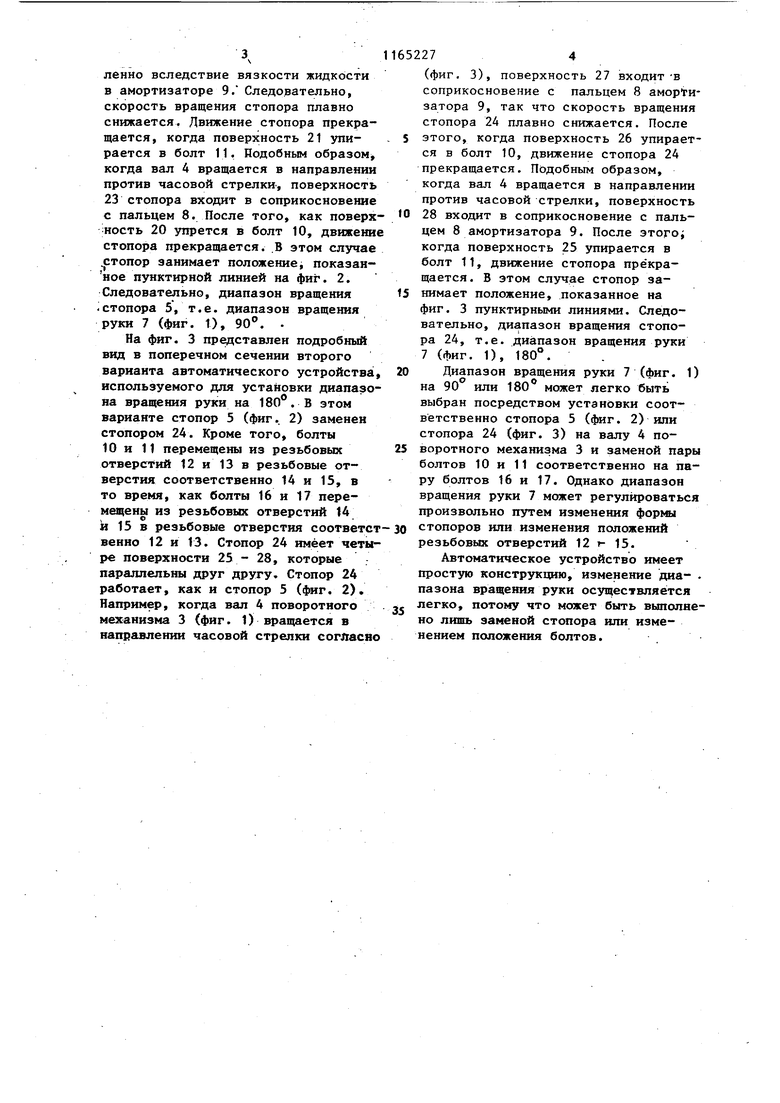
Изобретение относится к авТомати ческой механической системе, а имен но робототехнике. Известно автоматическое устройство, содержащее плечо, несущий корпус, прикрепленный к одному концу плеча, поворотный механизм, смон тированный на конце несущего корпуса, запястье, установленное с возможностью вращения на поворотном механизме, руку, прикрепленную к запястью, заменяемый стопор, соединенный с поворотным механизмом и расположенный внутри несущего корпу са с возможностью поворота вместе с поворотным механизмом, два статических элемента, расположенных внутри несущего корпуса с возможностью контакта с заменяемым стопором, причем статические элементы содержат болты, установленные в резьбовых отверстиях, вьшолненных в несущем корпусе р1. Недостатком известного автоматического устройства является сложность конструкции. Цель изобретения - упрощение кон струкции. По первому варианту изобретения для достижения указанной цепи автоматическое устройство содержит амортизатор, прикрепленный к несущему корпусу для замедления скорости вращения поворотного механизма, причем заменяемый стопор имеет четы ре рабочие поверхности для упора в две стороны амортизатора и в два статических элемента, из которых пе вая и четвертая поверхности, а также вторая и третья - параллельны между собой, а первая и вторая (третья и четвертая) перпендикулярн друг другу. По второму варианту изобретения для достижения указанной цепи авто матическое устройство содержит амор тизатор, прикрепленный к несутцему корпусу для замедления скорости вращения поворотного механизма, причем заменяемый стопор имеет четы ре параллельные друг другу рабочие поверхности. На фиг. 1 дано автоматическое устройство, вид в перспективе; на фиг. 2 - первый вариант исполнения автоматического ycтpoйcтвaj поперечны разрез; на фиг. 3 - второй вариант исполнения автоматического устройства, поперечный разрез. Автоматическое устройство состоит из плеча 1, несущего корпуса 2, установленного на конце плеча 1, и поворотного механизма 3, неподвижно прикрепленного к несущему корпусу 2. Поворотный механизм 3 представляет собой механизм, которьй приводится в действие давлением воздуха или жидкости. На валу 4 поворотного механизма 3 установлен стопор 5 и цапфа 6 с рукой 7. Поэтому, когда вал 4 поворотного механизма 