П
иг.1
//
(Л
$26
/
-Nj
со
Изобретение относится к машиностроению, в частности к промьшшен- ным роботам для автоматизации технологических операций.
Цель изобретения - уменьшение погрешности позиционирования за счет учета деформации звеньев руки от действия нагрузки.
На фиг. 1 изображен промьшшенный робот, общий вид; на фиг. 2 - кинематическая схема параллелограммного механизма привода датчика вертикаль- яого перемещения; на фиг. 3 - кине- чатическая схема параллелограммного 1еханизма привода датчика горизонтального перемещения руки,
Промьшшенный робот содержит не- тодвижное основание 1, на котором установлена поворотная платформа 2. la последней установлены привод 3 :зертикального и привод 4 горизонталь 1ого перемещений, с которыми с помощью шарниров 5 и 6 связана механическая рука, состоящая из поворотно- о звена 7, соединенного шарниром 8 с ведомым звеном 9, и двух звеньев
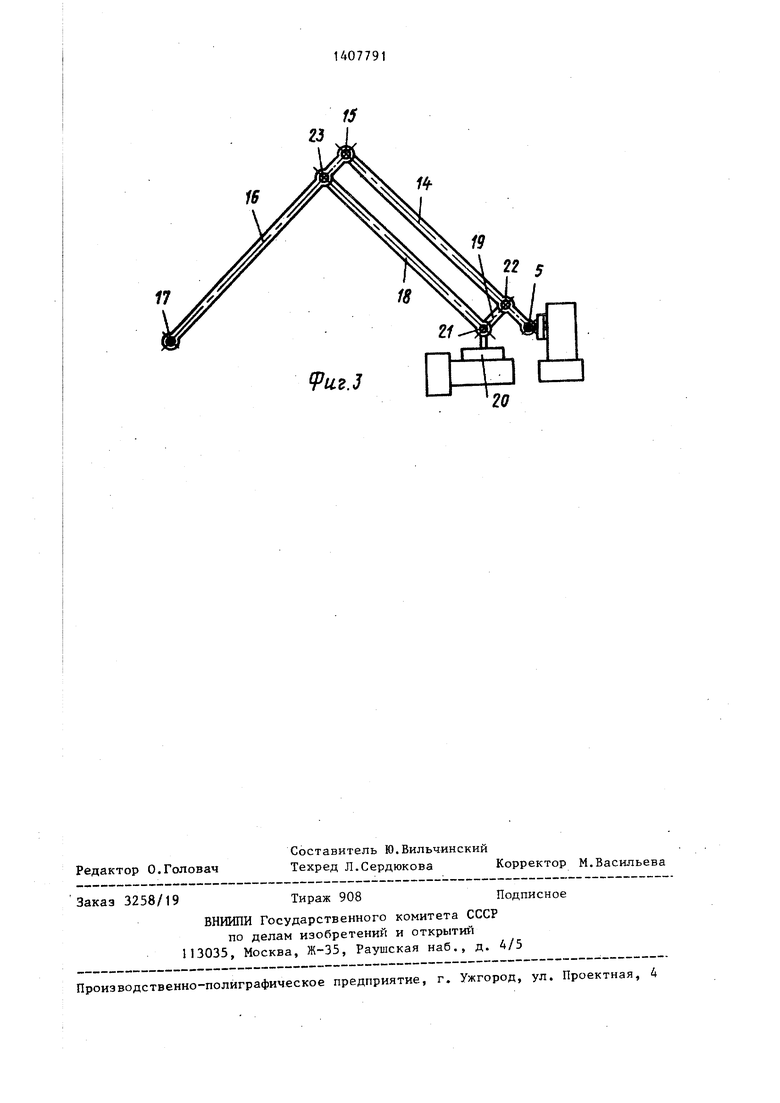
О и 11, соединенных между собой иарниром 6, а с звеньями 7 и 9 шарнирами 12 и 13 соответственно. В ме- зсанической руке также установлены 1 араллелограммный механизм привода датчика горизонтального перемещения руки, состоящий из звена 14 (фиг. 3)
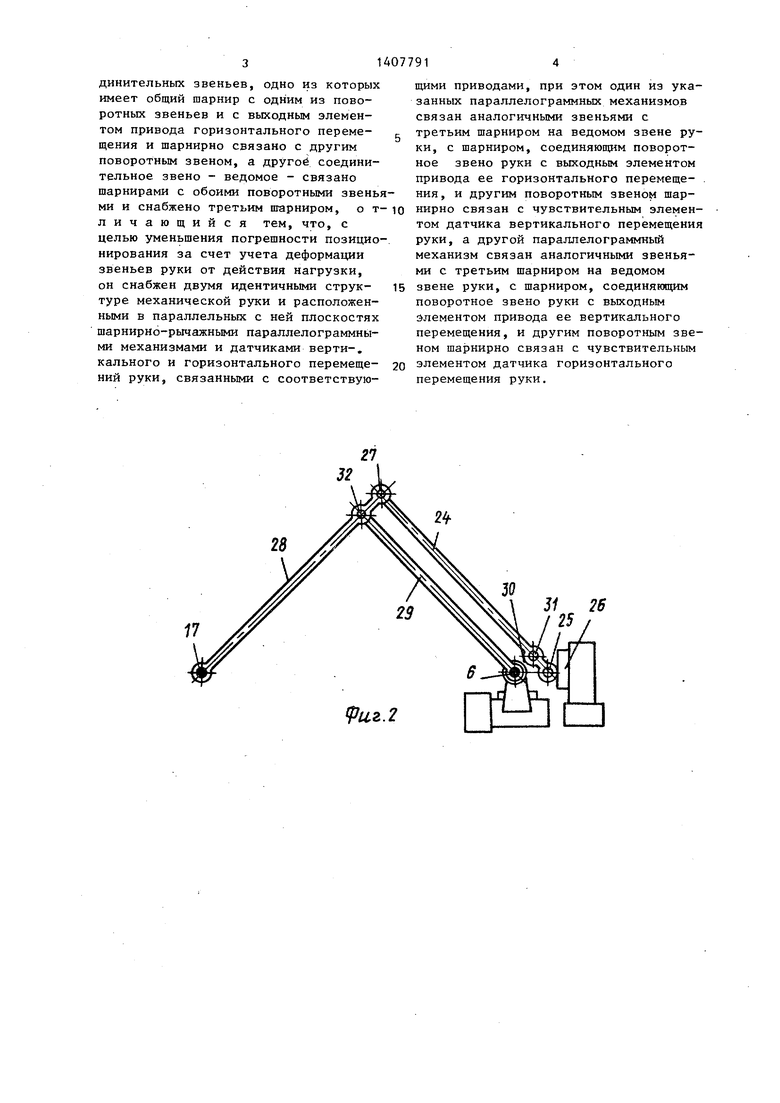
соединенного шарниром 5 с вертикаль- 1сым приводом 3, а шарниром 15 со звеном 16, которое шарниром 17 соединен с: ведомым звеном 9 механической руки ij двух звеньев 18 и 19, соединенных собой и с датчиком 20 горизон- т ального перемещения шарниром 21, и со звеньями 14 и 16 шарнирами 22 и /k3 соответственно. Параллелограммный ь еханизм привода датчика вертикаль- fjioro перемещения руки, состоящий из :-|вена 24 (фиг, 2), соединенного шар- }|иром 25 с датчиком 26 вертикального г|еремещения, а шарниром 27 со зве- t|oM 28, которое шарниром 17 соедине- rio с ведомым звеном 9 механической р|уки, и двух звеньев 29 и 30, соеди- )в енных между собой и с горизонталь- приводом 4 шарниром 6, а со звеньями 24 и 28 шарнирами 31 и 32 соответственно,
