2.Устройство по п. 1, отличающееся тем, что оно снабжено боковыми Г-образными захватами с отверстиями в вертикальных полках и размещенными в указанных отверстиях с возможностью возвратно-поступательного горизонтального перемещения направляющими штырями, которые жестко закреплены на торцах боковых стенок.
3.Устройство по п. 1, отличающееся тем, что на вертикальных полках боковых
Г-образных захватов закреплены попарно в параллельных горизонтальных плоскостях наклонные копиры для дополнительных роликов, которые закреплены на горизонтальных кронштейнах, жестко закрепленных на концах поперечных Г-образных захватов н смонтированных с возможностью возвратно-поступательного перемещения в продольных пазах, которые выполнены на вертикальных полках между копирами.
| название | год | авторы | номер документа |
|---|---|---|---|
| Кантователь для контейнеров | 1987 |
|
SU1511198A1 |
| Приспособление для поворота грузонесущего органа перегрузочной тележки | 1983 |
|
SU1143668A1 |
| УСТРОЙСТВО ДЛЯ ПОШТУЧНОЙ ВЫДАЧИ ИЗДЕЛИЙ ИЗ СТОПЫ | 1990 |
|
RU2006436C1 |
| Подъемно-опускная секция рольганга | 1983 |
|
SU1113347A1 |
| УСТАНОВКА ДЛЯ УКЛАДКИ ШТУЧНЫХ ИЗДЕЛИЙ В КАРТОННЫЕ ЯЩИКИ | 1991 |
|
RU2005678C1 |
| УКЛАДОЧНЫЙ АГРЕГАТ | 1968 |
|
SU210738A1 |
| Устройство для фиксации и прижима свариваемых деталей | 1977 |
|
SU707741A1 |
| Транспортное средство со съемным контейнером | 1986 |
|
SU1393684A1 |
| Транспортное средство для перевозки аварийных транспортных средств | 1991 |
|
SU1830014A3 |
| МОБИЛЬНАЯ АНТЕННАЯ УСТАНОВКА | 2012 |
|
RU2482578C1 |
1. УСТРОЙСТВО ДЛЯ РАЗГРУЗКИ КОНТЕЙНЕРОВ, имеющее основание, на котором закреплены стойки, смонтированная между ними с возможностью поворота приводом в вертикальной плоскости /а 2J,22 (Л сд со 00 а платформа с боковыми стенками и механизмом фиксации контейнера, отличающееся тем, что, с целью повышения эффективности путем повышения надежности фиксации контейнера оно снабжена смонтированными на боковых стенках платформы с возможностью качания в вертикальнрй плоскости вертикальными двуплечими рычагами, на верхнем плече каждого