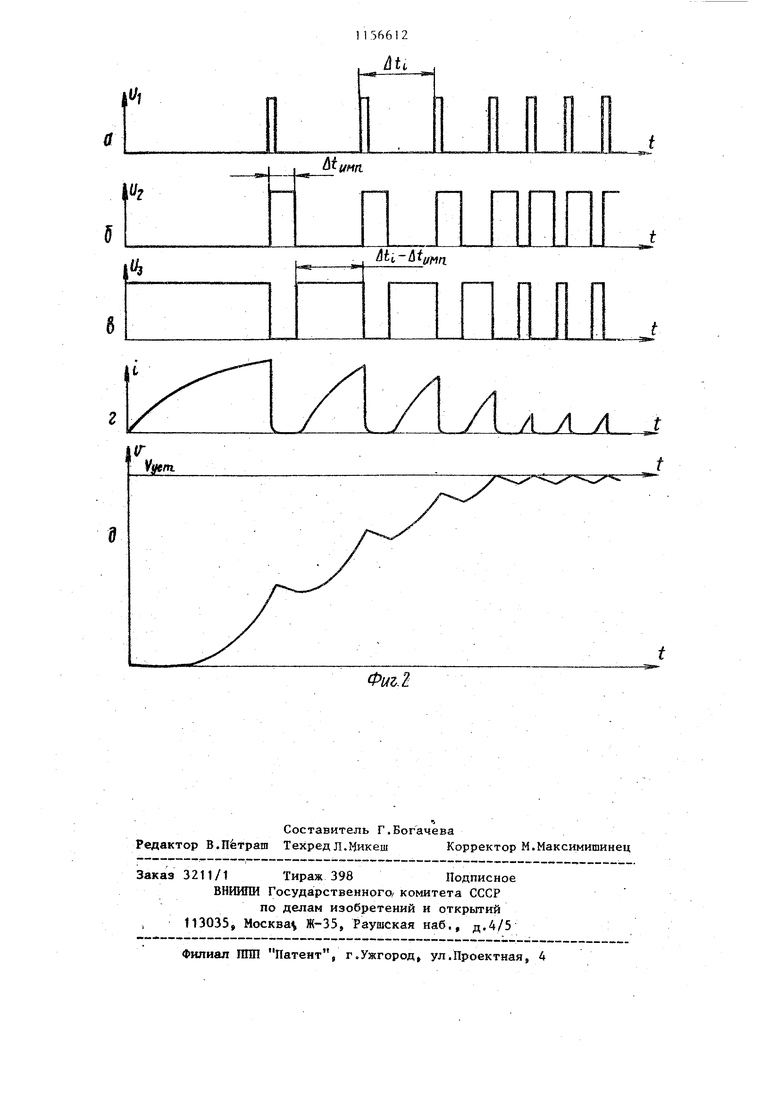
Фцг.{ Изобретение относится к автоматизации обработки рыбы и может быть использовано в рыбообрабатывающих машинах Для автоматического управления рабочими органами в зависимости от размеров рыбы, а также в робототехнических средствах рыбообрабатыва ющих производств. Известно устройство для автоматического управления процессом настрой ки рабочих органов рыбообрабатывающе машины, содержащее приспособление для измерения размера рыбы и датчик перемещения якоря электромагнита .исполнительного механизма, соединенные с блоком управления, выход которого подключен через усилитель к исполнительному механизму 1j . Недостатком известного устройства является то, что в процессе его рабо ты происхрдит износ уплотнений демпфера и изменение их свойств при коле баниях температуры, что приводит к снижению точности регулирования. Цель изобретения - повышение томности. Указанная цель достигается тем, что устройство для автоматического управления процессом настройки рабочих Органов рыбообработьшающий машины содержащее приспособление для измерения размера рыбы и датчик перемещ ния якоря электромагнита исполнител ного механизма, соединенные с блоком управления, выход которого подключе через усилитель к исполнительному механизму, снабжено одновибратором, вход которого связан с датчиком перемещения якоря электромагнита исполнительного механизма, а выход с усилителем, На фиг, 1 изображена схема устрой ства; на фиг, 2 временные диаграм мы процесса регулирования скорости перемещения якоря электромагнита. Устройство для автоматического управления процессом настройки рабо чих органов рыбообрабатывающей мащи ны содержит приспособление 1 для из мерения размера рыбы, исполнительный механизм, привод которого выполнен в виде электромагнита с якорем 2, датчик 3 перемещения якоря, электромагниты исполнительного механизма, блок 4 управления величиной перемеще ния, усилитель 5 и одновибратор 6. Якорь 2 электромагнита жестко соединен со щтоком 7 и снабжен возвратной пружиной 8. Обмотка 9 электромагнита соединена с выходом усилителя 5. Корпус 10 электромагнита и упор 11 закреплены на одном основании. Гильза 12, выполненная из немагнитного материала, является направляющей якоря 2, Блок 4 управления предназначен для управления величиной перемещения якоря 2 в Соответствии с сигналом, поступающим на задающий вход блока с выхода приспособления 1, и содержащим информацию о размерах рыбы, подлежащей разделке в, рыборазделочной машине. Усилитель 5 подключен между блоком 4 управления и электромагнитом и снабжен дополнительным входом, соединенным с выходом одновибратора 6 и осуществляющим логическую функцию Запрет по отношению к основному входу, . Вход одновибратора 6 соединен с выходом датчика 3. На фиг. 2 представлены временные диаграммы импульсов датчика поступательного перемещения якоря (ct); импульсов одновибратора (3); напряжения питанияобмотки электромагнита (Ь); тока в обмотке электромагнита (г.); скорости перемещения якоря (д)„ Устройство работает следующим образом. При поступлении сигнала с блока 4 управления на вход усилителя 5 на обмотку 9 электромагнита подается питание и якорь 2 под действием магнитного поля обмотки перемещается влево. По мере поступательного перемещения якоря 2 с выхода датчика 3 перемещения якоря электромагнита исполнительного механизма на вход одновибратора 6 поступает ряд последовательных импульсов. Датчик 3 настроен таким образом, что импульсы поступают при перемещении якоря 2 на заранее определенные последовательные отрезки пути. Интервалы времени Д1; между импульсами зависят от скорости перемещения якоря и тем меньше, чем / больще эта скорость. При поступлении каждого импульса одновибратор 6 вырабатывает импульс заданной длительности ut, (фиг.2(),| который с выхода одновибратора 6 по.