:,2.Манипулятор по п.1,о т л и - скалок,
ч а ю щ и ii с я тем, что кронштейн .связан с гндроцилиндром телескопической руки с помощью двух направляющих
1168310
в которых вьшолнены каналы для подвода энергоносителя к гидроцилиндру захвата iруки.
| название | год | авторы | номер документа |
|---|---|---|---|
| Привод волочильного барабана | 1982 |
|
SU1072944A1 |
| ТРУБОВОЛОЧИЛЬНЫЙ СТАН БАРАБАННОГО ТИПА ДЛЯ БУХТОВОГО ВОЛОЧЕНИЯ ТРУБ | 1968 |
|
SU212963A1 |
| АГРЕГАТ ДЛЯ БУХТОВОГО ВОЛОЧЕНИЯ ТРУБ | 1972 |
|
SU335027A1 |
| СТАН ДЛЯ ПОЛУЧЕНИЯ ОВАЛЬНЫХ ПРОФИЛЬНЫХ ТРУБ | 2007 |
|
RU2337778C1 |
| ТРУБОВОЛОЧИЛЬНЫЙ СТАН БАРАБАННОГО ТИПА ^'•••^^Ч|3'''сКЛ ДЛЯ БУХТОВОГО ВОЛОЧЕНИЯ- - - - | 1965 |
|
SU174164A1 |
| Волочильный барабан | 1981 |
|
SU1068196A1 |
| Накопитель к волочильному стану | 1974 |
|
SU483165A1 |
| Поточная линия для бухтового волочения труб | 1983 |
|
SU1235586A1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ТОНКОСТЕННЫХ ТРУБ ИЗ МЕДИ И ЕЕ СПЛАВОВ | 2003 |
|
RU2230624C1 |
| Стан бухтового волочения труб | 1984 |
|
SU1210936A1 |
1. БУХТОСЪЕМНЫИ МАНИПУЛЯТОР ТРУБОЮЛОЧИПЬНОГО СТАНА С ВЕРТЙКАЛЬНШ БАРАБАНОМ, содержаний стойку, шарнирно сопряженную с горизонтальной поворотной рукоятью, на которой уста новлена тарель бухтоприемного устрой-. ЭСЕСОЮЗЗЛЯ ЕАТ ;;.:::-г. TEIft::i4;.;i.;ifAS БИБЛИОТЕКА ства вертикальную телескопическую руку, составной гцдрохщлиндр с захватом для трубы, тгриводную систему, отличающийся тем, что, с целью сокращеш1я ручного труда при обслуживании стана путем автоматического ориентирования конца трубной заготовки, он снабжен кронштейном, закрепленньм на телескопической руке, гидрощшиндром для привода захвата, датчиком положения трубы, установленными на кронштейне, и дополнительным приводом для вращения тарели бухтоприемного устройства, размещенным на рукояти, причем захват руки выполнен в виде двух пар параллельно расположенных и шарнирно связанных с кронштейном клещей, одна из которых снабжена ножевьлм фиксатором трубы, управляемым от гидроциливдра для захвата трубы. О) 00 00
I
Изобретение относится к оборудованию для бухтового волочения труб, преимущественно из цветных металлов.
Целью изобретения является сокращение ручного труда при обслуживании стана путем автоматического ориентирования конца трубной заготовки.