3 вращается, рука 7 и стопор 5 также вращаются (см. стрелку А). В результате, когда вал 4 вращается, стопор 5 входит в соприкосновение с пальцем 8 амортизатора 9, в котором палец 8 соединен с диском, находящимся в жидкости амортизатора 9. После этого стопор 5 упирается в один из болтов 10 или 11, установленных в корпусе 2. Амортизатор 9 используется для плавного снижения скорости вращения вала 4. Вариант исполнения на фиг. 2 используется для установки див пазона вращения руки 7 на 90 . Несущий корпус 2 содержит одну пару резьбовых отверстий 12 и 13 и вторую пару резьбовых отверстий 14 и 15 соответственно под болты 10, 11, 16 и 17. Болты 10 и 11 снабжены гайками 18 и 19 для установления положений остановки стопора 5. Несущий корпус 2 снабжен также парой болтов. Болты 16 и 17 предназначены для закупоривания резьбовых отверстий соответственно 14 и 15. Стопор 5 по первому варианту исполнения имеет четьфе поверхности 20 из которых поверхности 20 и 21 используются для упора в болты соответственно 10 и 11, а поверхности 22 и 23 - для упора в палец 8 амортизатора 9. Поверхности 20 и 22 параллельны друг другу и перпендикулярны поверхностям 21 и 23, которые парал-пельны между собой. Стопор 5 работает следующим образом. Когда вал 4 поворотного механизма 3 (фиг. 1) вращается в направлеции часовой стрелки согласно, то поверхность 22 стопора 5 входит в соприкосновение с пальцем 8 амортизатора 9 В этом случае палец перемещается вправо относительно мел
ленно вследствие вязкости жидкости в амортизаторе 9. Следовательно, скорость вращения стопора плавно снижается. Движение стопора прекращается, когда поверхность 21 упирается в болт 11. Подобным образом когда вал 4 вращается в направлении против часовой стрелки-, поверхность 23 стопора входит в соприкосновение с пальцем 8. После того, как поверх:ность 20 упрется в болт 10, движение стопора прекращается. .В этом случае стопор занимает положение, показанное пунктирной линией на фиг. 2. Следовательно, диапазон вращения .стопора 5, т.е. диапазон вращения руки 7 (фиг. 1), 90°.
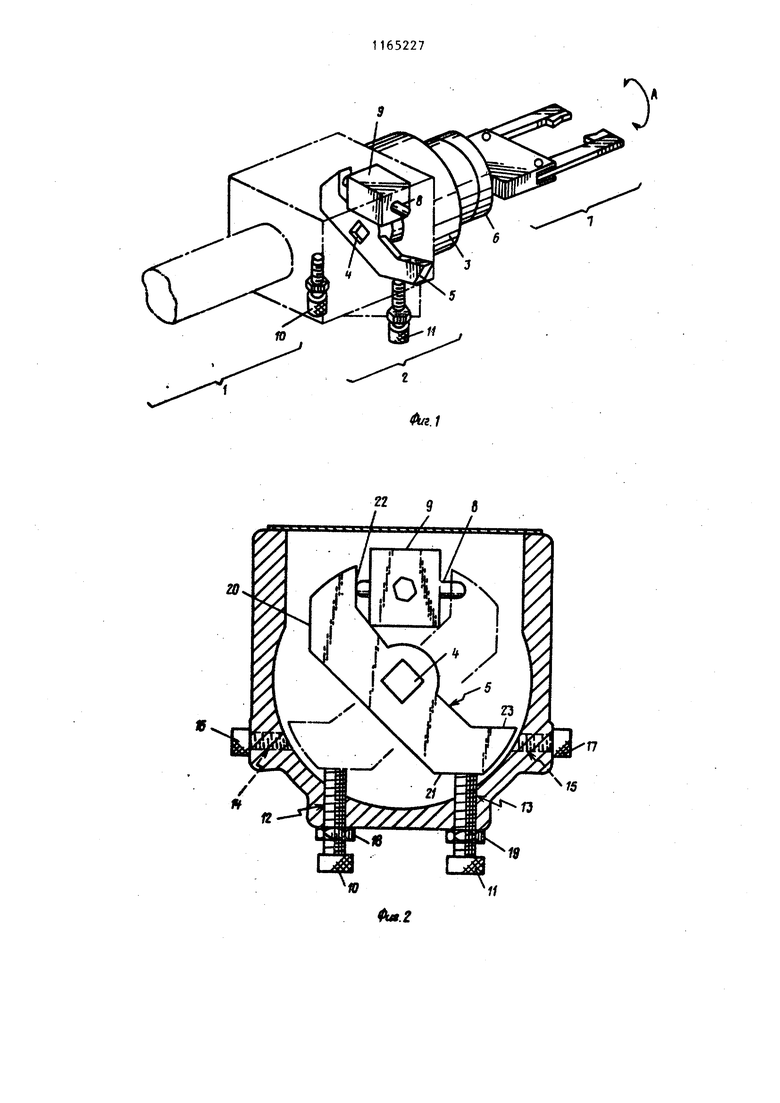
