Изобретение относится к общему машиностроению, в частности к промышленным роботам.
Целью изобретения является упрощение конструкции путем совмещения функций отдельными элементами модуля.
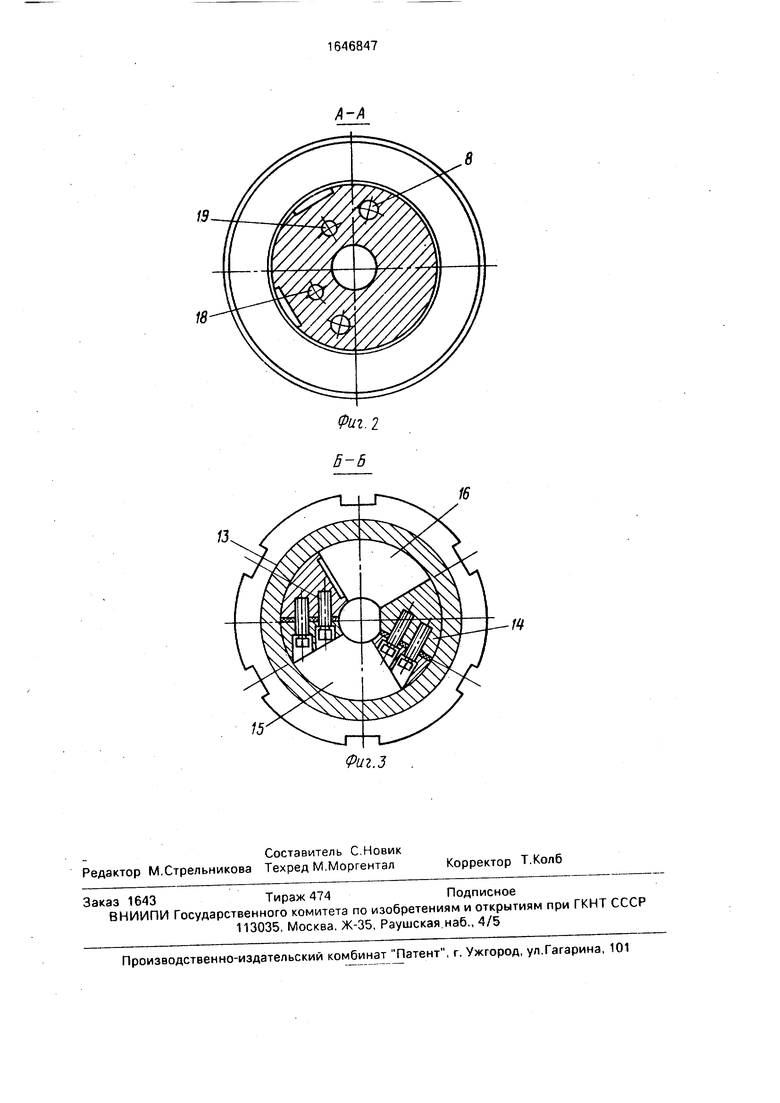
На фиг.1 изображен модуль движения робота; на фиг.2 - разрез А - А на фиг.1; на фиг.З - разрез Б - Б на фиг.1.
Модуль движения робота содержит силовой цилиндр 1, в котором может совершать возвратно-поступательное движение поршень 2, установленный с помощью подшипниковой опоры 3 на штоке 4 с возможностью поворота вокруг его оси. На противоположном конце штока 4 закреплен держатель 5, предназначенный для поворота и удержания рабочего органа-захвата (не показан). Для повышения точности позиционирования на штоке 4 под держателем 5 жестко закреплено основание б т; размещенным в нем фиксатором 7, который предназначен для взаимодействия с отверстиями 8, выполненными в крышке 9 штоковой полости 10 силового цилиндра 1, при крайних положениях его поршня 2, которые занимает при поворотах вокруг его оси шток 4 с закрепленным на нем держателем 5. Бесштоковая полость 11 силового цилиндра закрыта крышкой 12. В штоковой полости 10 на крышке 9 жестко закреплена уплотнительная перегородка 13 с возможностью проскальзывания по ней образующей поверхности штока 4, на котором жестко закреплена поворотная лопасть 14с возможностью ее проскальзывания по внутренней поверхности гильзы силового цилиндра 1 и по плоским поверхностям поршня 2 и крышки 9. Высоты перегородки 13 и лопасти 14 равны и их суммарная высота должна превышать максимальную длину штоковой полости для гарантированного образования моментного цилиндра. Таким образом при крайнем верхнем положении поршня 2, когда он прижат к перегородке 13, образуется моментный цилиндр с полостями 15 и 16. В крышке 12 выполнено отверстие 17 для подачи рабочего тела в бесштоковую полость 11, а в крышке 9 - отверстия 18 и 19, предназначенные для подачи рабочего тела соответственно в полости 15 и 16 образовавшегося моментного цилиндра.