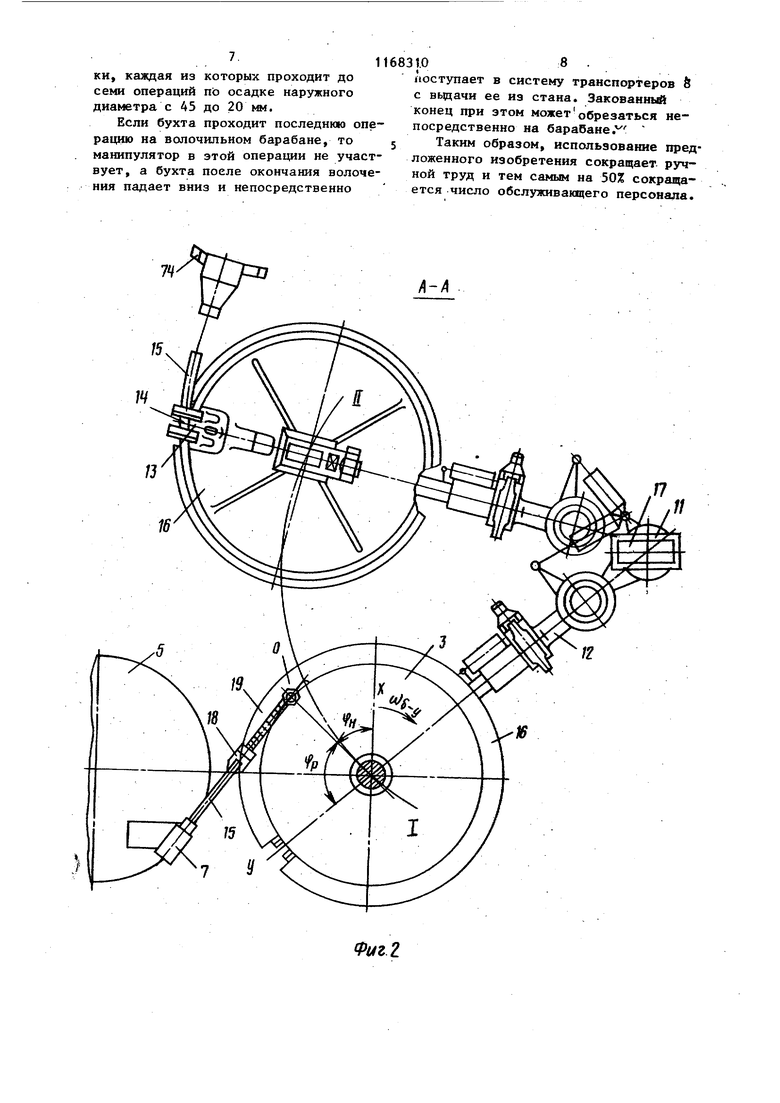
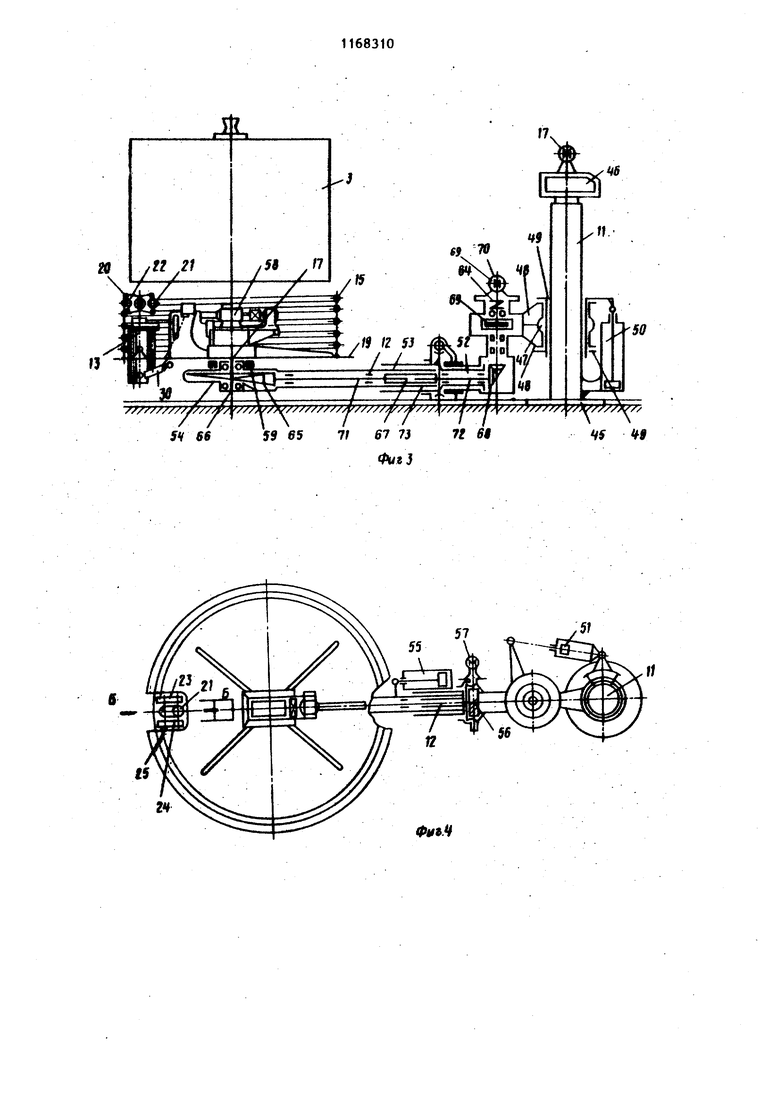
На фиг.1 изображен манипулятор в комплексе с трубоволочильным станом, общ1 вид; на фиг.2 - двухпозиционное положение манипулятора (сечение А-А
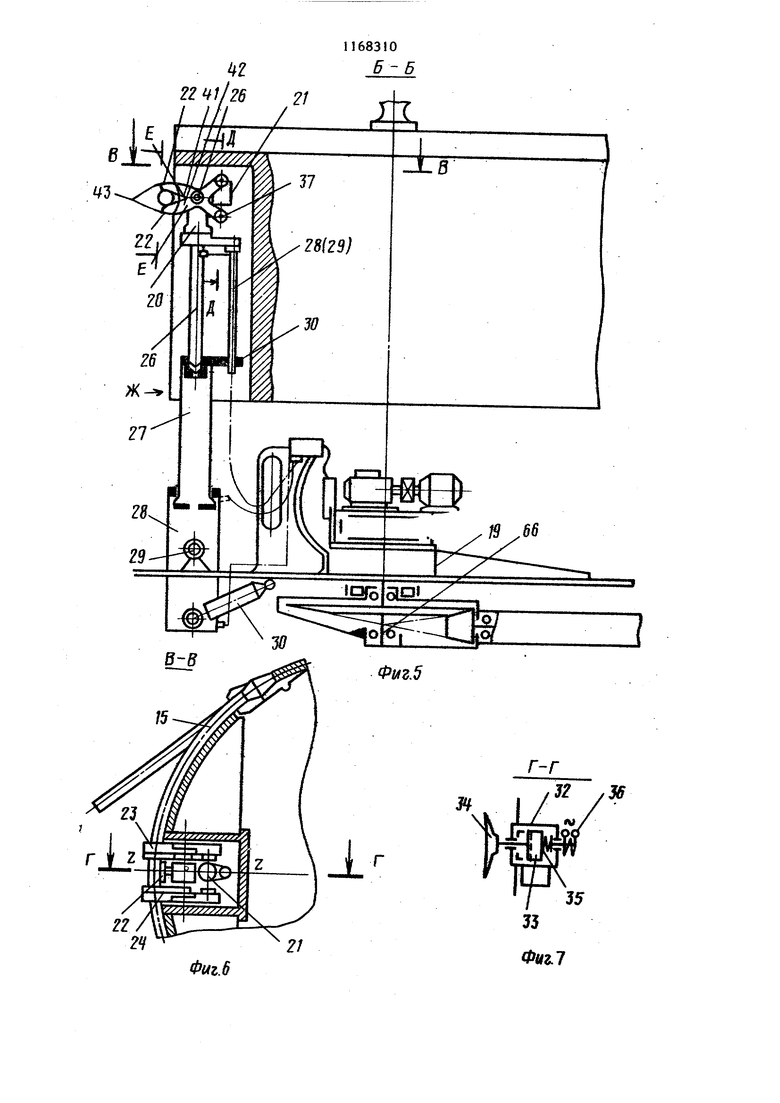
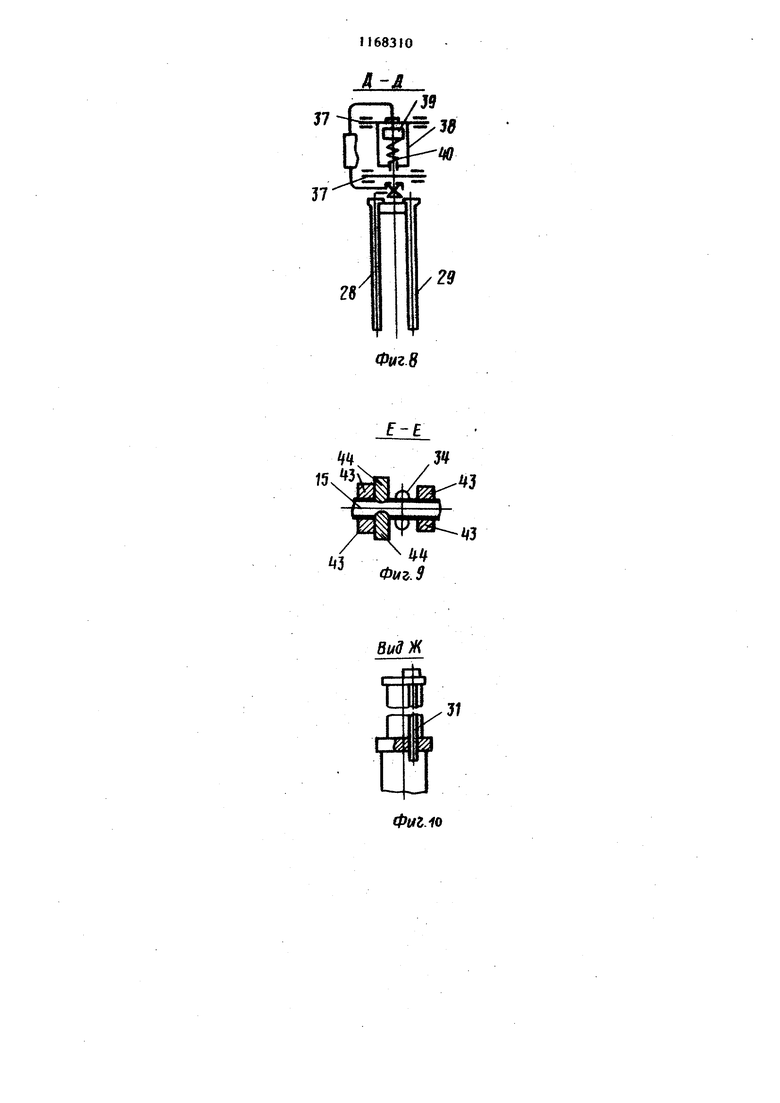
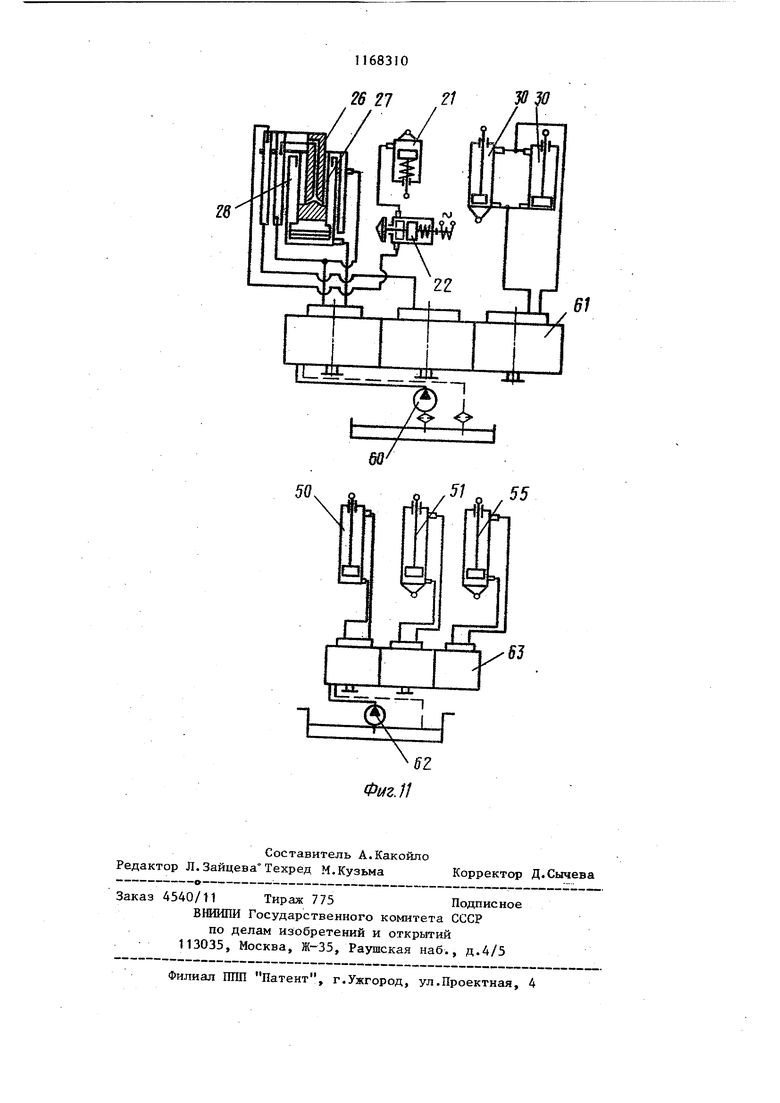
на фиг.1); на фиг.З - принципиальная схема манипулятораi на фиг.4 - принципиальная схема манипулятора (вид сверху на фиг.З); на фиг.5 - принципиальная схема телескопической руки с бухтоприемньм устройством, сечение Б-Б на фиг.4} на фиг.6 - сечение В-В на фиг.5 i на фиг.7 - схема датчика положения трубы (разрез Г-Г на фиг.б) на фиг.8 - схема приводного цилиндра захвата руки с направляющими скалками (разрез Д-Д на фиг.З); на фиг.9 - клещевой захват (разрез Е-Е на фиг.З) на фиг.10 - общий вид сопряжения промежуточного и опорного гидроцилиндров (вид Ж на фиг.З); на фиг.11 - принципиальная гидравлическая схема привода бухтоприемного устройства и рычажной системы манипулятора.
