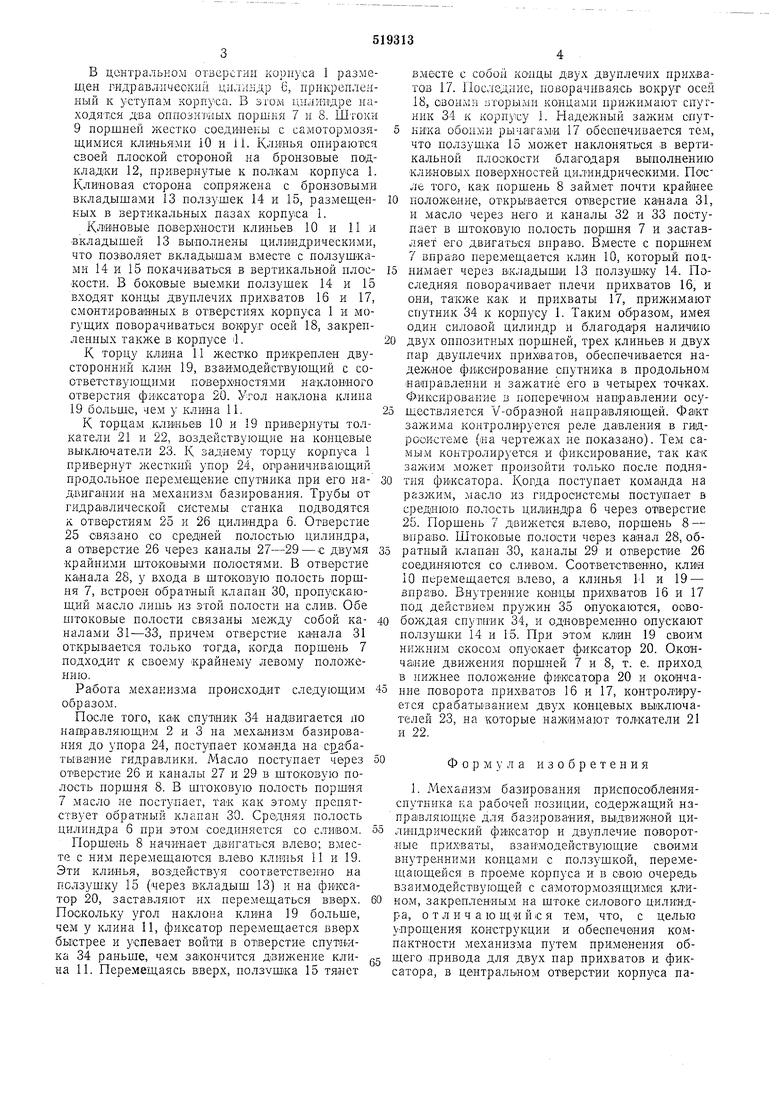
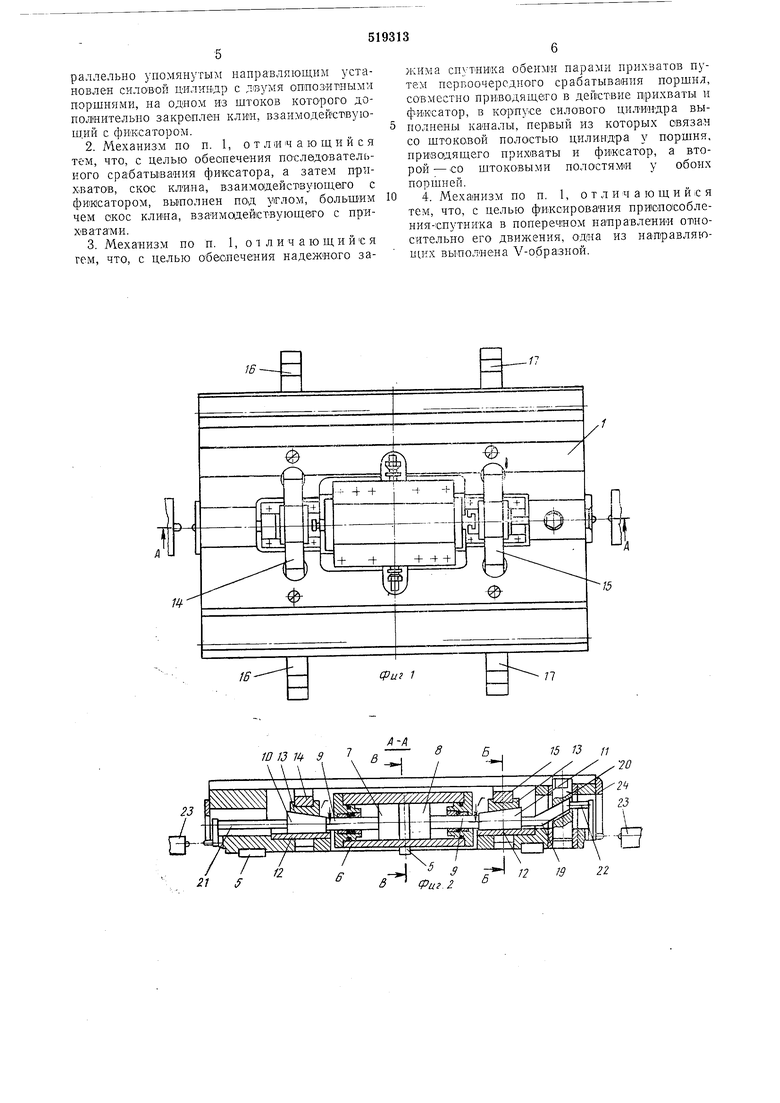
В центральном отверстии корпуса 1 размещен гидравЛЯчеокны цилиндр 6, прикрепленный к уступам корпуса. В зтом цилиндре паходятся два олпозитиых иоршня 7 п 8. Штоки 9 поршней жестко соединены с самотормозящимися клинья ми 10 и 11. Клинья опираются своей плоской стороной на бронзовые подкладки 12, ирнвериутые к полкам корпуса 1. Клиновая сторона сопряжена с бронзовыми вкладышами 13 ползушек 14 и 15, размещенных в вертикальных пазах корпуса 1. Клиновые Н0|верхно:сти клиньев 10 и 11 и вкладышей 13 выполнены цилиндрическими, что позволяет вкладышам вместе с ползуш«ами 14 и 15 покачиваться в вертикальной плоскости. В бОКавые выемки ползушек 14 и 15 входят концы двуплечих прихватов 16 и 17, смонтированных в отверстиях корпуса 1 и могущих поворачиваться вокруг осей 18, закрепленных также в корпусе 1. К торцу клияа 11 жестко прикреплен двусторонний клрш 19, взаимодействующий с соответствующи.ми поверхностями наклонного oтвepicтия фиксатора 20. Угол наклона клина 19 больше, чем у клина И. К торцам клиньев 10 и 19 привернуты толкатели 21 и 22, воздействующие на концевые выключатели 23. К заднему торцу корпуса 1 привернут жесткий упор 24, орраиичивающ-ий продольное перемещение спутника нри его надвигании на механизм базирования. Трубы от гидравлической системы станка подводятся к отвйрстиям 25 и 26 цилиндра 6. Отверстие 25 связано со средней полостью цилиндра, а отверстие 26 через каналы 27-29 - с двумя крайними штоко1ВЫМИ полостями. В отверстие канала 28, у входа в штоковую полость порщня 7, встроен обратный клапан 30, пропускаюш,ий масло лишь из зтой полости на слив. Обе штоковые полости связаны между собой каналами 31-33, причем отверстие канала 31 открывается только тогда, когда поршень 7 подходит к своему крайнему левому положению. Работа механизма происходит следующим образом. После того, как спутник 34 надвигается по направляющим 2 и 3 на механизм базирования до упора 24, поступает команда на с а-батывание гидравлики. Масло поступает через отвер стие 26 и каиалы 27 и 29 в штоковую полость поршня 8. В штоковую полость поршня 7 масло не поступает, так как этому препятствует обратный клапан 30. Средняя полость цилиндра 6 при зтом соединяется со сливом. Поршень 8 начинает двигаться влево; вместе с ним перемещаются влево клинья II и 19. Эти клинья, воздействуя соотвегственно