2. Устройство по П.1, о т,л ичающееся тем, что система уравнивания связана со,стропом, пропущенным через дополнительный
рол, и снабжена направляющим ролом, смонтированным на судне эксцентрично относительно оси шарнира несущей рамы.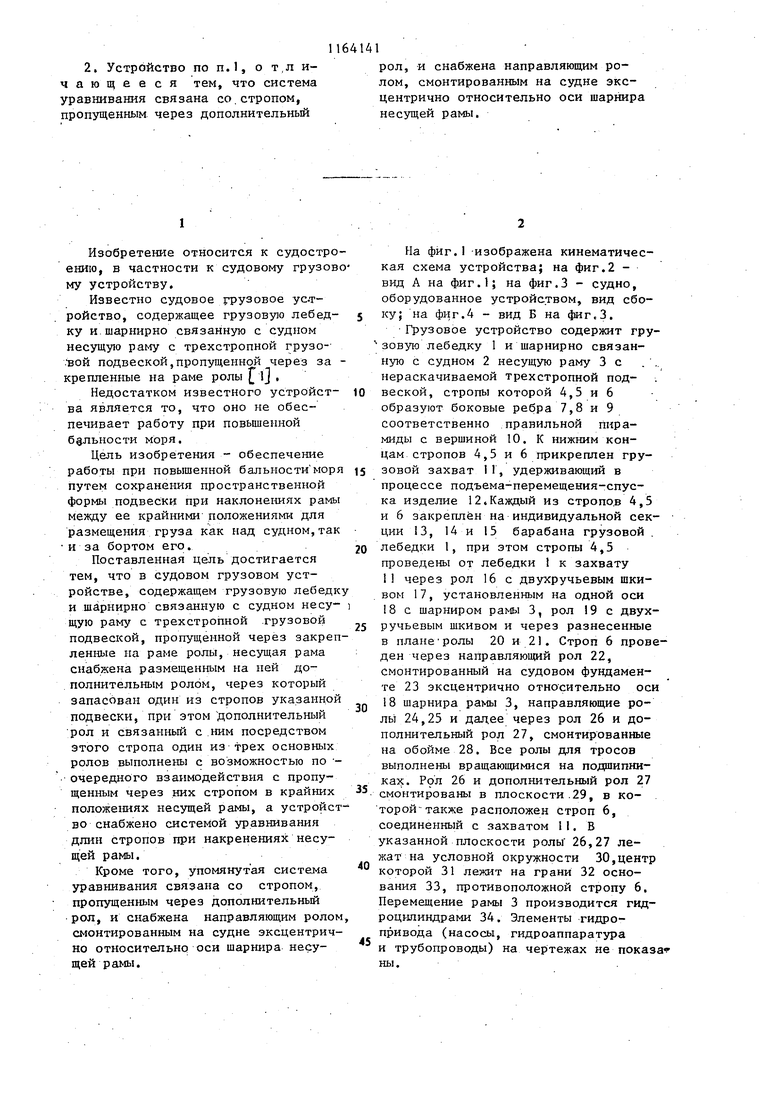
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ СПУСКА И ПОДЪЕМА ПЛАВАЮЩЕГО ОБЪЕКТА | 1991 |
|
RU2013290C1 |
| Судовое устройство для спуска и подъема изделий | 1983 |
|
SU1093611A1 |
| Судовое грузовое устройство | 1978 |
|
SU1224210A1 |
| Трюмная машина | 1979 |
|
SU863507A1 |
| ТРАВЕРСА СПУСКО-ПОДЪЕМНОГО УСТРОЙСТВА | 2015 |
|
RU2616452C2 |
| Судовое подъемно-опускное устройство для подводного контейнера с исследовательской аппаратурой | 1981 |
|
SU1009883A1 |
| Буровое судно | 1980 |
|
SU906785A1 |
| Судовое спуско-подъемное устройство для контейнера с исследовательской аппаратурой | 1978 |
|
SU785108A1 |
| Судовое спуско-подъемное устройство | 1983 |
|
SU1110715A1 |
| СУДОВОЕ УСТРОЙСТВО ДЛЯ ПОДЪЕМА ЗАТОНУВШЕГО ОБЪЕКТА | 1991 |
|
RU2013301C1 |
I. СУДОВОЕ ГРУЗОВОЕ УСТРОЙСТВО, содержащее грузовую лебедку и шарнирно связанную с судном несущую раму с грехе троп ной грузовой подвеской, пропущенной через закрепленные на раме ролы, о т л и ч аю щ ее с я тем,что, с целью обеспечения работы при повьшенной бальности моря путем сохранения пространственной формы подвески при наклонениях рамы между ее крайними прложениями для размещения груза как над судном, так и за бортом, его несущая рама снабжена размещенным на ней дополнительным ролом, через который запасован один из стропов указанной подвески, при этом дополнительный рол и связанный с ним посредством этого стропа один из трех основных ролов выполнены с возможностью поочередного взаимодействия с пропущенным через ннх стропом в крайних положениях несущей ргалл а устройство снабжено системой урав низания длин стропов при накренениях несущей рамы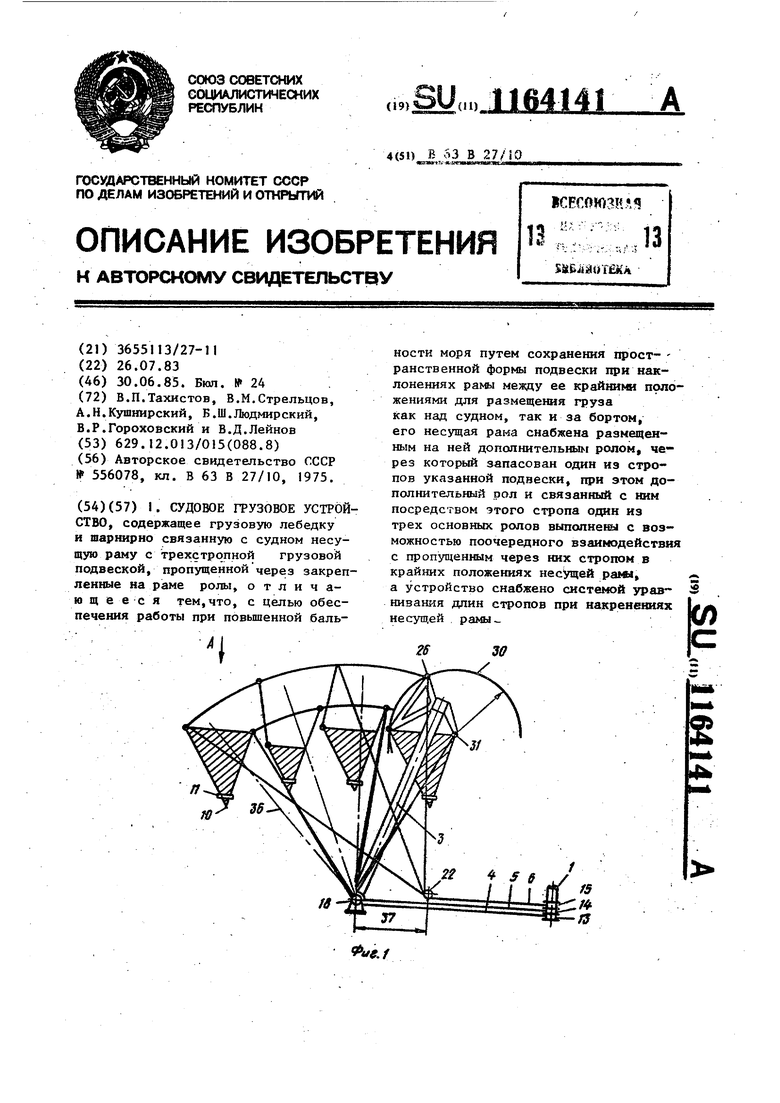
