммутатора 8 и апериодического звена первого порядка 9. Следящая система в цепом имеет структурную схему, приведенную на фиг. 3. Сигнал управления U в предлагаемой следящей системе определяется выражениемU5 L1-- (U3-©) где 0 и СХ) - значения регулируемой координаты и ее скорости. Система работает следующим образом. Пусть в исходном состоянии система находится в режиме высокочастотных колебаний вблизи положения равновесия (амплитуда и частота этих колебаний определяется малыми постоянными времени звеньев следящей системы) . На вход системы поступает ступенчатое задающее воздействие ( в момент временив,. На вход двигателя 4 с выхода реле реверса 3 подается управляющий сигнал и начинается разгон двигателя по закону . Выходной сигнал тахогенератора 6, пропорциональный v, через выпрямитель 7 и коммутатор 8 поступает на вход апериодического звена 9, на выходе которого формируется сигнал и, При зтом сигнал U2 и,.-0 - l-t4) на входе реле реверса 3, уменьшаясь, остается положительным. В момент времени сигнал становится равным нулю и система переходит в скользящий режим, при котором скорость двигателя 4 уменьшается. Среднее значение , и движение происходит по зако о ну 0 из-2 ) близкому к оптимальному. В момент времени tj система приходит в согласованное состояние, и вновь начинается режим высокочастотных автоколебаний вблизи положения равновесия. Таким образом, предлагаемая следящая система, квазиоптю альндя по быстродействию, строится.на основе апериодического звена первого порядка, включаемого в цепь обратной связи по скорости двигателя чем и достига15 1155996
ется упрощение системы. Кроме того,мех выходного сигнала тахогевключение апериодического эвена внератора. Повышение точности досцепь обратной связи (вместо безынер-тигается исключением зоиы нечувстционного нелинейного элемента) значи-витальности следящей системы, тем
тельно попытает прмехоустойчивость5 самым устраняется статическая
системы за счет фильтрации по-ошибка.
Фаа.З
Фиг
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Следящая система | 1975 |
|
SU585474A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Бесконтактный следящий привод постоянного тока,оптимальной по быстродействию | 1973 |
|
SU459761A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