на пслзущку 15 (через вкладыш 13) и на фиксатор 20, заставляют их перемещаться вверх. Поскольку угол наклона клина 19 больше, чем у клина 11, фиксатор неремещается вверх быстрее и успевает войти в отверстие спутника 34 раньше, чем закончится движение клина 11. Перемещаясь вверх, ползишка 15 тянет вместе с собой концы двух двуплечих прихватов Г/. Последние, поворачиваясь вокруг осей 18, ОБОИМИ iJTopbiMH концами прижимают спутник 34 к корИ} су 1. Падежный зажим опутника обОИми рычагами 17 обеспечивается тем, что ползушка 15 может наклоняться в вертикальной плоскости благодаря выполнению клиновых поверхностей цилиндрическими. Пос ле того, как поршень 8 займет почти крайнее положение, открывается отверстие канала 31, и масло через него и каналы 32 и 33 поступает в штоковую полость поршня 7 и заставляет его двигаться вправо. Вместе с поршнем 7 вправо перемещается клин 10, который поянимает через вкладыши 13 нолзушку 14. Последняя поворачивает плечи прихватов 16, и они, также KaiK и прихваты 17, прижимают спутник 34 к корпусу 1. Таким образом, имея один силовой цилиндр и благодаря наличию двух оппозитных поршней, трех клиньев и двух пар двуплечих прихватов, обеспечивается надежное фиксирование спутника в нродольном направлении и зажатие его в четырех точках. Фиксирование з поперечном направлении осуществляется V-образной направляющей. Факт зажима контролируется реле давления в гидросистеме («а чертежах не показано). Тем самым контролируется и фиксирование, так каК может произойти только после поднятия фиксатора. Когда поступает команда на разжим, масло из гидросистемы поступает в среднюю полость цилиндра 6 через отверстие 25. Поршень 7 влево, поршень 8 - вправо. Штоковые полости через канал 28, обратный клапан 30, каиалы 29 и отвер1стие 26 соединяются со сли1ВО;М. Соответственно, клин 10 перемещается влево, а клинья М и 19 - вправо. Внутренние концы прихватов 16 и 17 под действием пружин 35 опускаются, освобождая спутиик 34, и одновременно опускают ползушки 14 и 15. При этом клин 19 своим нижним скосом опускает фиксатор 20. Окончание движеиия поршней 7 и 8, т. е. приход в иижнее положение фиксатора 20 и окончание поворота прихвато1Б 16 и 17, контролируется срабатыванием двух концевых вьвключателей 23, на которые нажимают толкатели 21 и 22. Формула изобретения 1. Механизм базирования приспособленияпутника ка рабочей позиции, содержащий наравляющие