Изобретение относится к промышленным роботам.
Целью изобретения является повышение надежности и упрощение конструкции.
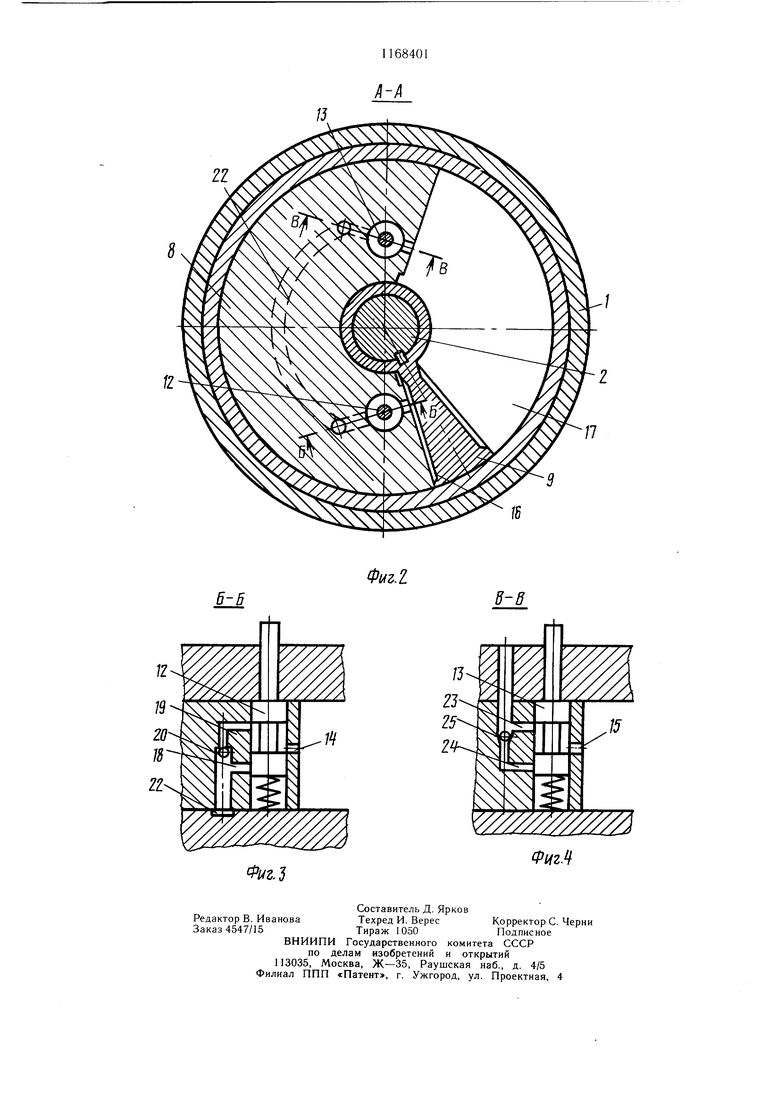
На фиг. 1 изображен модуль движения ротора, общий вид; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 2; на фиг. 4 - разрез В-В на фиг. 2.
Модуль движения робота содержит силовой цилиндр 1, в котором может совершать возвратно-поступательное движение составной поршень, состоящий из неподвижно закрепленного на штоке 2 с помощью гайки 3 порщня 4 и стакана 5. Стакан 5 имеет возможность поворачиваться вокруг оси штока 2. На днище стакана выполнены отверстия 6 для взаимодействия с фиксатором 7. Внутри стакана 5 к его днищу прикреплен разделитель 8 (разделительная перегородка). На щтоке 2 внутри стакана жестко закреплена поворбтная лопасть 9. На верхнем конце щтока 2 закреплен рабочий орган 10 робота, имеющий отверстия 11 под фиксатор 7. В разделителе 8 размещены золотники: для поворота штока 2 с рабочим органом 10 - золотник 12, для поворота разделителя 8 со стаканом 5 - золотник 13. Каналы 14 и 15 служат для подачи рабочего тела (сжатый воздух, жидкость) в рабочие полости 16 и 17 стакана. Канал 18 служит для подвода рабочего тела из нижней полости цилиндра 1 в полость 16 стакана. Канал 19 и обратный клапан 20 служат для отвода рабочего тела из полости 16. Канал 21 в теле поршня 4 и полукольцевая канавка 22 на торце порщня 4 обеспечивают сообщение нижней полости цилиндра 1 с полостью 16 стакана, как при повороте лопасти 9, так и при повороте разделителя 8. Канал 23 служит для подвода рабочего тела из верхней полости цилиндра 1 в полость 17 стакана 5. Канал 24 и обратный клапан 25 служат для отвода рабочего тела из полости 17.
Модуль движения робота работает следующим образом.