Предложенный манипулятор 1 установлен в комплексе с трубоволочильным станом 2, BKJBoxiaM iM вертикальный барабан 3 с верхним расположением привода 4, размоточное устройство 5 трубной заготовки 6, волоку 7 с возможностью вертикального перемещения, систему транспортеров 8, бухюнакопитель 9 и комплекс устройств 10 для технического обслуживания стана, т.е. выполнения подготовительно-вспомогательных операций (фиг.1).
Манипулятор 1 содержит параллельную образующей вертикального барабана 3 стойку И, шарнирно сопряженную
с горизонтальной поворотной рукоятью 12, вертикальную телескопическую руку 13, представленную в виде составного гидроцилиндра с захватом 14 трубы 13, снабженную бухтоприемным устройством 16 для соединения с рукоятью, а также приводную систему 17. Волочильный барабан 3 снабжен клещевым захватом 18 трубы 13 на цепной поддержке. Бухтоприемное устройство 16 представлено в виде тарели 19 (фиг.1 и 2).
Захват 14 манипулятора 1 вьшолнен в виде кронштейна 20 с приводным цилиндром 21 с датчиком.22 положения трубы 13, двух параллельно расположенных клещей 23 и 24, связанных с кронштейном шарниром 23. В оболочке барабана 3 имеется продольный вырез для размещения в нем руки 13 (фиг.26).
Вертикальная телескопическая рука 13 (фиг.) представляет собой роставной гидроцилиндр, образованный выходным гидроцилиндром 26, последующим промежуточным цилиндром 27 и опорным цилиндром 28. Кронштейн 20 захвата 1 закрытый на выходном цилиндре 26. Опорный цилиндр 28 закреплен на тарели 19 посредством шарнира 29 и двух гидроцилиндров 30 наклона телескопической рукояти. Кронштейн 20 связан с промежуточным цилиндром 27 двумя направляющими скалками 28 и 29, сопряженными по посадке движения с кронштейном 30 цилиндра 27. Скалки 28 и 29 выполнены полыми (фиг.8). Гидроцилиндр 27 также связан с опорным гидроцилиндром 28, ползуном 31 (фиг.10).