Датчики горизонтального 20 и вер- т икального 26 перемещений установле- н на горизонтальном 4 и вертикаль- HJOM 3 приводах соответственно.
0
5
0
5
0
5
0
5
0
5
Промьшшенный робот работает следующим образом.
При подаче управляющего воздействия от системы программного управления роботом на привод 3 вертикального перемещения последний через шарнир 5 передает усилие звеньям 7,9-11 механической руки. Под воздействием этого усилия происходит поворот звеньев механической руки вокруг шарниров 5,6,8,12 и 13, а шарнир 17, перемещаясь параллельно направлению перемещения шарнира 5, через звенья 28, 24, 29 и 30 параллелограммного механизма привода датчика вертикального перемещения, которые поворачиваются вокруг шарниров 27, 32, 6, 31, и через шарнир 23 приводит в действие датчик 26 вертикального пе - ремещения, который отслеживает истинное положение шарнира 17 с учетом вертикальных перемещений его вследствие деформации звеньев механической руки от нагрузки.
При подаче управляющего воздействия от системы управления на привод 4 горизонтального перемещения последний через шарнир 6 передает усилие звеньям 10, 11, 7 и 9 механической руки. Под воздействием этого усилия происходит поворот звеньев механической руки вокруг шарниров 6, 5, 12, 8 и 13, а шарнир 17, перемещаясь параллельно направлению перемещения шарнира 6, через звенья 16, 14, 18и 19 параллелограммного механизма привода датчика горизонтального перемещения и через шарнир 24 приводит в действие датчик 20 горизонтального перемещения,который Отслеживает истинное положение шарнира 17 с учетом горизонтального перемещения его вследствие деформации звеньев механической руки.