На фиг. 3 представлен подробный вид в поперечном сечении второго варианта автоматического устройства, используемого для установки диапазона вращения руки на 180°. В этом варианте стопор 5 (фиг.. 2) заменен стопором 24. Кроме того, болты 10 и 11 перемещены из резьбовых отверстий 12 и 13 в резьбовые отверстия соответственно 14 и 15, в то время, как болты 16 и 17 перемещены из резьбовых отверстий 14 и 15 в резьбовые отверстия соответственно 12 и 13. Стопор 24 имеет четыре поверхности 25 - 28, которые параллельны друг другу. Стопор 24 работает, как и стопор 5 (фиг. 2). Например, когда вал 4 поворотного механизма 3 (фиг. 1) вращается в направлении часовой стрелки согласяо
652274
(фиг, 3), поверхность 27 входит-в соприкосновение с пальцем 8 амортизатора 9, так что скорость вращения стопора 24 плавно снижается. После 5 этого, когда поверхность 26 упирается в болт 10, движение стопора 24 прекращается. Подобным образом, когда вал 4 вращается в направлении против часовой стрелки, поверхность
10 28 входит в соприкосновение с пальцем 8 амортизатора 9. После этого когда поверхность 25 упирается в болт 11, движение стопора прекращается. В этом случае стопор занимает положение, показанное на фиг. 3 пунктирными линиями. Следовательно, диапазон вращения стопора 24, т.е. диапазон вращения руки 7 (фиг. 1), 180°.
20 Диапазон вращения руки 7 (фиг. 1) на или 180 может легко быть выбран посредством установки соответственно стопора 5 (фиг. 2) ипи стопора 24 (фиг. 3) на валу 4 поворотного механизма 3 и заменой пары болтов 10 и 11 соответственно на пару болтов 16 и 17. Однако диапазон вращения руки 7 может регулироваться произвольно путем изменения форьел 30 стопоров или изменения положений резьбовых отверстий 12 i- 15.
Автоматическое устройство имеет простую конструкцию, изменение диа- . пазона вращения руки осз ествляётся легко, потому что может быть выполнено лишь заменой стопора или изменением положения болтов.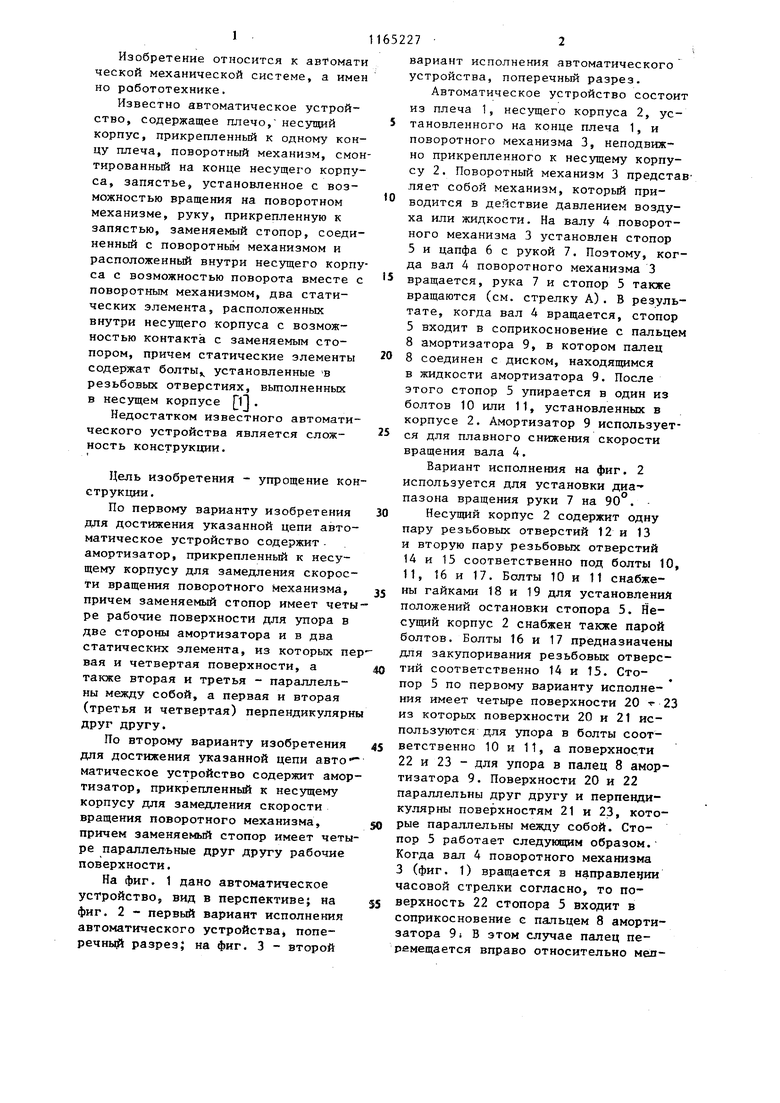
| название | год | авторы | номер документа |
|---|---|---|---|
| Промышленный робот | 1981 |
|
SU1149860A3 |
| Кисть промышленного робота | 1982 |
|
SU1168090A3 |
| Управляемая рука промышленного робота | 1981 |
|
SU1087060A3 |
| Устройство для последовательной подачи заготовок к схвату робота | 1982 |
|
SU1299490A3 |
| Кисть механической руки | 1982 |
|
SU1179913A3 |
| Промышленный робот | 1982 |
|
SU1331420A3 |
| Кисть манипулятора со стыковочным устройством | 1982 |
|
SU1304742A3 |
| Система управления для остановки шпинделя в определенном угловом положении | 1980 |
