Изобретение относится к землеройным машинам, конкретно к рыхлителям с падающим клином.
Цель изобретения - повышение надежности.
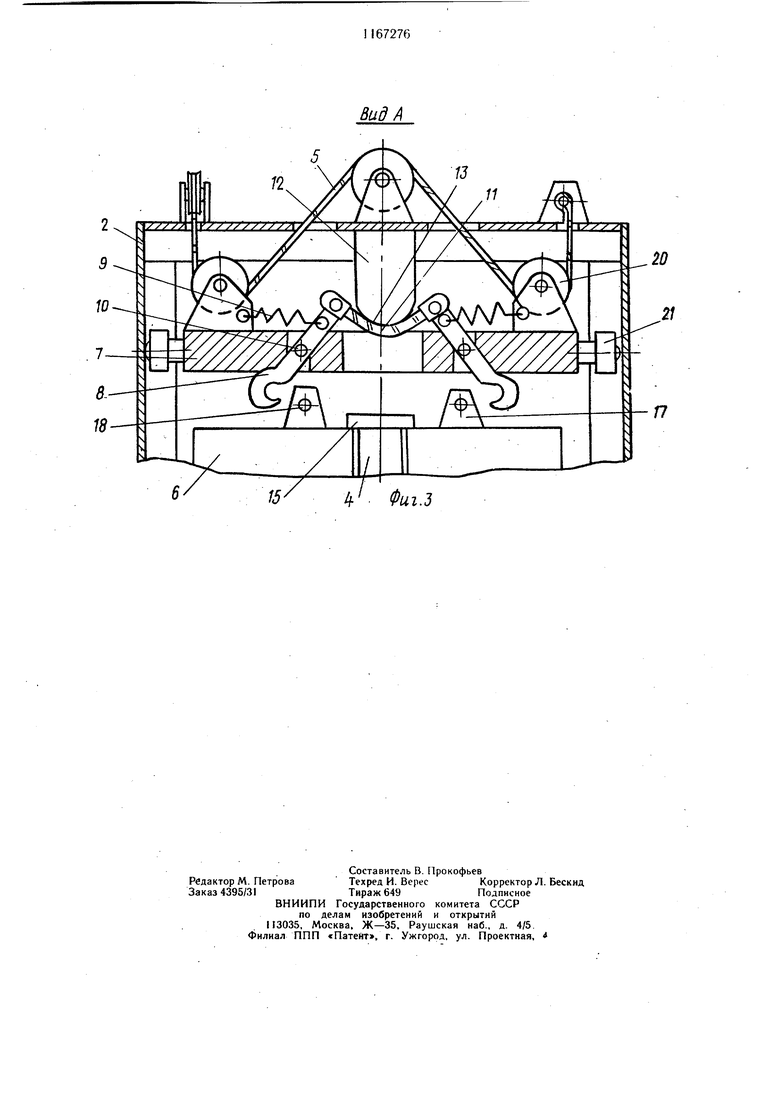
На фиг. I изображено устройство, общий вид; на фиг. 2 - вид А на фиг. I; (устройство в момент подъема рабочего органа); на фиг. 3 - то же, в момент освобождения крюковыми захватами ударного груза.
Устройство включает в себя базовую машину I с П-образной рамой 2, рабочий орган 3 с хвостовиком 4, механизм 5 подъема рабочего органа, ударный груз 6 траверсу 7 с крюковыми захватами 8 и пружинами 9. Захваты 8 шарнирно при помощи пальца 10 установлены в траверсе 7 и блокированы между собой гибкой связью 11. В верхней части рамы 2 симметрично установлен упор 12, имеющий в нижней части криволинейную поверхность 13. Хвостовик 4 снабжен фиксирующей гайкой 14 н ограничителем 15. Груз 6 имеет внутреннюю полость 16 и установленные в верхней части кронштейны 17 с упором 18, а траверса 7 снабжена отверстием 19 и блоками 20 механизма 5 подъема. Траверса 7 и груз 6 снабжены направляющими элементами 21. Устройство работает следующим образом.
