Изобретение относится к области обработки материалов резанием, а именно к механизмам базирования приспособления-спутника на металлорежущем оборудовани. Известен механизм закрепления, выполненный в виде размещенных в Т-образном пазу стола самотормозящих подвижных клиньев, связанных с гидроцилиндром и установленных с возможностью взаимодействия с прихватами 1. Недостатком указанного устройства являются ограниченные технологические возможности, обусловленные невозможностью базирования приспособлений спутников. Наиболее близким к изобретению является механизм базирования приспособленияспутника, выполненный в виде выдвижного фиксатора и прихватов, контактирующих со спутником посредством самотормозящих подвижных клиньев, связанных со щтоком гидроцилиндра 2. Недостатком данного механизма является сложность конструкции. Цель изобретения - упрощение конструкции. Указанная цель достигается тем, что в механизме базирования приспособленияспутника, выполненном в виде выдвижного фиксатора и прихватов, контактирующих со спутником посредством самотормозящих подвижных клиньев, связанных со щтоком гид. роцилиндра, между самотормозящими подвижными клиньями установлены введенные в механизм пружина и регулировочный стержень, а на выдвижном фиксаторе и спутнике выполнены скосы, предназначенные для взаимодействия друг с другом. Такое выполнение механизма упрощает его конструкцию. На фиг. 1 изображен механизм базирования приспособления-спутника, вид сверху; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 2. На столе 1 закреплены горизонтальные базы 2, боковые базы 3, упор 4. По бокам стола 1 расположены ролики 5. В двух продольных пазах стола 1 размещен механизм базирования, состоящий из основания 6, крышки 7, гидроцилйндра 8, шток 9 которого соединен с самотормозящим подвижным клином 10, который в свою очередь с помощью регулировочного стержня 11 и пружины 12 соединен с самотормозящим подвижным клином 13. На конце клина 13 выполнен скос В для управления выдвижным фиксатором 14, который подпружинен пружиной 15, размещенной в столе 1. Гидроцилиндр 8 расположен оппозитно выдвижному фиксатору 14 относительно оси стола 1. Выдвижной фиксатор 14 выполнен со скосом 1, взаимодействующим со скосом D вкладыша 16, закрепленного в приспособлеНИИ-спутнике 17. Клиновые поверхности самотормозягцих клиньев 10 и 13 опираются на клиновые поверхности Т-образных прихватов 18, которые входят в пазы, образованные приспособлением-спутником 17 и жестко прикрепленными к нему планками 19. Прихваты 18 подпружинены пружинами 20. Прижим приспособления-спутника 17 к боковым базам 3 производится с помощью рычажно-клинового механизма 21. По бокам стола 1 расположены ролики 5, причем предыдущие ролики 5 смещены относительно последующих в поперечном направлении, Механизм работает следующим образом, При загрузке на стол 1 станка приспособления-спутника 17 последний перекатывают на ролики 5 до упора 4, в конце перемещения ролики 5 входят в соответствующие им выемки, выполненные на планках 19, и приспособление-спутник 17 опускается на базы 2. При этом прихваты 18 и боковые базы 3 проходят в пазах, образованных приспособлением-спутником 17 и планками 