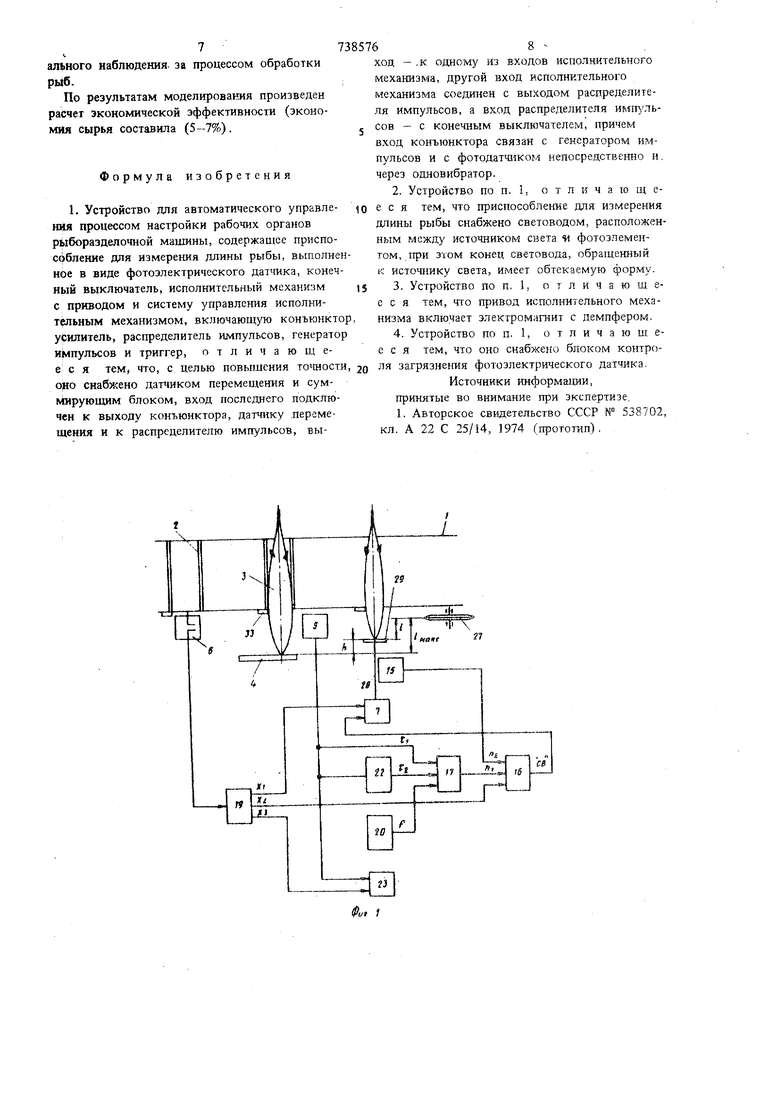
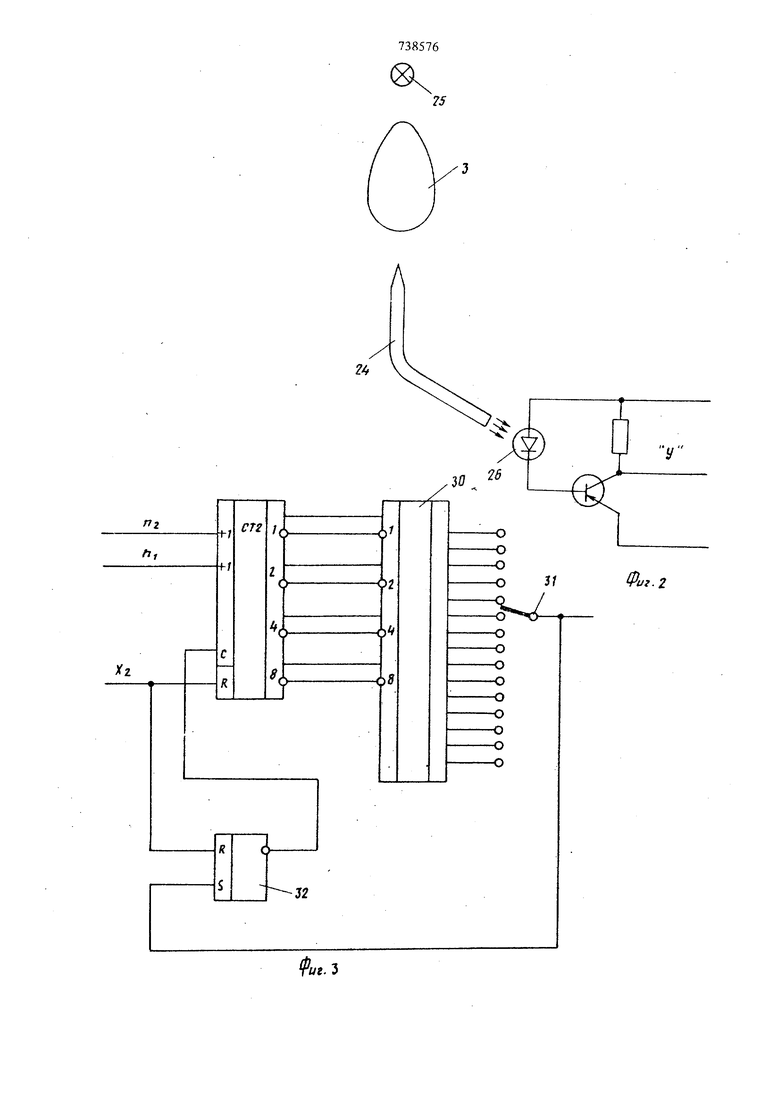
фотоэлектрический датчик с обмеряемой рыбой; на фиг. 3 - схема суммирующего блока; на фиг, 4 - исполнительный механизм; На фиг. 5 - схема блока контроля загрязнения фотоэлектрического датчика. Устройство состоит из транспортера 1, снаб женного лотками 2 для транспортирования рыб 3, упорной планки 4 для предварительной выставки рыб, приспособления для измерения длины рыбы, выполненного в виде фотоэлектрического датчика 5, конечного Выключателя 6, исполнительного механизма 7 С приводом, содержащим электромагнит с демпфером, включающих обмотку 8, сердечник 9, цилиндр 10 с дроссельным отверстием 11 и поршень 12, возвратную пружину 13 н упор 14. Устройство также содержит систему управления исполнительным мехайизмом, включающую датчик 15 перемещения, суммирую: ций блок 16, конъюнктор 17, усилитель 18, распределитель 19 импульсов, генератор 20 импульсов и триггер 21, при этом вход блока 16 подключен к выходу конъюнктора 17, Датчику 15 и к распределителю 19, выход к одному из входов механизма 7, другой вход которого соединен с выходом распределителя 19, а вход последнего - с выключателем 6, причем вход конъюнктора 17 связан с генератором 20 и с датчиком 5 непосредственно и через одновибратор 22. Кроме того, устройство содержит блок 23 контроля загрязнения фотоэлектрического датчика, а приспособление для измерения длины рыбы снабжено световодом 24, расположенным между источником 25 света и фотоэлементом 26, при этом конец световода 24, обращенны к источнику света, имеет обтекаемую форму : Устройство работает следующим образом. Рыбу 3 укладывают в лотки 2 транспорте ра 1 брюшком вверх, упирая головой в: пла ку 4, и транспортируют мимо датчика 5 в направлении ножа 27. Планка 4 предваритель но для каждой партии рыб устанавливается На расстоянии плоскости ножа 27, рав ном по предварительной оценке длины голов наибольшей рыбы в обрабатываемой партии. При движении рыбы мимо датчика 5 она телом перекрывает световой поток, идущий от источника 25 к световоду 24, сопротивле ние фотоэлемента 26 резко возрастает, транзистор запирается и на выходе появляется сигнал у в виде импульса, длительность которого ft| пропорциональна толщине рыбы и равна: от .вгде V- скорость движения транспортера; В - толщина рыбы. 4 Импульс /ц своим передним фронтом запускает одновибратор 22 к от последнего на инверсный вход конъюнктора 17 поступает импульс, длительность которого предварительно настроена равной: rtv Ч v где толщина наиме{п щей по ориентировочной оценке рыбы в обрабатываемой партии. С выхода генератора 20 на вход конъюнктора 17 поступают импульсы с частотой следования -f . В результате с выхода этого конъюнктора на вход блока 16 поступают импульсы, количество которых равно: . )() Импульсы