Механизмом 5 подъема траверса 7 с грузом 6 и рабочим органом 3 перемещается вверх до контакта гибкой связи 11 с поверхностью 13 упора 12,- при этом направляющие элементы 21 перемещаются по направляющим рамы 2, а захваты 8 взаимодействуют с упорами 18. При дальнейшем перемещении вверх поверхность 13, воздей5 ствуя на гибкую связь 11, поворачивает захваты 8 вокруг оси 10, выводя их из зацепления с кронштейнами 17, и рабочий орган 3 с грузом 6 падает вниз, углубляясь за счет собственного веса в грунт на Р определенную глубину. Так как груз 6 снабжен полостью 16, то, падая вместе с рабочим органом 3, он, перемещаясь по хвостовику 4, ударяет по рабочему органу через определенный промежуток времени, сообщая последнему дополнительную энер15 гию и заглубляя его в грунт. Механизм 5 подъема включается на опускание и траверса 7, свободно падая, доходит до кронштейнов 17 груза 6, при этом захваты 8, раскрываясь с помощью пружин 9 надежно зацепляются с упорами 18. Механизм 5 подъема включается на подъем и траверса 7 перемещаясь вверх, посредством захвата 8 пер емещает груз 6 по хвостовику 4 вверх. Дойдя до ограничителя 15, груз 6 начинает перемещать рабочий орган 3 вверх 5 до контакта гибкой связи 11 с поверхностью 13, и процесс повторяется. Регулируя величину заворачивания хвостовика 4 в Теле рабочего органа 3, с помощью винта можно изменять высоту сброса груза 6, изменяя тем самым время запаздывания . и величину дополнительной эиергии, сообщаемой рабочему органу, повышая эффективность применения устройства.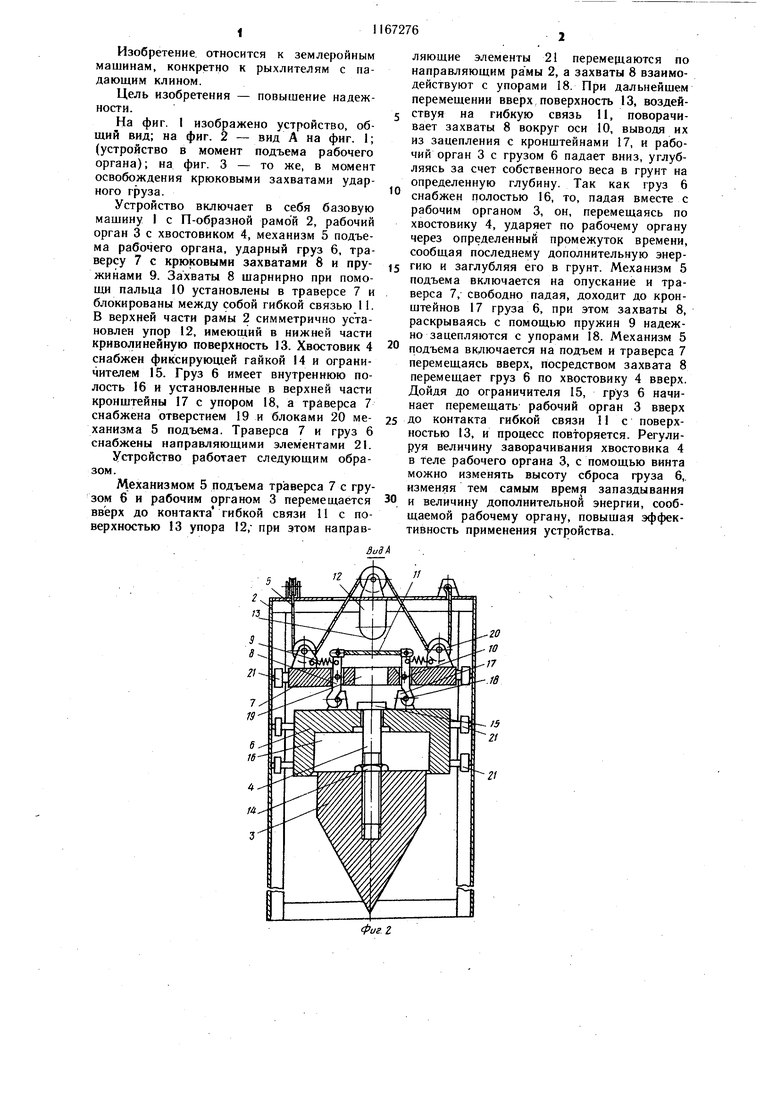
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для разработки высокопрочных грунтов | 1984 |
|
SU1170077A1 |
| Устройство для разработки грунтов | 1984 |
|
SU1283350A1 |
| Устройство для разработки высокопрочных грунтов | 1982 |
|
SU1040069A1 |
| Устройство для разработки грунта | 1987 |
|
SU1447998A1 |
| Установка для вытрамбовывания котлованов | 1987 |
|
SU1442611A1 |
| Устройство для разработки прочных грунтов | 1984 |
|
SU1159990A1 |
| Рыхлитель | 1979 |
|
SU909048A1 |
| Устройство для ударной разработки прочных грунтов | 1986 |
|
SU1384680A1 |
| Захватное устройство для грузов на поддонах | 1980 |
|
SU910524A1 |
| Устройство для разработки грунтов | 1986 |
|
SU1435715A1 |
1. УСТРОЙСТВО ДЛЯ РАЗРАБОТКИ ВЫСОКОПРОЧНЫХ ГРУНТОВ, включающее смонтированную на базовой машине П-образную раму с боковыми направляюшими и закрепленным между ними в верхней части упором, расположенную в боковых направляюших с возможностью перемещения траверсу с подпружи-; ненными поворотными крюковыми захватами, расположенный в боковых направляю;щих ударный груз с центральным отверстием и расположенными с возможностью взаимодействия с крюковыми захватами упорами, рыхлительный клин, хвостовик которого расположен .с возможностью вертикального перемещения в центральном отверстии ударного груза, и механизм подъема траверсы, отличающееся тем, что, с целью повышения надежности устройства, хвостовик соединен с рыхлительным клином с возможностью фиксированного переме щения относительно него и имеет расположенный в верхней части ограничитель перемещения ударного груза, при этом поворотные крюковые захваты соединены между собой посредством гибкой связи, расположенной с возможностью взаимодействия с упором П-образной рамы. 2.Устройство по п. 1, отличающееся тем, что поверхность контакта упора П-образной рамы с гибкой связью выполнена криволинейной. 3.Устройство по пп. 1 и 2, отличающееся тем, что уданый груз выполнен с внутренней- полостью для перемещения в ней рыхлительного клина.
| 0 |
|
SU160113A1 | |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Счетная таблица | 1919 |
|
SU104A1 |
| кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