|
SU1308185A3 |
| Промышленный робот | 1980 |
|
SU1279521A3 |
| Металлорежущий станок с автоматической сменой инструмента | 1978 |
|
SU727119A3 |
1. -Автоматическое устройство, содержащее плечо, несущий корпус, прикрепленный к одному концу плеча, поворотный.механизм, смонтированнь1й на конце несущего корпуса, запястье, установленное с возможностью вращения на поворотном механизме, руку, прикрепленную к запястью, заменяемый стопор, соединенный с поворотным механизмом и расположенный внутри несущего корпуса с возможностью поворота вместе с поворотным механизмом, статических элемента, расположенных внутри несущего корпуса с возможностью контакта с заменяемый стопором, причем статические элемен- ты содержат болты, установленные в . резьбовых отверстиях выполненных в несущем корпусе, отличающееС я тем, что, с целыо упрощения .конструкции-, оно содержит амортиэа,тор, прикрепленный к несущему корпу су для замедления скорости вращения поворотного механизма, причем заменяемый стопор имеет четыре рабочие поверхности для упора в две сторо- ны амортизатора и в два статических элемента, из которых первая и четвертая поверхности, а также вто рая итретья - параллельны между собой а первая и вторая {третья и четвертая) перпендикулярны другдругу. 2. Автоматическое устройство, содержащее плечо, несущий корпус,прикрепленный к одному концу плеча,поворотный механизм,смонтированный на конце несущего корпуса, запястье,установленное с возможностью вращения на пово рот ном механизме, руку, прикрепленную (Л к запястью, заменяемьлй стопор, соединенный с поворотным механизмом и расположенный внутри несущего корпуса с возможностью поворота вместе . с поворотным механизмом, два статических элемента, расположенных внутри несущего корпуса с возможностью Од контакта с заменяемым стопором, приСП чем статические злемеиТы содержат бол,- ю ю м ты, установленные в резьбовых отверстиях, выполненных в несущем корпусе, отличающееся тем, что, с целью упрощения конструкции, оно содержит амортизатор, прикрепленный к несущему корпусу для замедления скорости вращения поворотного механизма, причем заменяемый стопор имеет четырепараллельные друг другу рабочие поверхности.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Манипулятор | 1977 |
|
SU611774A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
