| |
Изобретение относится к дорожному и строительному машиностроению, в частности к механизмам для ударной разработки высокопрочных грунтов, в том числе и мерзлых.
Цель изобретения - повышение производительности устройства.
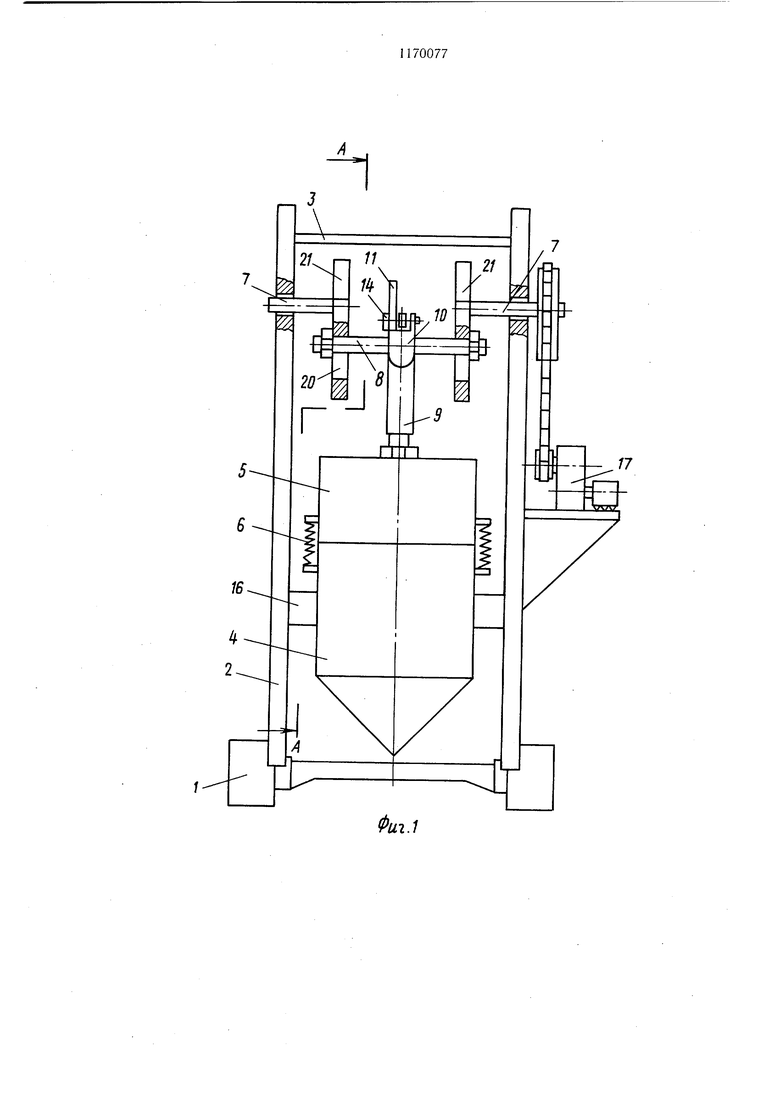
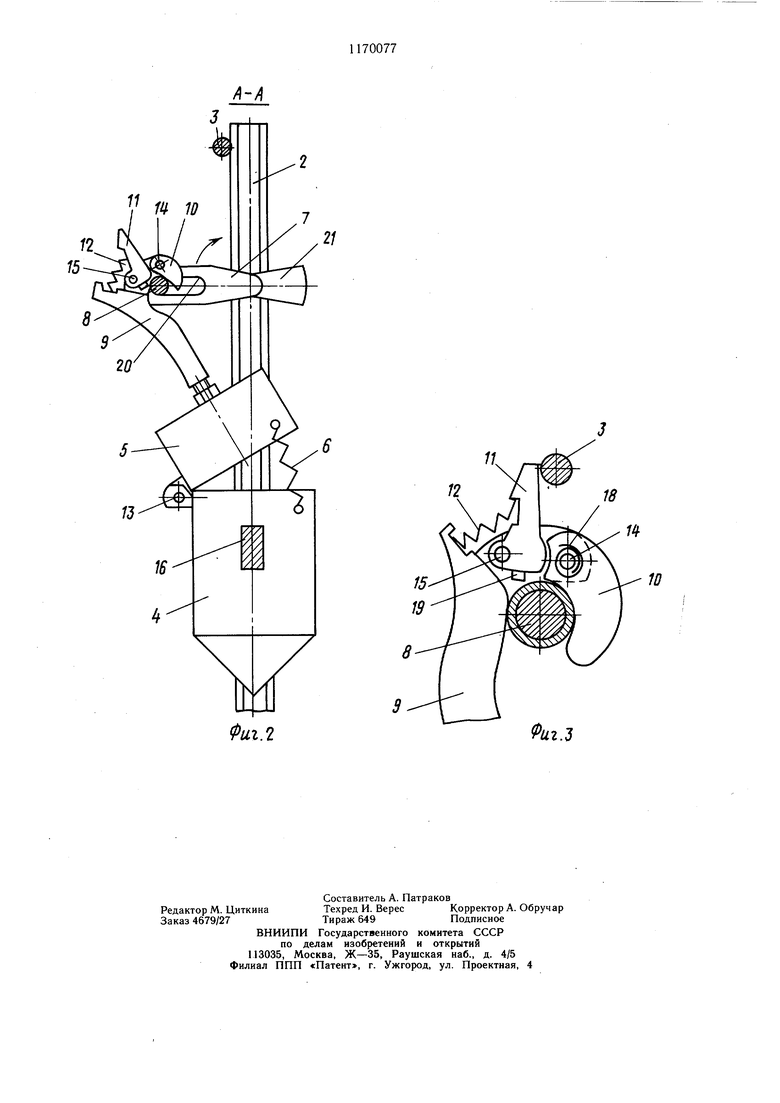
На фиг. 1 изображено устройство, общий вид; на фиг. 2 - разрез А-А на фиг. 1 (во время подъема рабочего органа); на фиг. 3 - крюковой захват в момент контакта с упором.
Устройство включает в себя базовую машину 1, вертикальную направляющую раму 2, упор 3, клиновой рабочий орган 4, дополнительный груз 5 с пружинами 6, коленчатый вал 7 с пальцем 8, неподвижная 9 и подвижная 10 части крюкового захвата, трехплечий рычаг 11 с пружиной 12. Дополнительный груз 5 шарнирно установлен на рабочем органе 4 посредством оси 13, подвижная 10 и неподвижная 9 части захвата шарнирно связаны между собой при помощи оси 14, а трехплечий рычаг И шарнирно установлен на неподвижной части 9 захвата при помощи оси 15. Рабочий орган 4 снабжен ползунами 16, перемещаемыми по направляющим рамы 2. Вал 7 приводится во вращение приводом 17. Подвижная часть 10 крюкового захвата снабжена пружиной 18, жестко связанной с неподвижной частью 9 захвата, причем на неподвижной части захвата закреплен ограничитель 19. Вал 2 снабжен пазами 20, в которых установлен палец 8, а неподвижная часть 9 захвата крепится на резьбе к дополнительному грузу 5. Для облегчения подъема рабочего органа 4 коленчатый вал 7 снабжен противовесом 21. Рабочий орган 4 выполнен в виде рыхлительного клина, а подвижная часть 10 захвата - в виде двухплечего рычага.
Устройство работает следующим образом.