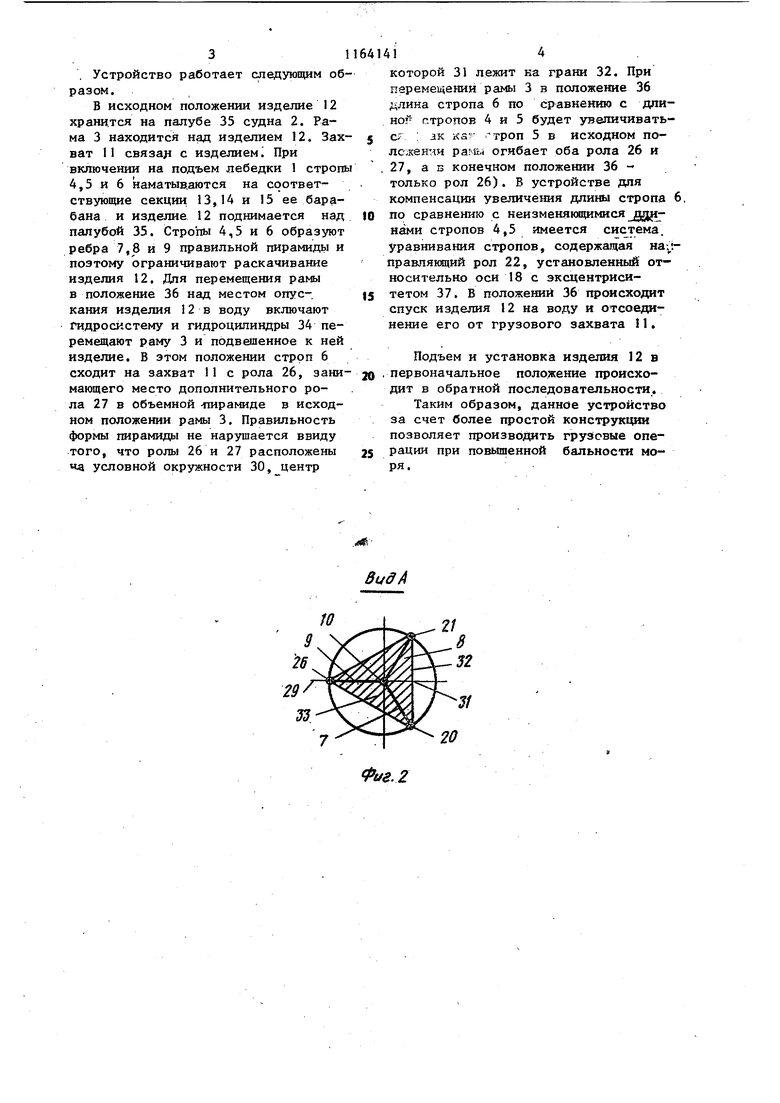
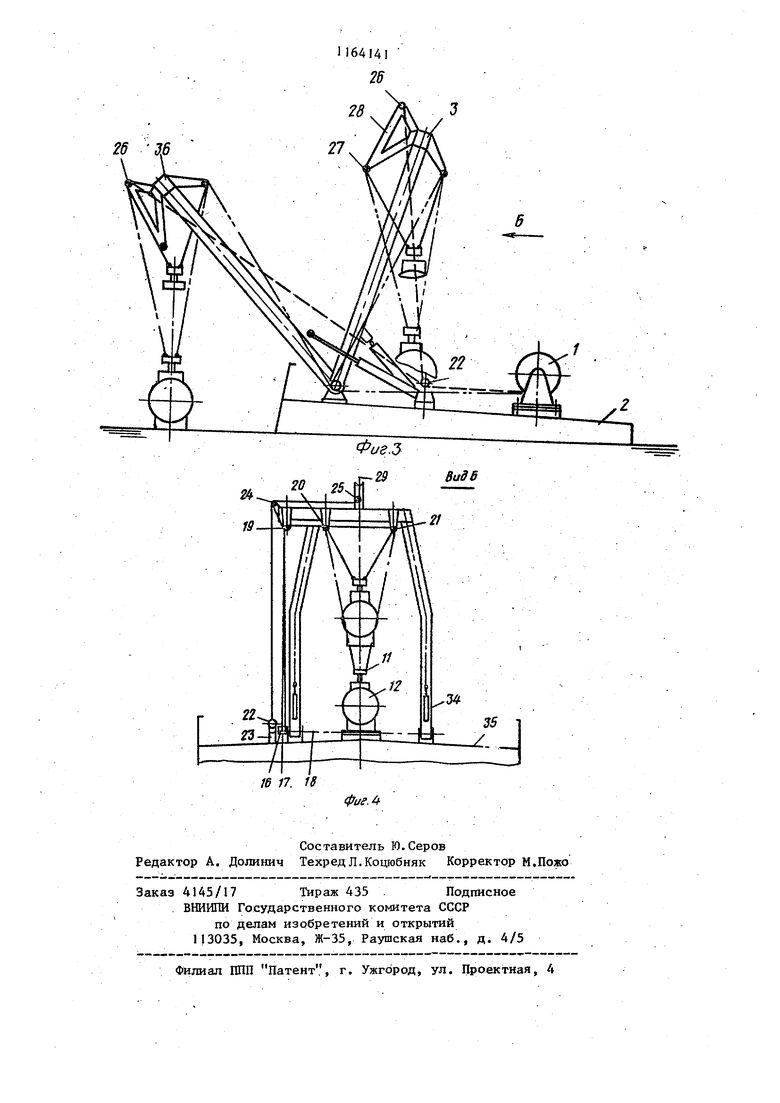
Изобретение относится к судостро ению, в частности к судовому грузов му устройству. Известно судовое грузовое ус-тройство, содержащее грузовую лебед ку и.шарнирно связанную с судном несущую раму с трехстропной грузо.вой подвеской,пропущенной через за крепленные на раме ролы Ij Недостатком известного устройст ва является то, что оно не обеспечивает работу при повышенной б льности моря. Цель изобретения - обеспечение работы при повышенной бальностимор путем сохранения пространственной формы подвески при наклонениях рамы между ее крайними положениями для размещения груза как над судном,та и за бортом его. Поставленная цель достигается тем, что в судовом грузовом устройстве, содержащем грузовую лебед и шарнирно связанную с судном несу щую раму с трехстропной .грузовой подвеской, пропущенной через закре ленные на раме ролы, несущая рама снабжена размещенным на ней дополнительным ролом, через который запасован один из стропов указанно подвески, при этом дополнительный рол и связанный с ним посредством этого стропа один из трех основных ролов выполнены с возможностью по . очередного взаимодействия с пропущенным через них стропом в крайних положениях несущей рамы, а устройс во снабжено системой уравнивания длин стропов при накренениях несущей рамы. Кроме того, упомянутая система уравнивания связана со стропом, пропущенным через дополнительный рол, и снабжена направляющим роло смонтированным на судне эксцентрич но относительно оси шарнира несущей рамы. На фиг.1 изображена кинематическая схема устройства; на фиг.2 вид А на фиг.1; на фиг.