Датчик 22 положения трубы 13 (фиг.7) состоит из двухпозиционного золотника 32 и плунжера 33 с пятой 34, пружины 33 и электромагнита 36. Приводной гидроцилиндр 21 (фиг.З шарнирно связан с клещами 23 и 24 3 осями 37 и состоит из корпуса 38 и плунжера 39 и пружины 40 (фиг.8). Клещи 23 и 24 состоят из рычагов 41 и 42, снабженных губками 43 и ося ми 37 (фиг.4, 5 и 9). Клещи 23 снабжены фиксатором трубы, состоящим из двух ножей 44, прикрепленных к губкам 43 (фиг.9). Вертикальная стойка 11 (фиг.З) ма нипулятора 1 имеет круглое сечение и закреплена на фундаменте стана 45. Наверху стойки смонтирован гидропри вод 46 подъема-опускания, поворота и радиального перемещения манипулятора Для шарнирного сопряжения со стой кой 11 горизонтальная рукоять 12 снабжена переходником 47, состоящим из поворотного корпуса 48, установленного на втулке 49, соединенной со стойкой гидроцилиндром 50. Втулка 49 связана с поворотным корпусом 48 гидроцилиндром 51 (фиг.4). Кроме переходника 47 рукоять 12 содержит сопряженную с переходником 47 поворотную трубу 52 и установленную в ней вьщвижную пиноль 53 с корпусом 54. Пиноль связана с поворотной трубой гидроцилиндром 55 (фиг.4) Переходник 47 связан с поворотной трубой 52 червячным редуктором 56, приводимым в движение электродвигателем 57 (фиг.4). Приводная система 17 манипулятора состоит из гидропривода 46 подъемаопускания манипулятора с помощью гид роцилиндра 50, поворота в горизонтальной плоскости с помощью гидроцилиндра 51, радиального перемещения с помощью гидроцилиндра 55 и механизма поворота в вертикальной плоскости с помощью редуктора 56 и электродвигателя 57 (фиг.З и 4). Кроме того, в приводную систему входит электропривод 58 управления вертикальной телескопической рукой |13, установленной на тарели 19 бухтоприемного устройства 16. Электропривод 58 связан с электросетью посредством токосъемника 59 (фиг.1 и 3). Гидроцилиндры 26-28, 21 и 30 и датчик 22 положения трубы питаются насосом 60 через клапанно-распределительную коробку 61, а гидроцилиндры 50, 51 и 55 - от насоса 62 через клапанно-распределительную коробку 63 Приводная система 17 содержит так же дополнительный привод 64 автоном104ного вращения бухтоприемного ycTpoiPства 16 вокруг его вертикальной оси. Этот привод состоит из конического редуктора 65, на выходном валу 66 которого закреплена тарель 19, входного телескопического вала 67, конического . редуктора 68, электромагнита ной сцепной фрикщюнной муфты 69 и электродвигателя 70 серийного типа со встроенным электромагнитным roipмозом нормально-замкнутого типа. Редуктор 65 размещен в корпусе 54 выдвижной пиноли 53, а редуктор 68 в корпусе 48 переходника 47.Телеско-: пический вал 67- состоит из соосных валов 71 и 72 и шлицевой муфты 73. Подвод рабочей жидкости к выходному гидроцклиндру 26, датчику 22 положения и гидроцилиндру 21 обес- печивается через полые скалки 28 и 29. Подвод рабочей жидкости к скалкам к остальным гидроцилиндрам обеспечивается гибкими шлангами (фиг.3-5). Манипулятор 1 технологически связан с линией 74 для производства подготовительно-вспомогательных операций, т.е. подготовки бухты к волочению (фиг.1 и 2). Предложенный манипулятор работает следующим образом. В исходном положении вертикальный волочильный барабан 3 ориентируется и фиксируется волочильщиком как и при обычной технологии, в положении I (фиг.2) так, что положение опорной точки О клещевого захвата 18 (цепной поддержки) определяется углом f относительно оси XX. В этом положении ос тцествляется нормальный захват (зажим) заостренного конца трубы 15. При этом тарель 19 бухтоприемного устройства 16 ориентирована относительно барабана 3 углом i/ . Это положение фиксировано посредством конического редуктора 68, электромагнитной сцепной фрикционной муфты 69 и электродвигателя 70 серийного типа со встроенным электромагнитным тормозом так, что ось ZZ клещевого захвата ,14 (фиг.6) совпадает с осью YY горизонтальной поворотной рукояти 12 для ввода телескопической руки 13 в продольный вьфез барабана 3 (фиг,2). Сразу же после фиксации этого барабана и рукояти с тарелью телескопическая рука вводится в этот вырез посредством составного гидроцилиндра. Рабочая жидкость при этом подается в
поршневые полости гидфоципиндров 28 27 и 26 по( редством гибких шлангов (фиг.11).Маслоподвод к приводному гидроцилиндру 38 закрыт плунжером 33 двухпозициониого золотника 32 (фиг.7 и 8) под действием пружишл 35. В результате клещевой захват 14 занимает верхнее положение (фиг.5) а клещи 23 и 24 при зтом находятся в разведенном положении под действием пружины 40 (фиг.8).