Исходным является положение, когда поршень 4 и рабочий орган 10 находятся в нижнем положении. При этом фиксатор 7 находится в отверстии 11 рабочего органа 10 и удерживает последний от проворота. При подаче рабочего тела в нижнюю полость цилиндра 1 происходит перемещение
поршня вверх. При подходе к верхнему крайнему положению фиксатор 7 входит в отверстие 6 и фиксирует стакан 5. Одновременно происходит расфиксация рабочего органа 10. В конце хода штоки золотников
12и 13 упираются в верхнюю крыщку цилиндра 1 и золотники переключаются. При этом рабочее тело из нижней полости цилиндра 1 по каналу 21, канавке 22 и каналам 18 и 14 поступает в полость 16 стакана 5. Между разделителем 8 и лопастью 9 повыщается давление и происходит поворот лопасти 9 вместе с щтоком 2 и рабочим органом 10 вокруг оси. Воздух или жидкость, находящиеся в полости 17, вытесняются
5 через каналы 15 и 24 и обратный клапан 25 в верхнюю полость цилиндра 1 и через распределитель (не показан) на слив. Поворот происходит до упора в стенку разделителя 8 или в выдвижный упор (не показан) если необходимо повернуть на меньщий угол.
0 При подаче рабочего тела в верхнюю полость цилиндра 1 происходит перемещение составного порщня вниз. После того, как произойдет расфиксация стакана 5 и одновременно введение фиксатора 7 в отверстие 11 рабочего органа 10, начнется поворот стакана 5 с разделителем 8 в ту же сторону, в которую перед этим повернулась лопасть 9 с рабочим органом 10. Поворот происходит под давлением рабочего тела, которое поступает через каналы 23
0 и 15 в полость 17 после того, как золотник
13под действием пружины переместится вверх. Так как рабочий орган 10 удерживается от проворота фиксатором 7, то под давлением происходит поворот разделителя 8 со стаканом 5 до упора второй стенки разделителя 8 в лопасть 9. Воздух или жидкость из полости 16 вытесняется при этом через каналы 14 и 19 и обратный клапан 20 в канавку 22 и далее через канал 21 в нижнюю полость цилиндра 1.