из которых жестко закреплен поперечный Г-образный захват, а нижнее плечо выполнено подпружиненным 8 виде горизонтальной вилки, в которой с возможностью враСцения на оси установлен ролик для взаимодействия с криволинейным упором , который жестко закреплен на одной из стоек. .ф Л V W f /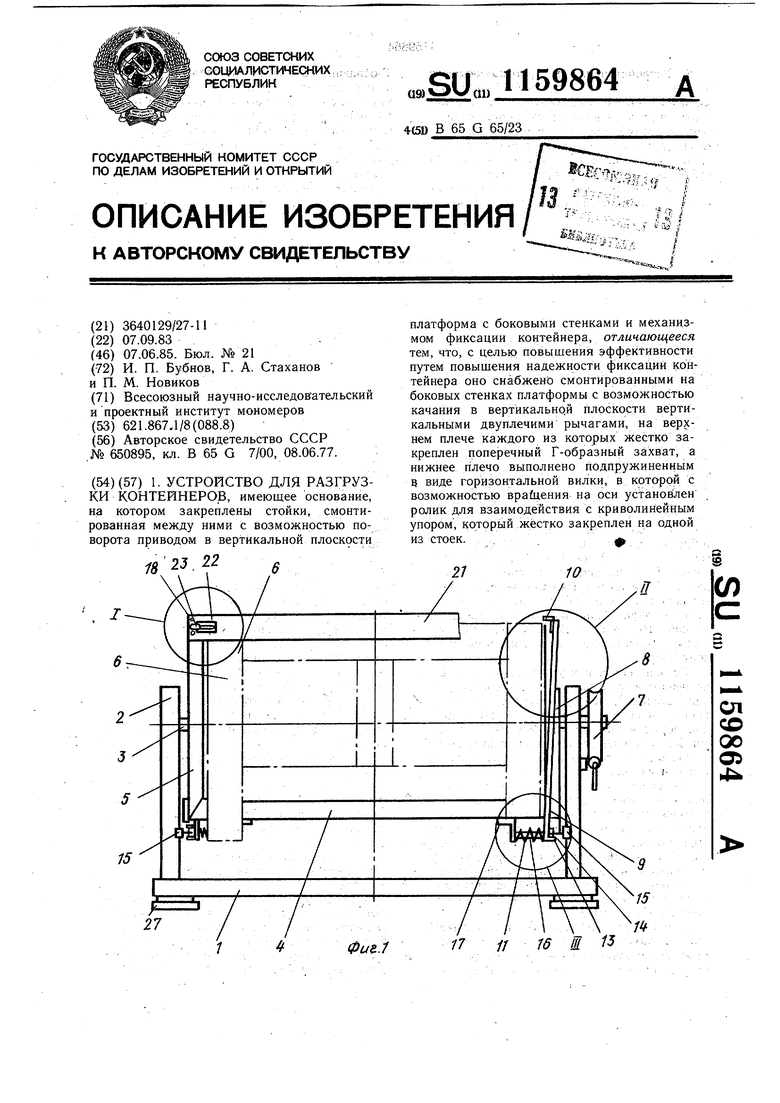
1
Изобретение относится к устройствам, используемым для разгрузки контейнеров преимущественно коробчатой формы путем их опрокидывания.
Целью изобретения является повышение эффективности путем повышения надежности фиксации контейнера.
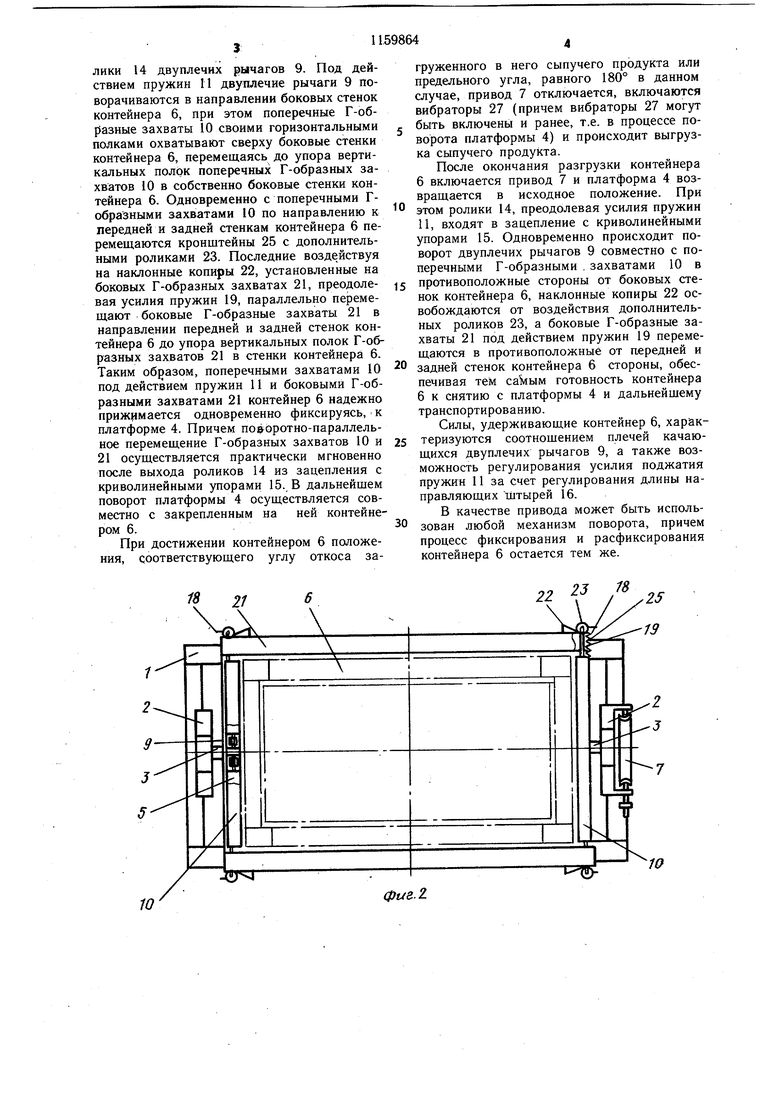
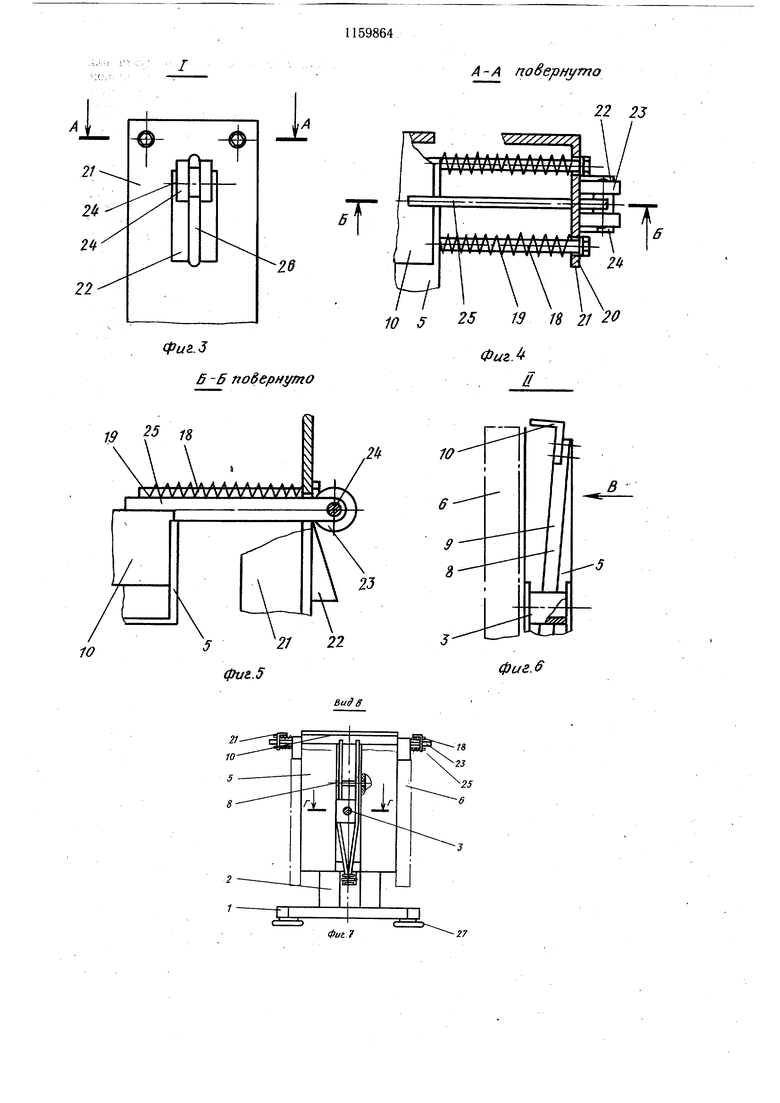
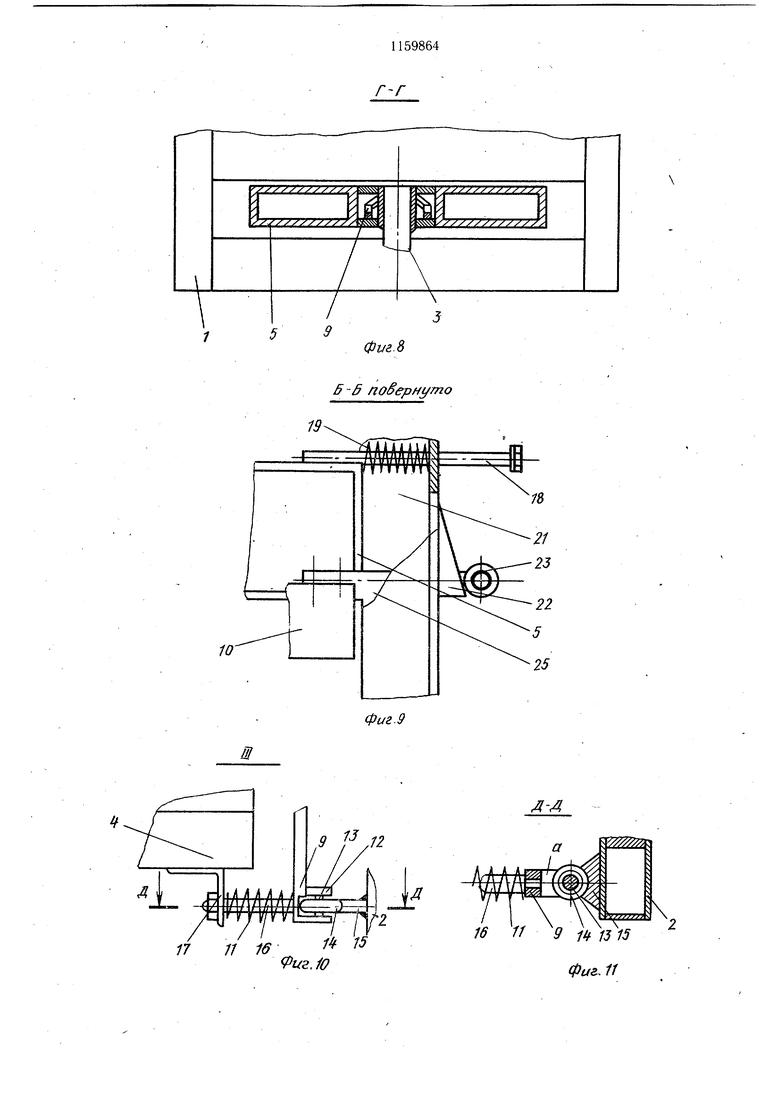
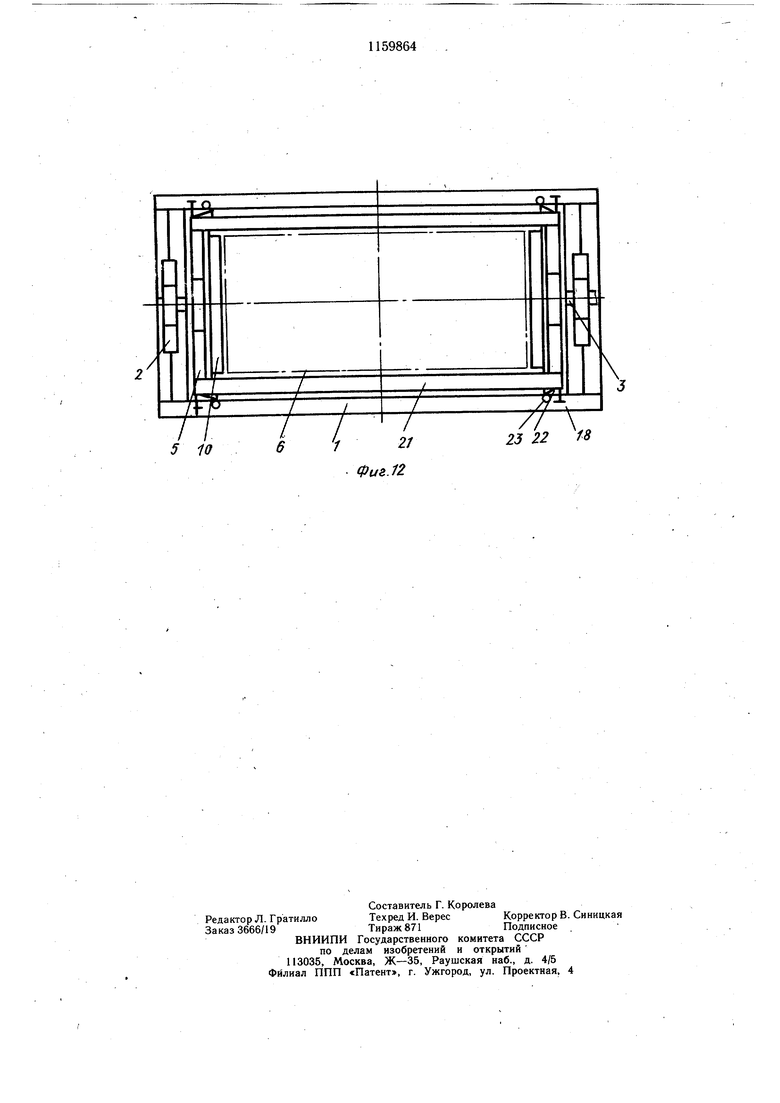
На фиг. 1 изображено устройство для разгрузки контейнеров, общий вид; на фиг. 2 - то же, вид сверху (положение перед установкой контейнера); на фиг. 3 - узел I на фиг. 1; на фиг. 4 - разрез А-А на фиг. 3; на фиг. 5 - разрез Б-Б на фиг. 4 (положение перед установкой контейнера); наЧфиг. 