поступают на счетный вход счетчика и количество их запоминается счетчиком. Далее рыба транспортируется к толкателю 28, который в зто время находится в исходном положении. Исходное положение площадки 29 перед обработкой каждой партии рыб устанавливают так, что она находится на одной линии с планкой 4. При транспортировании рыбы мимо площадки 29 механизма 7 на его вход с выхода распределителя 19 поступает импульс Х. Импульс X J поступает на S -вход триггера 21 и устанавливает его в состояние 1, с выхода этого триггера подается сигнал на вход усилителя 18 и с выхода последнего в обмотку 8 поступает ток, сердечник 9 втягивается в катущку, перемещая толкатель 28 в направлении, указанном стрелкой а. При этом площадка 29 сдвигает рыбу в лотке в направлении, перпендикулярном плоскости ножа 27. Совместно с толкателем 28 перемещается порщень 12, вытесняя воздух из цилинщ)а 10 через отверстие 11. Скорость движения всего узла сердечник-толкатель-порщень ограничивается скоростью истечения воздуха через отверстие 11, Диаметр этого отверстия выбран таким, чтобы перемеще|ше рыбы толкателем 28 было достаточно плавным. При движении толкателя 28 с выхода датчика 15 на вход блока 16 поступают импульсы, количество которь1х дэавно: h гдй ; где h- пepe leщeииe толкателя; ЛЬ щаг датчика, т.е. перемещение толкателя, соответствующее одному импульсу. В блоке 16 импульсы поступают на счетный вход счетчика и суммируются с поступивптим ранее числом импульсов п Информация о числе импульсов, поступивших в счетчик, передается в параллельном двоичном коде на входы дешифратора 30 и на выходе последнего, соответствующем этом числу в десятичном изображении, появляется сигнал. Когда перемещение толкателя 28 достигнет величины, при которой сумма импул сов П,+ п -f п. ,(5) где Hi - число, соответствующее выходу дешифратора 30, к которому подключен пер ключатель 31, сигнал с этого выхода (сигнал возврата ев) поступит на вход механизма 7. Сигнал ев поступит на R -вход триггера 21 и установит его в состояние О, сигнал на входе усилителя 18 исчезнет и ток в обмотке 8 прекратится. Одновременно сигнал ев поступит на S -вход триггера 32 и установит его в состояние 1. В результа те сигнал на С-входе счетчика исчезнет и счет импульсов прекратится. Вследствие прекращения тока в обмотке 8 толкатель 28 прекратит сдвиг рыбы и под действием пружины 13 возвратится в исходное положение до упора 14. Вследствие плавности движения толкателя 28, которая обеспечивается конструкцией механизма 7, сдвиг рыбы осущест вляется с высокой точностью. ; После возврата толкателя 28 в исходное положение на R -входы счетчика и триггера 32 от распределителя 19 поступает импульс Хр, устанавливающий их в состояние О. В результате движений толкателя 28 рыба сдвигается на величину Н п д h Поскольку планка 4 установлена на