Формула и зобретения
Промьшшенньй робот, содержащий установленную на основании поворотную платформу, на которой смонтирована механическая рука и закреплены приводы ее вертикального и горизонтального перемещений, причем механическая рука вьтолнена в виде шарнирно-рычаж- ного параллелограмма, состоящего из двух ведущих поворотных звеньев, каждое из которых одним концом шарнира связано с вьпсодным элементом соответствующего привода, и двух соединительных звеньев, одно из которых имеет общий шарнир с одним из поворотных звеньев и с выходным элементом привода горизонтального перемещения и шарнирно связано с другим поворотным звеном, а другое соединительное звено - ведомое - связано шарнирами с обоими поворотными звеньми и снабжено третьим шарниром, о т личающийся тем, что, с целью уменьшения погрешности позиционирования за счет учета деформации звеньев руки от действия нагрузки, он снабжен двумя идентичными струк- туре механической руки и расположенными в параллельных с ней плоскостях шарнирно-рычажными параллелограммны- ми механизмами и датчиками верти-, кального и горизонтального перемеще- НИИ руки, связанными с соответствующими приводами, при этом один из указанных параллелограмнных механизмов связан аналогичными звеньями с третьим шарниром на ведомом звене руки, с шарниром, соединяюЕцим поворотное звено руки с выходным элементом привода ее горизонтального перемеще- НИН, и другим поворотным звеном шарнирно связан с чувствительным элементом датчика вертикального перемещения руки, а другой параллелограммньй механизм связан аналогичными звеньями с третьим шарниром на ведомом звене руки, с шарниром, соединяющим поворотное звено руки с выходным Элементом привода ее вертикального перемещения, и другим поворотным звеном шарнирно связан с чувствительным элементом датчика горизонтального перемещения руки.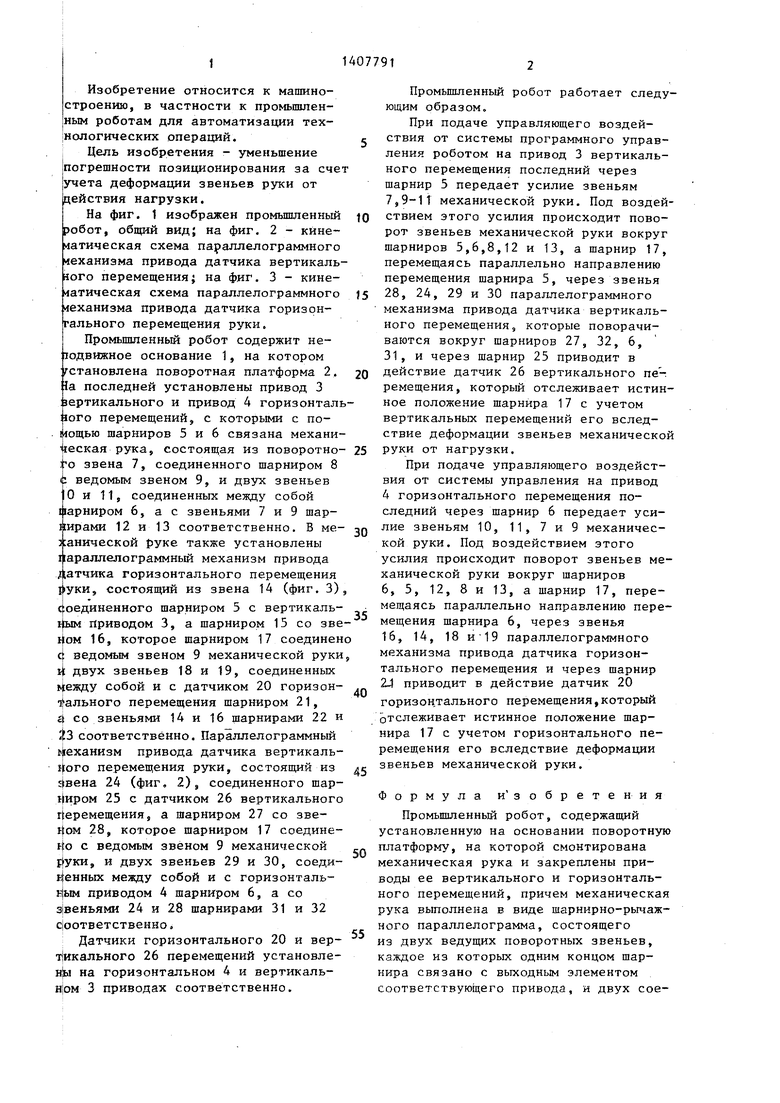