Затем волочильщик включает вращение барабана 3 по часовой стрелке с частотой и с/ упреждающим отключением муфты 69 дополнительного привода 64. При этом виток трубы 15, укладываясь на барабан 3, попадает в клещевой захват 14 (фиг.5), действует на датчик 22 и утапливает подпружиненную пяту 34 золотника 32 вместе с плунжером 33, чем обеспечивается подвод масла в рабочую полость приводного гидроцилиндра 38. При этом корпус цилиндра 38 и поршень 39 со штоком разводятся в разные стороны, сжимая пружину 40 и сводя губки 43 обоих клещей (фиг.5 и 9). Одновременно с зажимом трубы 15 происходит забойка, т.е. некоторый пережим трубы ножами 44 фиксатора трубы (). Эта oneрация захвата и ориентирования трубы совмещается с процессом трубоволочения. При вращении волочильного барабана 3 бухтоприемное устройство 16 вращается вместе с ним за счет взаимодействия захвата 14 со стенками выреза и самой трубой.
Тарель 19 с выходньм валом 66 конического редуктора 65 дополнительного привода 64 вращается относительно корпуса 54 выдвижной пиноли 53 рукояти 12. Механическая передача дополнительного привода 65-71-67-73-72-67 вращается в холостую (фиг.З и 4).
После окончания процесса волочения и остановки волочильного барабана 3 телескопическая рука 13 при включении элёктрогфивода 58 приводит захват 14 с зафиксированной в нем бухтой в нижнее положение (фиг.З). При зтом линия питания приводного гидроцилиндра 38 со сливом не сообщается, а муфта 69 включается и заъшкает кинематическую цепь дополнительного привода 64.
С помощью гидроцилиндра 54 (фиг.4) рукоять 12 поворачивается в горизонтальной плоскости и В11шодит бухтопри емное устройство в положение II
(фиг.2) из зоны волочильного бараба-, на 3 в зону линии 74 для производства подготовительно-вспомогательных операций.
Поскольку конец трубной заготовки ориентирован, то выполнение операций по подготовке трубной заготовки к дальнейшему волочению может быть полностью автоматизировано, т.е. производится без участия оператора-подручного волочильщика.
Для стыковки с рабочей машиной линии 74 в манипуляторе предусмотрены гидроцилиндры 50 (подъем-опускание тарели 19) и 55 (радиальное перемещение тарели), а также дополнительный привод 64 вращения вокруг вертикальной оси тарели 19, сблокированный с системой управления счетчиком оборотов .
После дополнения подготовительновспомргательных операций, заканчивающихся заковкой (заострением) конца трубы с оправкой, бухтоприемное устрЬйство 16 .с трубной заготовкой отводится гидроцилиндрами 51 и 55 от рабочей машины линии 74 и устанавливается над местом разгрузки. Включается механизм поворота тарели 19 с помощью редуктора 56 и электродвигателя 57 и бухта поворачивается в вертикальной плоскости на угол, близкий к 180, для перевода закованного конца в нижнее положение, как зто требуется существукяцей технологией на станах типа ВСТ.
Затем рабочая полость приводного гидроцилиндра 38 сообщается со сливом при одновременном включении электромагнита 36, удерживающего плунжер 33 от преждевременного перемещения влево. Под действием пружины 40 губки 43 клещевого захвата 14 разводятся,опорный гидроцилиндр 13 (фиг.2) с помощью двух гидроцилиндров 30 наклоняется к центру тарели 19 и освобожденная труба падает под собственным весом на наклонную плоскость (не показана) и направляется в нижнюю ветвь системы транспортеров 8 стана 2, подается в бухтонакопитель 9 и верхней ветвью транспортеров 8 (фиг.1) подается в зону размоточного устройства 3, обслзпкиваемую волочильщиком.
Бухтоприемное устройство совмещается с волочильным барабаном (положение I, фиг.2) и начинается процесс волочейия очередной трубной эаготовки, каждая из которых проходит до семи операций по осадке наружного диаметра с 45 до 20 мм. Если бухта проходит последнюю операцию на волочильном барабане, то манипулятор в этой операции не участвует, а бухта после окончания волочения падает вниз и непосредственно
Фигг поступает в систему транспортеров И с вьщачи ее из стана. Закованньй конец при этом можетобрезаться непосредственно на барабане. Таким образом, использование предложенного изобретения сокращает ручной труд и тем самым на 50% сокращается число обслуживанщего персонала.
Фи
1168310
Фи1.6
Б- Б
| Когос A.M | |||
| Механическое оборудование волочильных и лентопрокатных цехов | |||
| М., Металлургия, 1972, с.5051, рис.38 | |||
| Биск М..В | |||
| и др | |||
| Холодная деформацая стальных труб | |||
| Свердловск | |||
| Средне-Уральское изд-во, 1976, Ч.1, с.176 |