19. Опускание приспособления-спутника 17 во время его перемещения не происходит, поскольку в промежуточных положениях ролики 5 и выемки в планках 19 не совпадают. Для зажима приспособления-спутника масло подают в щтоковую полость гидроцилиндра 8, шток 9 которого перемещает самотормозящие подвижные клинья 10 и 13. Расстояние между самотормозящими подвижными клиньями 10 и 13 устанавливают регулировочным стержнем 11 таким образом, что первоначально срабатывает прихват 18, приводимый самотормозящим подвижным клином 13, прижимая планки 19 приспособления-спутника к базам 2. Затем пружина 12 сжимается, а самотормозящий подвижный клин 10 перемещается до срабатывания второго прихвата 18. Последовательное срабатывание прихватов 18 обеспечивает надежность базирования и зажима приспособления-спутника 17. В момент срабатывания гидроцилиндра 8 скос В самотормозящего подвижного клина 13 выходит из контракта со скосом Г выдвижного фиксатора 14, который перемещается под действием пружины 15 и своим скосом Г нажимает на скос D вкладыша 16, поджимая тем самым приспособление-спутник 17 к упору 4. Далее механизм 21 поджимает приспособление-спутник 17 к боковым базам 3, и процесс базирования завершается, Разжим приспособления-спутника 17 ведется в обратной последовательности, причем скос В самотормозящего подвижного клина 13 перемещает фиксатор 14, сжимая пружину 15. Благодаря такому выполнению механизма обеспечивается надежное безирование приспособления-спутника на столе станка, причем механизм базирования .имеет простое устройство, небольшие габариты и обеспечивает высокую точность базирования.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство базирования приспособления-спутника на рабочем столе металлорежущего станка | 1984 |
|
SU1255383A1 |
| Механизм базирования приспособленияспутника | 1974 |
|
SU519313A1 |
| Приспособление-спутник | 1983 |
|
SU1169801A1 |
| Установка для сборки и сварки изделий | 1980 |
|
SU872154A1 |
| ПРИСПОСОБЛЕНИЕ-СПУТНИК | 1973 |
|
SU383569A1 |
| Установочная каретка для центрирования и зажима грифов музыкальных инструментов | 1985 |
|
SU1276492A1 |
| Агрегатный станок | 1986 |
|
SU1423348A1 |
| Самоцентрирующие тиски | 1978 |
|
SU812553A1 |
| СТАНОК ДЛЯ ЗАВИНЧИВАНИЯ ШПИЛЕК | 2001 |
|
RU2197368C2 |
| Устройство для фиксации и зажима приспособления-спутника | 1990 |
|
SU1764933A1 |

МЕХАНИЗМ БАЗИРОВАНИЯ ПРИСПОСОБЛЕНИЯ-СПУТНИКА, выполненный в виде выдвижного фиксатора и прихватов, контактирующих со спутником посредством самотормозящих подвижных клиньев, связанных со щтоком гидроцилиндра, отличающийся тем, что, с целью упрощения конструкции, между самотормозящими подвижными клиньями установлены введенные в механизм пружина и регулировочный стержень, а на выдвижном фиксаторе и спутнике выполнены скосы, предназначенные для взаимодействия друг с другом. С/) О5 СА: СО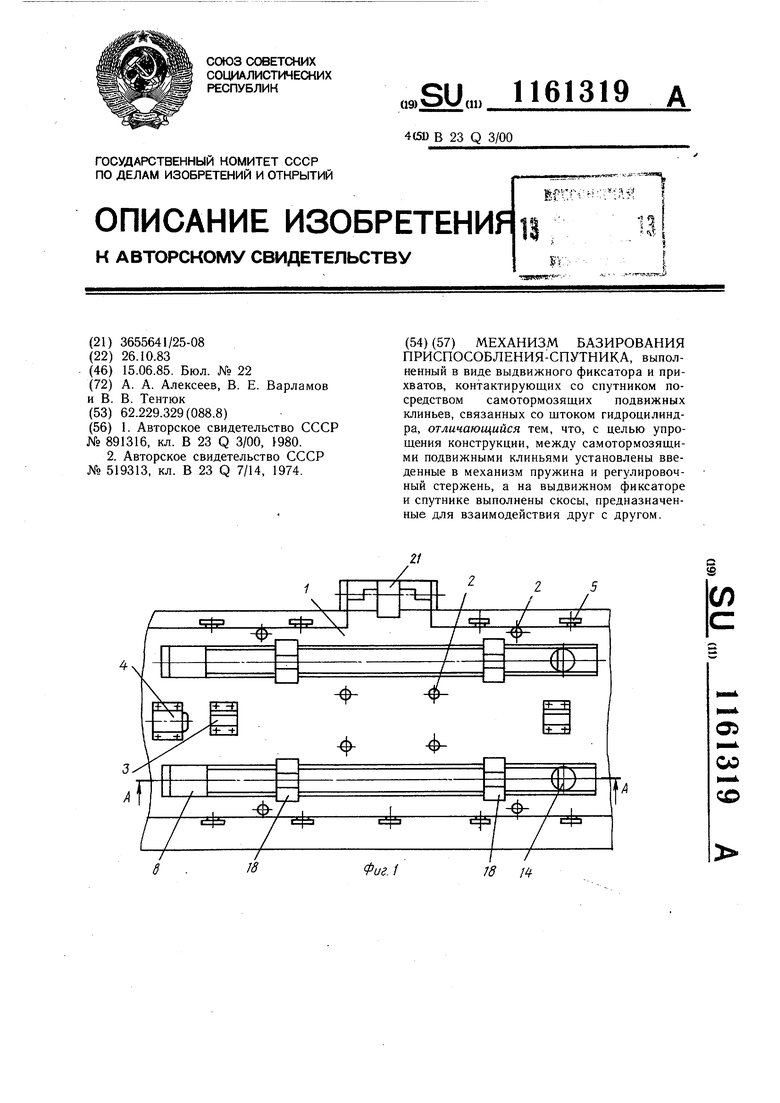
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для закрепления деталей на станках с ЧПУ | 1980 |
|
SU891316A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Механизм базирования приспособленияспутника | 1974 |
|
SU519313A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