З - судно, оборудованное устройством, вид сбоку; на фиг.4 - вид Б на фиг.З. Грузовое устройство содержит грузовую лебедку 1 и шарнирно связанную с судном 2 несущую раму 3с нераскачиваемой трехстропной подвеской, стропы которой 4,5 и 6 образуют боковые ребра 7,8 и 9 соответственно правильной пирамиды с вершиной 10. К нижним концам стропов 4,5 и 6 прикреплен грузовой захват 11, удерживающий в процессе подъема-перемещения-спуска изделие 12.Каждый из стропов 4,5 и 6 закреплён на индивидуальной секции 13, 14 и 15 барабана грузовой лебедки I, при этом стропы 4,5 проведены от лебедки 1 к захвату 11 через рол 16 с двухручьевым шкивом 17, установленным на одной оси 18 с шарниром рамы 3, рол 19 с двухручьевым шкивом и через разнесенные в планеролы 20 и 21. Строп 6 проведен через направляющий рол 22, смонтированный на судовом фундаменте 23 эксцентрично относительно оси 18 Шарнира рамы 3, направляющие ролы 24,25 и дадее через рол 26 и дополнительный рол 27, смонтированные на обойме 28. Все ролы для тросов выполнены вращающимися на подшипника:. Рол 26 и дополнительный рол 27 смонтированы в плоскости .29, в которой-также расположен строп 6, соединенный с захватом 11. В казанной плоскости ролы 26,27 леат на условной окружности 30,центр которой 31 лежит на грани 32 основания 33, противоположной стропу 6. Перемещение рамы 3 производится гидоципиндрами 34. Элементы гидропривода (насосы, гидроаппаратура трубопроводы) на чертежах не показа ны. 3 . Устройство работает следующим об разом. В исходном положении изделие 12 храни.