| название | год | авторы | номер документа |
|---|---|---|---|
| Промышленный робот | 1977 |
|
SU846267A1 |
| Промышленный робот | 1978 |
|
SU837851A1 |
| Промышленный робот | 1978 |
|
SU837852A1 |
| Манипулятор | 1982 |
|
SU1085804A1 |
| МАНИПУЛЯТОР | 1991 |
|
RU2022769C1 |
| Манипулятор | 1980 |
|
SU1050863A1 |
| Промышленный робот | 1977 |
|
SU837850A1 |
| Способ управления рабочим оборудованием экскаватора | 1978 |
|
SU885458A1 |
| РОБОТ, ВЫПОЛНЕННЫЙ С ИСПОЛЬЗОВАНИЕМ ПРИНЦИПА ПАРАЛЛЕЛОГРАММА | 2016 |
|
RU2663510C2 |
| Манипулятор | 1983 |
|
SU1122502A1 |
Изобретение относится к области машиностроения, в частности к промышленным роботам для автоматизации технологических операций. Цель изобретения - уменьшение погрешности позиционирования за счет учета деформации звеньев резки от действия нагрузки. При включении привода 3 вертикального перемещения или привода 4 горизонтального перемещения механической руки параллелограммного типа, состоящей из звеньев 7,9-11, перемещение шарнира 17 на ведомом звене 9 отслеживается двумя идентичными структуре механической руки и расположенными в параллельных с ней плоскостях шарнирно-рычажными параллело- граммными механизмами, взаимодействующими с датчиками, которые связаны с приводами 3 и 4. 3 ил.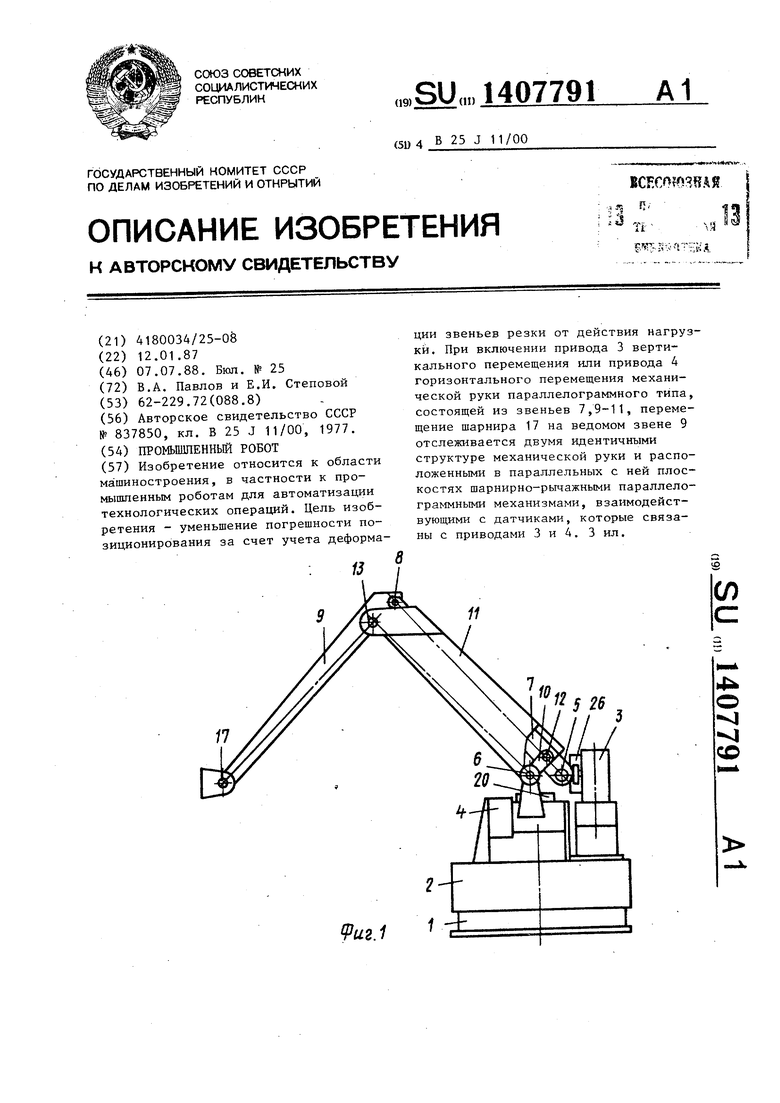
иг.2
Vuz.3
| Промышленный робот | 1977 |
|
SU837850A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