расстоянии ,( от плоскости ножа 27, то для выставления головы каждой рыбы относитель но этого ножа необходимо, чтобьг Для обеспечения этого необходимо перед обработкой каждой партии рыбы произвести настройку генератора 20 и блока 16, частоту следования импульсов этого генератора установить равной: i где А, - коэффициент пропорциональности, а переключатель 31 подключить к выходу дешифратора 30, соответствующему числу П а -1м«5Ь11л 1й. . , . . (9) ЛИ где 6, - длина головы наименьшей по ориентировочной оценке рыбы в обрабатываемой партии. Сдвинутая на величину ,,, . Рыба транспортируется к ножу 27, который удаляет голову. 766 При движении транспортера 1 выступы 33 замыкают контакты выключателя 6 и на вход распределителя 19 поступает импульс, осуществляющий синхронизацию работы этого распределителя с движением транспортера 1. Блок 23 осуществляет контроль наличия загрязнений на конце световода 24. Вследствие обтекаемой формы конца этого световода, обращенного к источнику 25, стекающие с рыб и деталей маишны загрязнения не удерживаются на нем, что значительно повышает устойчивость работы датчика 5. Однако случайные загрязнения конца световода 24 могут периодически иметь место. При загрязнении конца световода сигнал у на выходе датчика 5 будет существовать независимо от наличия рыбы между осветителем и световодом 24. Сигнал у поступает на вход конъюнктора 34. На второй вход этого конъюнктора поступает импульс Х от распределителя 19 На вход усилителя 35 направляется сигнал от конъюнктора 34, в результате чего загорается лампа 36, сигнализируя о наличии эагрязнеНИИ. Наличие синхронизирующей связи работы распределителя 19 с движением транспортера 1 обеспечивает приход импульса Х, в то время, когда в зоне датчика 5 находится промежуток между рыбами, уложенными в лотки 2. Поэтому при отсутствии загрязнений сигнал у в момент прихода импульса Х, отсутствует и лампа 36 не загорается. Сущность изобретения не изменится, если между счетчиком и дешифратором 30 включить второй двоичный счетчик, образующий с первым счетчиком регистр сдвига. Это позволит еще больще повысить производительность устройства за счет совмещения во времени перемещения рыбы толкателем 28 с обмером последующей рыбы датчиком 5. В этом варианте импульсы, образующиеся в результате обмера рыбы, поступают в первый счетчик. По окончании обмера число импульсов п, перезасчитывается во второй счетчик. Импульсы, вырабатываемые датчиком 15 перемещения толкателя 28 в процессе перемещения рыбы этим толкателем, поступают во второй счетчик. В первый счетчик в это же время поступают импульсы, образующиеся в процессе обмера последующей рыбы. В остальном работа устройства в этом варианте аналогична описанной выше. Как видно из уравнений (3) и (5), наличие одновибратора 22, вырабатывающего импульс /t , позволяет