тся на палубе 35 судна 2. Рама 3 находится над изделием 12. Зах ват 11 cBHsaji с изделием 1 При включении на подъем лебедки 1 строп 4,5 и 6 наматываются на соответствующие секции 13,14 и 15 ее барабана и изделие 12 поднимается над палубой 35. Стропы 4,5 и 6 образуют ребра 7,8 и 9 правильной пирамидь и поэтому ограничивают раскачивание изделия 12. Дпя перемещения рамы в положение 36 над местом опускания изделия 12 в воду включают Гидросистему и гидроцилиндры 34 перемещают раму 3 и подвешенное к ней изделие. В этом положении строп 6 сходит на захват I1 с рола 26, зани мающего место дополнительного рола 27 в объемной -пирамиде в исходном положении рамы 3. Правильность формы пирамиды не нарушается ввиду того, что ролы 26 и 27 расположены ча условной окружности 30, центр
ВидА 14 которой 31 лежит на грани 32. При паремещений рамы 3 в положение 36 длина стропа 6 по сравнению с длиHOF стропов 4 и 5 будет увеличиватьс : зк ка троп 5 в исходном положении рагй.1 огибает оба рола 26 и 27, а Б конечном положении 36 только рол 26). В устройстве для компенсации увеличения длины стропа 6, по сравнению с неизменякмцимися дд{1 нами стропов 4,5 имеется . уравнивания стропов, содержащая на- tправляющий рол 22, установленный относительяо оси 18 с эксцентриситетом 37. В положений 36 происходит спуск изделия 12 на воду и отсоединение его от грузового захвата I1. Подъем и установка изделия 12 в первоначальное положение происходит в обратной последовательности. Таким образом, данное устройство за счет более простой конструкции позволяет производить груЗсвые операции при повышенной бальности моря.
| Устройство для уменьшения раскачивания груза судового крана | 1975 |
|
SU556078A1 |
| Способ приготовления сернистого красителя защитного цвета | 1915 |
|
SU63A1 |
