Изобретение относится к машиностроению, а именно к манипуляторостроению, и может быть использовано в конструкциях манипуляторов для механизации и автоматизации основных и вспомогательных операций. Целью изобретения является обеспечение быстродействия и повышения точности позиционирования за счет уменьшения динамического взаимного влияния звеньев и исключения пересчета в обобщенные координаты положения механической руки. На чертеже изображена механическая рука. Механическая рука содержит основание 1, поворотную Ш1атформу 2 с вертикальной осью вращения, приво 3 платформы, закрепленные на платформе, расположенные последовательно и шарнирно соединенные между собой звенья - 4-7. Последнее звено 7 соединено со охватом, а первое шарнирно связано с платформой. Шарниры, соединяющие звенья, имеют параллельные оси, сохраняющие горизонтальное положение при любых конфигурациях руки. Индивидуальные приводы 8-11 звеньев 4-7 соответственно установлены попарно на звеньях 4 и 5 руки соответственно. Шарниры, соединяющие звено 4 и плат форму 2 и звенья 4, 5 и 6 снабжены корпусами 12, 13 и 14, установленны с возможностью вращения относительно смежных звеньев. Корпус-12 в первом шарнире жестко связан с платформой 2. Звенья 4 и 5 руки снабжены кинематической передачей 15, связывающей корпуса 12, 13-и 14 между собой с передаточным отношением, равным единице. При этом ориентация корпусов 12, 13 и 14 относительно горизонтали при перемещении звеньев руки не меняется. Датчики положения 16, 17 и 18 установлены в шарнирах между корпусами 12, 13 и 14 и звеньями 4, 5 и 6 руки соответственно (датчики положения других звеньев на чертеже не показаны). Индивидуальные приводы 8 и 9 звеньев 4 и 5 кинематически связаны с корпусами 12 и 13. Механическая рука работает следующим образом. При вращении выходных валов индивидуальных приводов 8-11 перемещаются звенья 4-7. Так как индивидуальные приводы 8 и 9 кинематически связаны с корпусами 1 2 и 13,положение которых относительно горизонтали при любых конфигурациях руки неизменное, то при одиночной работе приводов 8 и 9 ориентация звеньев 4 и 5 также сохраняется. Датчики положения 16, 17 и 18, установленные на конечных звеньях, определяют абсолютное положение звеньев 3, Ь и 6 соответственно.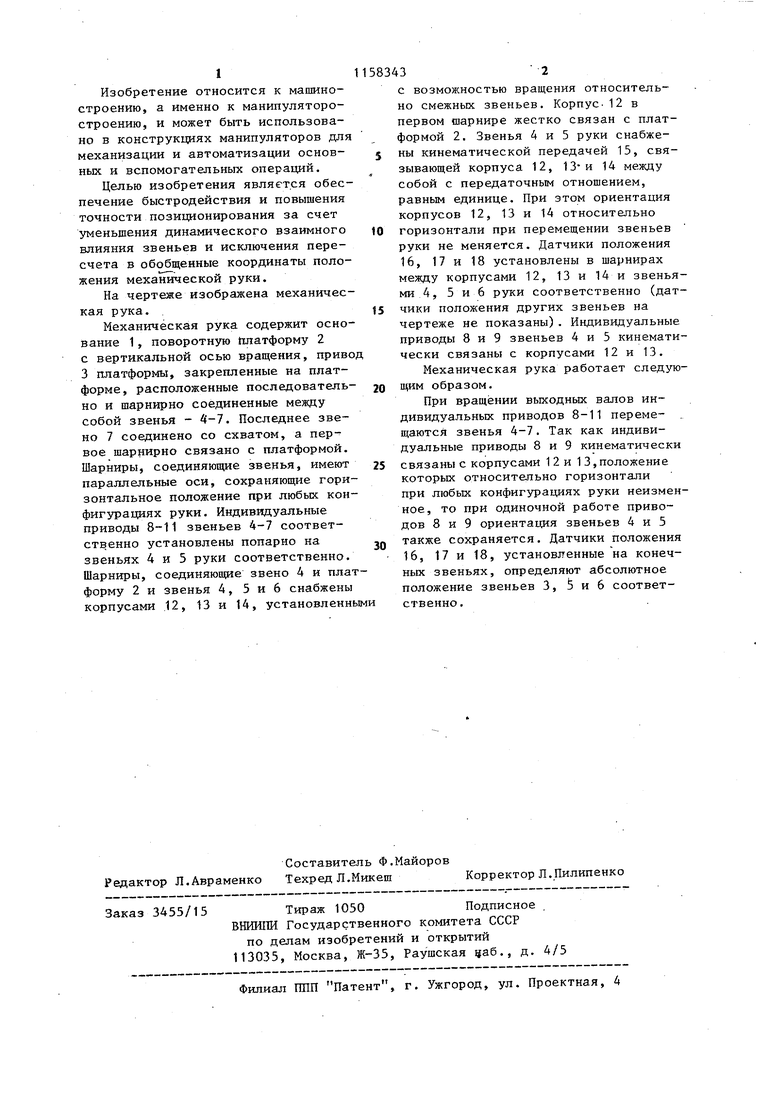
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1982 |
|
SU1085804A1 |
| ШАРНИРНЫЙ ПЛАТФОРМЕННЫЙ МАНИПУЛЯТОР | 2020 |
|
RU2751782C1 |
| Механическая рука | 1982 |
|
SU1077779A1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ АКТИВНЫЙ ПРОТЕЗ РУКИ | 1993 |
|
RU2068247C1 |
| ПРОМЫШЛЕННЫЙ РОБОТ | 1992 |
|
RU2032526C1 |
| Промышленный робот | 1987 |
|
SU1407791A1 |
| КОНТРОЛЛЕР ОПЕРАТОРА ДЛЯ УПРАВЛЕНИЯ РОБОТОХИРУРГИЧЕСКИМ КОМПЛЕКСОМ | 2019 |
|
RU2718595C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ АКТИВНЫЙ ПРОТЕЗ РУКИ | 1991 |
|
RU2026654C1 |
| Манипуляционная система | 1990 |
|
SU1784451A1 |
| Промышленный робот | 1988 |
|
SU1713797A1 |
МЕХАНИЧЕСКАЯ РУКА, содержащая поворотную платформу, на кот рой установлены звенья, расположен ные последовательно и шарнирно свя занные между собой, а первое звено шарнирно связано с платформой, а также индивидуальные приводы звеньев, закрепленные попарно на звеньях, при этом оси шарниров расположены горизонтально, отличающаяся тем, что, с целью обеспечения быстродействия и повышения точности позиционирования, шарниры снабжены корпусами,, свободно установленными на оси и кинематически связанными между собой, при этом корпус первого шарнира жестко связан с платформой, а один из пpивo yэв каждой пары кинематически связан с корпусом.
| Авторское свидетельство СССР по заявке № 3483258/25-08, кл | |||
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