уменьшить число п и соответственно уменьшить расчетный объем дешифратора 30 и емкость счетчика. Кроме того, одновибратор 22 облегчает подегулировку устройства по результатам визуального наблюдения, за процессом обработки рыб. По результатам моделирования произведен расчет экономической эффективности (экономия сырья составила (5-7%). Формула изобретения 1. Устройство для автоматического управления процессом настройки рабочих органов рыборазделочной машины, содержащее приспособление для измерения длины рыбы, выполненное в виде фотоэлектрического датчика, конечный выключатель, исполнительный механизм с приводом и систему управле1гая испотттфльным механизмом, включающую конъюнктор усилитель, распределитель импульсов, генератор импульсов и триггер, о т л и ч а ю щ ее с я тем, что, с целью повышения то1шости, jo оно снабжено датчиком перемещения и суммирующим блоком, вход последнего лодключен к выходу конъюнктора, датчику леремещения и к распределителю импульсов, вы7385: J 10 15 68 ход -,к одному из входов исполнительного механизма, другой вход исполнительного механизма соединен с выходом распределителя импульсов, а вход распределителя импл-льсов - с конечным выключателем, причем вход конъюнктора связан с генератором импульсов и с фотодатчиком непосредстве1шо и. через одновибратор. 2. Устройство по п. 1; о т л и ч а ю щ ее с я тем, что приспособленне для измерения длины рыбы снабжено световодом, расположенным между источником света фотоэлементом, при этом конец световода, обращенный к источнику света, имеет обтекаемую форму. 3. Устройство по п. 1, отличаю щ ее с я тем, что привод исполнительного механизма включает электромагнит с демпфером. 4. Устройство по п. 1, отличаю ш ее с я тем, что оно снабжено блоком контроля загрязнения фотоэлектрического датчика. Источники информации, принятые во внимание при экспертизе. 1, Авторское свидетельство СССР № 538702 кл. А 22 С 25/14, 1974 (прототап).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления рабочими органами рыборазделочной машины | 1978 |
|
SU736932A1 |
| Устройство для сортировки рыбы | 1975 |
|
SU573145A1 |
| Устройство для контроля качества пластин слюды | 1987 |
|
SU1490478A1 |
| Рыборазделочная машина | 1973 |
|
SU506368A1 |
| Устройство для настройки рабочих органов рыборазделочной машины | 1978 |
|
SU740213A1 |
| Устройство для настройки рабочего органа однооперационной рыборазделочной машины | 1974 |
|
SU613748A1 |
| Устройство для отрезания хвостового плавника рыб | 1977 |
|
SU676259A1 |
| Устройство для настройки рабочих органов рыборазделочной машины | 1976 |
|
SU682207A1 |
| Устройство для загрузки рыбы вРыбОРАздЕлОчНую МАшиНу | 1978 |
|
SU797636A1 |
| Устройство для настройки рабочих органов однооперационной рыборазделочной машины | 1974 |
|
SU538702A1 |

(8
75
Ф.
иг. 2
1ригЛ