Модуль движения робота работает следующим образом.
Исходным является положение, когда поршень 2 и поворотная лопасть 14 находятся в крайнем нижнем положении. При этом фиксатор 7 располагается в одним из
отверстий 8 крышки 9. При подаче рабочего тела в бесштоковую полость 11 через отверстие 17 крышки 12 поршень 2 перемещается вверх, а вместе с ним движется шток 4 с
основанием 6 и фиксатором 7, происходит расфиксация рабочего органа-захвата. Поршень 2 упирается в перегородку 13 и образуется моментный цилиндр.
При подаче рабочего тела через отверстие 18 в полости 15 моментного цилиндра происходит поворот лопасти 14 со штоком 4 в подшипниковой опоре 3 с закрепленным на нем держателем 5. При работе моментного цилиндра подача рабочего тела в бесштоковую полость 11 продолжается. При прекращении подачи рабочего тела в бесштоковую полость 11 по окончании поворота держателя 5 рабочее тело, заполняя штоковую полость 10, перемещает вниз
поршень 2 и шток 4 с закрепленным на нем держателем 5 с рабочим органом. При этом фиксатор 7 входит в другое отверстие 8 крышки 9. Для подъема штока 4 с держателем 5 и освобожденным от детали рабочим
органом вверх прекращается подача рабочего тела в штоковую полость 10, а подается оно в бесштоковую полость 11.
Поворот держателя в обратную сторону происходит при продолжении подачи рабочего тела в бесштоковую полость 11 и подаче его в полость 16 моментного цилиндра. После поворота штока 4 с держателем 5 в нужную сторону подача рабочего тела в бесштоковую полость 11 прекращается, в результате продолжающейся подачи его в штоковую полость 10 поршень 2 вместе со штоком 4 под давлением рабочего тела, заполняющего штоковую полость 10. опускается и занимает крайнее нижнее
положение, при котором фиксатор 7 входит в одно из отверстий 8 крышки 9. Формула изобретения Модуль движения робота, содержащий рабочий орган, силовой цилиндр, имеющий
гильзу с крышками, поршень и шток, установленный в поршне с возможностью поворота, моментный цилиндр, имеющий уплотнительную перегородку и лопасть, жестко закрепленную на штоке силового цилиндра и примыкающую к плоскости поршня, а также фиксатор, отличающийся тем, что, целью упрощения конструкции путем совмещения функций отдельными элемета- ми модуля, уплотнительная перегородка размещена в штоковой полости силового
цилиндра и жестко закреплена на его крышке с возможностью образования кольцевой полости моментного цилиндра при выдвинутом положении штока силового цилиндра.