ступает на запрещающий вход усилителя 5. В результате этого подача напряжения питания на обмотку 9 SJICKTромагнита прерывается на интервал Л -импТаким образом, в течение интервалов времени между импульсами одновиб ратора 6, равных at; - , , к обмотке 9 приложено напряжение питания (фиг. 20), скорость якоря 2 при этом возрастает (фиг. 2д), а в течение интерва;лов At ((ц;, , когда напряже;ние питания на обмотку 9 не подается, якорь 2 продолжает двигаться по инер ции и скорость его снижается на неко торую величину за. счет сил сопротивления (сил и противодействия пружины 8). В начале движения якоря 2 интервалы времени aij и dt &,Н1П сравнительно велики и приращение скорости . за время at - , больше, чем сниже ние скорости за время atj . В результате средняя за интервал времени at скорость перемещения якоря 2 постепе но от интервала к интервалу возрастает. При этом по мере возрастания скорости уменьшаются интервалы Л1 , flt - д1,,р и соответствукидие этим интервалам приращения скорости. Когда приращение скорости становится равным снижению скорости в течение интервал времени ,, средняя скорость дости гает установившегося значения 1 (фиг. 2,4). В результате осуществляется автоматическое регулирование скорости движения якоря 2. Ток в обмотке элект ромагнита (фиг. 2г) в течение интервала времени it,- й1ц/ип возрастает по экспоненциальному закону в соответствии с постоянной времени обмотки электромагнита. Причем при изменении величины интервала it, ,-|уменьшавтся не только длительность импульса тока, но и его максимальная;величина, В результате сила тяги электромагня-, та резко изменяется при незначительном изменении скорости. Такая сильная зависимость тяги от скорости обеспечивает малую зависимость установившейся скорости перемещения якоря электромагнита и соответственно .рабочих органов при изменении сил сопротивления. Таким образом, скорость перемещения рабочих органов мало зависит от размеров рыбы, коэффициента трения рыбы и силы противодействия пружины. Когда величина поступательного перемещения якоря 2 достигнет необходимого значения (например, величины соответствующего размера рыбы), подача сигнал с выхода блока 4 прекращается, усилитель 5 отключает питание обмотки 9 электромагнита и якорь 2 под действием пружины 8 возвращается в исходное положение. Величина определяется длительностью импульса , и при необходимости может иэменятьсй по программе. Предлагаемое устройство позвопяет увеличить точность настройки рабочих органов рыбообрабатывающей ма1а1ны, за счет чего обеспечивается экономия сырья до 7/.
л
/L У1 Л f
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического управления процессом настройки рабочих органов рыборазделочной машины | 1976 |
|
SU738576A1 |
| Способ управления рабочими органами рыбообрабатывающей машины и устройство для его осуществления | 1976 |
|
SU638239A1 |
| Устройство для широтно-импульсного управления электромагнитом | 1982 |
|
SU1084730A1 |
| Устройство для настройки рабочего органа однооперационной рыборазделочной машины | 1974 |
|
SU613748A1 |
| УСТРОЙСТВО ПЕРЕДАЧИ И ПРИЕМА ИНФОРМАЦИИ ПО ДВУХПРОВОДНОЙ ЛИНИИ СВЯЗИ | 1991 |
|
RU2022369C1 |
| Электронное управляющее устройство с исполнительными элементами рыбообрабатывающей машины | 1987 |
|
SU1716945A3 |
| РЕГУЛЯТОР ПРЯДЕНИЯ | 1973 |
|
SU370290A1 |
| Устройство для автоматической настройки рабочих органов рыборазделочной машины | 1975 |
|
SU659125A1 |
| Устройство для диагностирования колодочного тормоза с электромагнитным приводом | 1989 |
|
SU1749573A1 |
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ ЭЛЕКТРОМАГНИТНЫМ ДВИГАТЕЛЕМ (ВАРИАНТЫ) | 1997 |
|
RU2143761C1 |
УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПРОЦЕССОМ НАСТРОЙКИ РАБОЧИХ ОРГАНОВ РЫБООБРАБАТЫВАЮЩЕЙ 12 9 10 МАШИНЫ, содержащее приспособление для измерения размера рыбы и датчик перемещения якоря электромагнита исполнительного механизма, соединенные с блоком управления, выход которого подключен через усилитель к исполнительному механизму, отличающееся тем, что, с целью повышения точности, оно снабжено одновибратором, вход которого связан с датчиком перемещения якрря электромагнита исполнительного механизма, а выход - с усилителем. (Л с
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для автоматического управления процессом настройки рабочих органов рыборазделочной машины | 1976 |
|
SU738576A1 |
| Машина для добывания торфа и т.п. | 1922 |
|
SU22A1 |