Рама 2 устанавливается на грунт, и приводом 17 коленчатый вал 7 приводится во вращение. Вращаясь, вал 7 пальцем 8 контактирует с крюковым захватом и перемещает рабочий орган 4 вверх, при этом дополнительный груз 5 поворачивается на оси 13 до того момента, когда вал 7 достигнет верхней точки, а рычаг 11 дойдет до упора 3. При дальнейщем повороте вала 7 рычаг 11,
контактируя с упором 3, поворачивается на пальце 15 относительно неподвижной части 9 крюкового захвата, выходя из контакта с подвижной частью 10 захвата, при этом подвижная часть 10 захвата при дальнейщем вращении вала 7 поворачивается на
пальце 14, выходя из зацепления с пальцем 8, и рыхлительный клин 4 с грузом 5, свободно падая, внедряется в разрабатываемый грунт, при этом подвижная часть 10 захвата под действием пружины 18 возвра- щается в исходное положение, а пружина 12 поворачивает рычаг 11 до ограничителя 19, и рычаг входит в зацепление с подвижной частью 10 захвата. Коленчатый вал 7, продолжая вращаться, доходит до нижней точки поворота и палец 8 входит в зацепление с крюковым захватом, после чего процесс повторяется.
Прямолинейное перемещение рыхлительного клина 4 происходит благодаря направляющей 16, контактирующей с направляющей рамой 2. Поворот дополнительного груза 5 происходит вследствие того, что вал 7 вращается по радиусу, а клин 4 перемещается прямолинейно. Пружина 6 надежно прижимает дополнительный груз 5 к клину 4
при ударе о грунт. Пазы 20 и резьбовое крепление неподвижной части 9 крюкового захвата необходимы для регулирования высоты сброса рыхлительного клина 4 и глубины внедрения его в грунт.
2/.
11 /4
п
/
- 6
16i
17
3fc./
Фиг.1
//,
п
.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для разработки высокопрочных грунтов | 1982 |
|
SU1040069A1 |
| Устройство для разработки высокопрочных грунтов | 1984 |
|
SU1167276A1 |
| Устройство для разработки грунта | 1987 |
|
SU1447998A1 |
| УСТРОЙСТВО ДЛЯ РЫХЛЕНИЯ ПРОЧНЫХ ГРУНТОВ | 1991 |
|
RU2018584C1 |
| СПЕЦИАЛЬНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 1991 |
|
RU2025327C1 |
| Грузоподъемный кран | 1980 |
|
SU931681A2 |
| Агрегат для изготовления посадочных площадок на склонах | 1980 |
|
SU917716A1 |
| СМЕННОЕ ОБОРУДОВАНИЕ К ТРАКТОРУ ДЛЯ РАЗРАБОТКИ МЕРЗЛЫХ ГРУНТОВ | 1964 |
|
SU165135A1 |
| Захватное устройство | 1986 |
|
SU1395580A1 |
| Устройство для разработки грунтов | 1986 |
|
SU1435715A1 |
УСТРОЙСТВО ДЛЯ РАЗРАБОТКИ ВЫСОКОПРОЧНЫХ ГРУНТОВ, включающее базовую машину, вертикальную направляющую раму, установленный на ней свободно падающий клиновой рабочий орган с элементами сцепки, механизм подъема и узел автоматического управления сбросом рабочего органа, отличающееся тем, что, с целью повыщения производительности устройства, механизм подъема выполнен из коленчатого вала, кривощип которого, состоящий из жестко связанных посредством пальца щек, установлен с возможностью периодического взаимодействия с элементами сцепки рабочего органа, при этом последние выполнены из дополнительного груза и жестко установленного на нем крюкового захвата, крайняя часть крюка которого выаолнена подвижной в виде двуплечего рычага, щарнирно прикреплена к неподвижной части крюка и подпружинена относительно нее, а дополнительный груз нижней частью щарнирно прикреплен к верхней части рабочего органа, при этом узел автоматического управления сбросом рабочего органа выполнен из закрепленного в верхней части рабочего упора, из трехплечего рычага, щарнирно установленного одним нижним плечом на неподвижной части крюка захвата с возмож- о ностью взаимодействия верхним и другим (О нижним плечами соответственно с упором и одним из концов двуплечего рычага, причем трехплечий рычаг подпружинен относительно неподвижной части крюка и имеет ограничитель перемещения.
| Устройство для разработки высокопрочных грунтов | 1982 |
|
SU1040069A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