15
8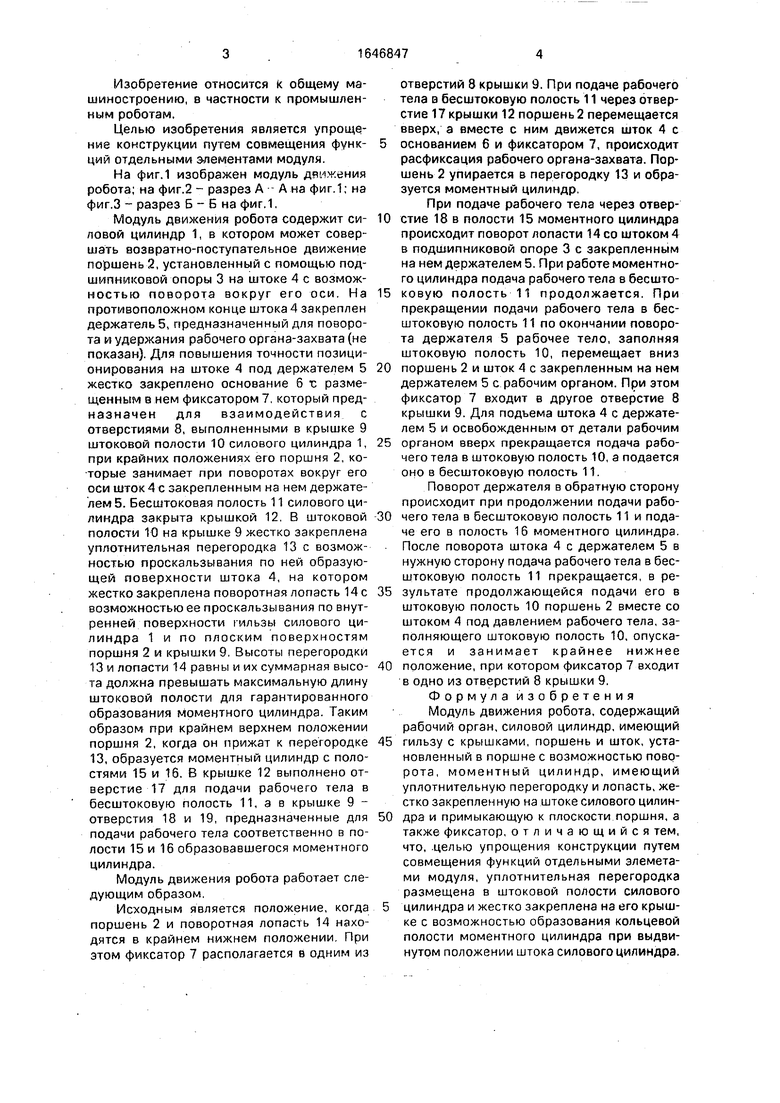
| название | год | авторы | номер документа |
|---|---|---|---|
| Модуль манипулятора | 1987 |
|
SU1512763A1 |
| Модуль движения робота | 1983 |
|
SU1168401A1 |
| УСТРОЙСТВО ДЛЯ ПОДАЧИ ЗАГОТОВОК | 1994 |
|
RU2105653C1 |
| Рука промышленного робота | 1979 |
|
SU837848A1 |
| Устройство для подачи деталей | 1988 |
|
SU1569180A1 |
| Промышленный робот | 1974 |
|
SU503712A1 |
| Захватное устройство | 1987 |
|
SU1414636A1 |
| Модуль шарнира | 1980 |
|
SU980979A1 |
| Муфта сцепления и привод ее управления | 1977 |
|
SU1004681A1 |
| Промышленный робот | 1979 |
|
SU821126A1 |
Изобретение относится к общему машиностроению, в частности к промышленные роботам, Цель изобретения - упрощение конструкции путем совмещения функций отдельными элементами модуля. При подаче рабочего тела в бесштоковую полость 11 силового цилиндра 1 поршень 2 перемешается вверх, а вместе с ним поднимается шток 4 с держателем 5, лопастью 14 и фиксатором 7. В верхнем положении поршня 2 он упирается в уплотнительную перегородку 13, образуя лолоста номентного цилиндра. При подаче рабочего тела в соответствующие полости моментного цилиндра с одновременной подпиткой полости 11 силового цилиндра 1 поворачивается лопасть 14, а вместе с ней шток 4 с держателем 5, несущим захватное устройство. 3 мл.
| Модуль движения робота | 1983 |
|
SU1168401A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Гребенчатая передача | 1916 |
|
SU1983A1 |