6 - узел II фиг. 1; на фиг. 7 - вид В на фиг. 6; на фиг. 8 - разрез Г-Г на фиг. 7; на фиг. 9 - разрез Б-Б на фиг. 4 (положение при зафиксированном контейнере); на фиг. 10 - узел III на фиг. 1; на фиг. 11 - разрез Д-Д на фиг. 10; на фиг. 12 - устройство, вид сверху (положение при зафиксированном контейнере).
Устройство содержит основание 1 выполненное в виде рамы, на которой закреплены стойки 2, между которыми с возможностью поворота на осях 3 установлена платформа 4, снабженная боковыми стенками 5 и механизмом фиксации контейнера 6 и привода 7, соединенного кинематически с одной из осей 3.
Механизм фиксации содержит качающиеся на осях 8 двуплечие рычаги 9, на верхнем плече каждого из которых жестко закреплен поперечный Г-образный захват 10, а нижний выполнен подпружиненным пружиной 11 в виде горизонтальной вилки 12, в которой с возможностью вращения на оси 13 установлен ролик 14, взаимодействующий с криволинейным упором 15, жестко закрепленным на стойке 2.
Для обеспечения эффективности фиксации пружины 11 установлены с возможностью регулирования на направляющих штырях 16, причем один конец их опирается в
нижнее плечо двуплечего рычага 9, а другой - в упор 17, жестко прикрепленный к платформе 4. На торцах боковых стенок 5 платформы 4 жестко закреплены направляющие штыри 18, на которых установлены пружины 19. Штыри 18 через отверстия 20, выполненные в вертикальных полках боковых Г-образных захватов 21, взаимодействуют с последними с возможностью возвратно-поступательного горизонтального перемещения.
На вертикальных полках боковых Г-образных захватов 21 попарно в параллельных горизонтальных плоскостях закреплены наклонные копиры 22, с которыми взаимодействуют дополнительные ролики 23, с возможностью вращения установленные на осях 24, расположенных на горизонтальных кронщтейнах 25, жестко закрепленных на концах поперечных Г-образных захватов 10, и смонтированных с возможностью возвратно-поступательного перемещения в продольных пазах 26, выполненных , на вертикальных полках поперечных Г-образных захватов 10. Причем продольные пазы 26 выполнены между наклонными копирами 22.