Q В конце следующего хода поршня вверх произойдет снова поворот рабочего органа 10 на заданный угол и далее цикл повторяется. Максимальный шаг поворота определяется размерами разделителя 8. При необходимости изменения щага в днище ста5 кана 5 устанавливается упор.
Модуль движения робота обеспечивает поступательное перемещение рабочего органа и его поворот на заданный угол.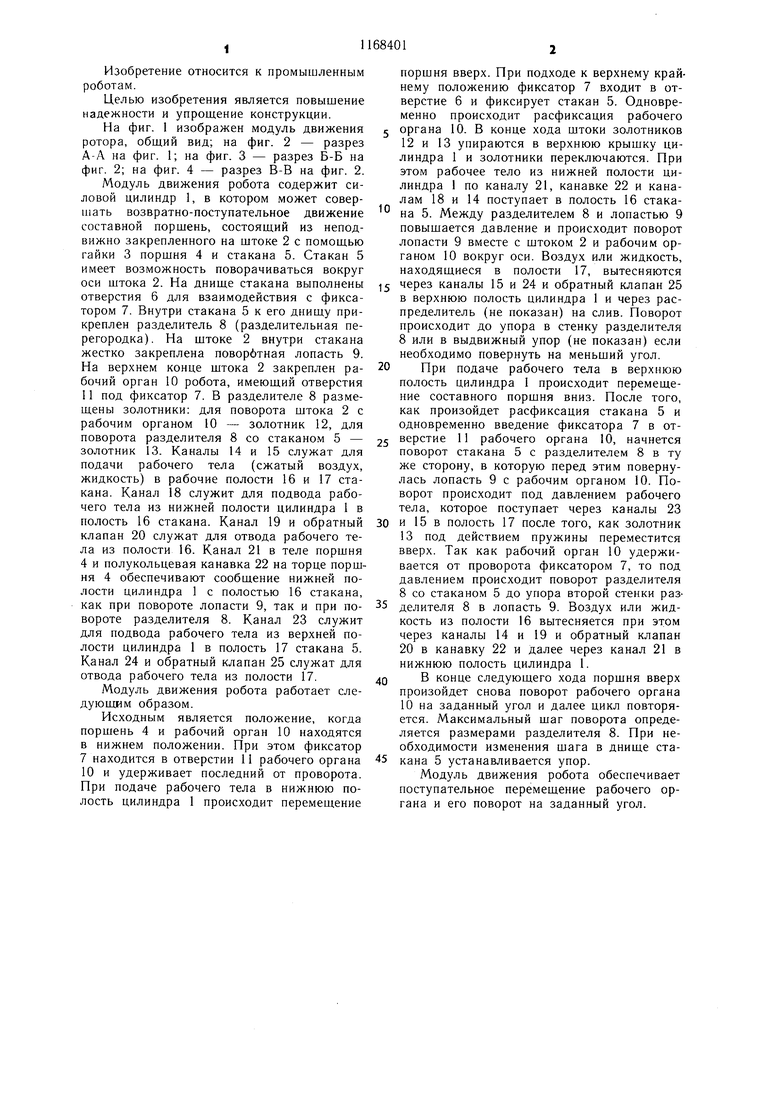
| название | год | авторы | номер документа |
|---|---|---|---|
| Модуль манипулятора | 1987 |
|
SU1512763A1 |
| Модуль промышленного робота | 1985 |
|
SU1299780A1 |
| Модуль движения робота | 1989 |
|
SU1646847A1 |
| ВОЗДУХОРАСПРЕДЕЛИТЕЛЬ ТОРМОЗА ЖЕЛЕЗНОДОРОЖНОГО | 1973 |
|
SU371106A1 |
| Гидравлический перфоратор | 2017 |
|
RU2656062C1 |
| РЕГУЛЯТОР ДАВЛЕНИЯ | 1971 |
|
SU295908A1 |
| ПРОБООТБОРНИК НОЧВЕННЫХ ОБРАЗЦОВ | 1973 |
|
SU407997A1 |
| Гидравлический усилитель | 1958 |
|
SU119490A1 |
| Устройство для управления на расстоянии распределительным органом пневматического двигателя | 1936 |
|
SU54306A1 |
| Воздухораспределитель тормоза железнодорожного транспортного средства | 1981 |
|
SU988617A1 |
1. МОДУЛЬ ДВИЖЕНИЯ РОБОТА, содержащий силовой цилиндр с крышками, на штоке которого закреплен рабочий орган и распределительные золотники управления, отличающийся тем, что, с целью повышения надежности и упрошения конструкции, он снабжен фиксатором, лопастью и разделительной перегородкой, поршень силового цилиндра выполнен составным, одна часть которого жестко закреплена на штоке, а другая выполнена в виде стакана и установлена на штоке с возможностью поворота вокруг его оси, при этом поворотная лопасть и разделительная перегородка установлены внутри стакана, на внешней стороне дниша стакана выполнено отверстие, а на внутренней стороне крышки установлен фиксатор, соосный отверстию в стакане. 2. Модуль по п. 1, отличающийся тем, что, с целью упрошения управления, распределительные золотники смонтированы в разделительной перегородке. (Л О5 СХ) 4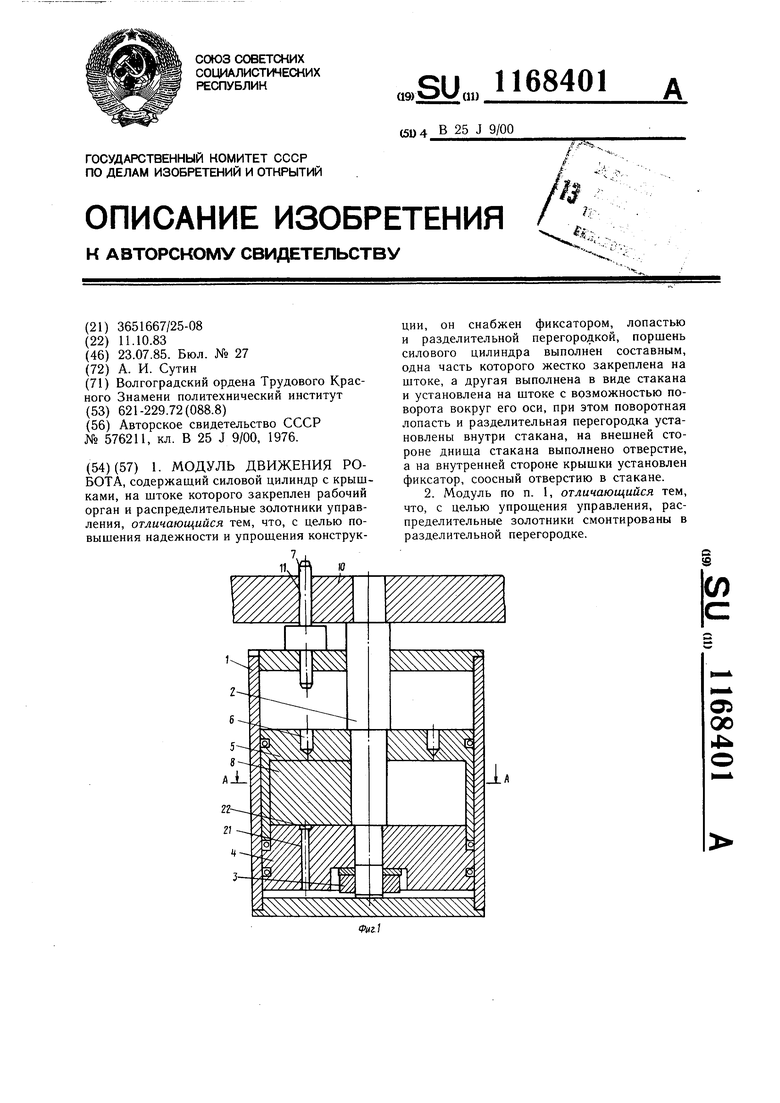
| Модуль движения робота | 1976 |
|
SU576211A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