для базирования, выдвижной цииндрический фиксатор и двуплечие поворот ые прихваты, взаимодействующие своими нутренними концами с ползушкой, перемеающейся в проеме корпуса и в свою очередь заимодействующей с самотормозящимся клиом, закрепленным на штоке силового цилинда, о т л и ч а ю щ и и ic я тем, что, с целью прощеиия конструкции и обеспечения комактности механизма путем применения обего привода для двух пар прихватов и фикатора, в центральном отверстии корпуса параллельно упомянутым направляющим установлен СИЛОВОЙ цилиндр с двумя 0Н:НОЗИта1ЫМИ
норшнями, на одном нз штоков которого дополнительно закреплен клин, взаимодействующий с фиксатором.
2.Механизм по н. 1, отличающийся тем, что, с целью обеспечения последовательного срабатывания фиксатора, а затем прихватов, скос клина, взаимо дейст1вующего с фиксатором, выполнен под углом, большем чем скос клина, взаимодействующего с прихватами.
3.Механизм по п. 1, отличающийся гем, что, с целью обеспечения надежного зажима спутника ооеим1И парами прихватов путем перБоочерсдного срабатывания поршнл, совместно приводящего в действие прихваты и фиксатор, в корпусе силового цилиндра выгюлнены каналы, nepiBbu из которых овязач со щтоко.вой полостью цилиндра у поршня, приводящего прихваты и фвксатор, а второй-со штокОВыми ПОЛОСТЯМИ у обоих порщней.
4. Механизм по п. 1, отличающийся тем, что, с целью фиксирования приюпособления-€путника в поперечном нанравленин оташсительно его движения, одна из направляющих выполнена У-образной.
| название | год | авторы | номер документа |
|---|---|---|---|
| Механизм базирования приспособления-спутника | 1983 |
|
SU1161319A1 |
| Многопозиционное захватное устройство | 1983 |
|
SU1180261A1 |
| Гидравлическое зажимное устройство | 1978 |
|
SU753590A1 |
| Устройство для точного радиального перемещения инструмента | 1980 |
|
SU931311A1 |
| Захватное устройство | 1984 |
|
SU1199614A1 |
| ШТАМП ДЛЯ РАЗДЕЛИТЕЛЬНЫХ ОПЕРАЦИЙ | 1992 |
|
RU2006320C1 |
| Способ листовой штамповки и устройство для его осуществления | 1989 |
|
SU1712031A1 |
| Установка для резки листового материала | 1985 |
|
SU1271682A1 |
| Устройство для прокатки колец шарикоподшипников | 1988 |
|
SU1803240A1 |
| Устройство для подачи листового материала в зону обработки | 1987 |
|
SU1442301A1 |
10 /J т э в Г - I -Н 15 13 Фиг. 2 fi
J4« 3
18
1 -
J2В-В 2В.27
25
,«/I Mi oSfowmo
J2- -Уj;
JJ
718
иг.
Г г noBeoHtjmo