Для увеличения выгружной способности продукта снизу основания установлен вибратор 27.
Устройство работает следующим образом.
Контейнер 6 устанавливается на платформу 4 таким образом, что выступающие ножки его попарно сзади и спереди располагаются ниже уровня нижней плоскости платформы 4.
При включении привода 7 крутящий момент передается одной из осей 3 и далее платформе 4.
Платформа 4 поворачивается на некоторый угол, который зависит от габаритных размеров устройства, а также от размеров и массы контейнера 6, не превышающий в среднем, более 5°. При этом из зацепления с криволинейными упорами 15 выводятся ролики 14 двуплечих рычагов 9. Под действием пружин II двуплечие рычаги 9 поворачиваются в направлении боковых стенок контейнера 6, при этом поперечные Г-образные захваты 10 своими горизонтальными полками охватывают сверху боковые стенки контейнера 6, перемещаясь до упора вертикальных полок поперечных Г-образных захватов 10 в собственно боковые стенки контейнера 6. Одновременно с поперечными Гобразными захватами 10 по направлению к передней и задней стенкам контейнера 6 перемещаются кронщтейны 25 с дополнительными роликами 23. Последние воздействуя на наклонные копиры 22, установленные на боковых Г-образных захватах 21, преодолевая усилия пружин 19, параллельно перемещают боковые Г-образные захваты 21 в направлении передней и задней стенок контейнера 6 до упора вертикальных полок Г-образных захватов 21 в стенки контейнера 6. Таким образом, поперечными захватами 10 под действием пружин 11 и боковыми Г-образными захватами 21 контейнер 6 надежно прижимается одновременно фиксируясь, к платформе 4. Причем по&оротно-параллельное перемещение Г-образных захватов 10 и 21 осуществляется практически мгновенно после выхода роликов 14 из зацепления с криволинейными упорами 15. В дальнейщем поворот платформы 4 осуществляется совместно с закрепленным на ней контейнером 6.
При достижении контейнером 6 положения, соответствующего углу откоса загруженного в него сыпучего продукта или предельного угла, равного 180° в данном случае, привод 7 отключается, включаются вибраторы 27 (причем вибраторы 27 могут быть включень и ранее, т.е. в процессе поворота платформы 4) и происходит выгрузка сыпучего продукта.
После окончания разгрузки контейнера 6 включается привод 7 и платформа 4 возвращается в исходное положение. При
0 этом ролики 14, преодолевая усилия пружин 11, входят в зацепление с криволинейными упорами 15. Одновременно происходит поворот двуплечих рычагов 9 совместно с поперечными Г-образными . захватами 10 в противоположные стороны от боковых сте5нок контейнера 6, наклонные копиры 22 освобождаются от воздействия дополнительных роликов 23, а боковые Г-образные захваты 21 под действием пружин 19 перемещаются в противоположные от передней и
0 задней стенок контейнера 6 стороны, обеспечивая тем cakbiM готовность контейнера 6 к снятию с платформы 4 и дальнейшему транспортированию.
Силы, удерживающие контейнер 6, характеризуются соотнощением плечей качаю5щихся двуплечих рычагов 9, а также возможность регулирования усилия поджатия пружин 11 за счет регулирования длины направляющих штырей 16.
В качестве привода может быть исполь0зован любой механизм поворота, причем процесс фиксирования и расфиксирования контейнера 6 остается тем же. Фиг.З Б -б повернуто J A-A повернуто 22 23 25 13 и 21 20 Фиг.
noSepHi mo
3
фиг.8
Д-Д
a
16 11 9 lit Фиг, 11
Фи&.12
| Устройство для разгрузки контейнеров путем их опрокидывания | 1977 |
|
SU650895A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
