(Л
ОС 05 N( 4
N0
Изобретение относится к машиностроению, а именно к схватам промышленных роботов и манипуляторов, и является усовершенствованием изобретения по авт. св. № 1034896.
Целью изобретения является повышение быстродействия и расширение технологических возможностей за счет обеспечения захвата хрупких деталей.
На чертеже изображен схват, общий вид.
Схват содержит корпус 1, губки 2 и 3. На губке 2 смонтирован эластичный баллон 4, полость которого заполнена сыпучим ферромагнитным веществом 5, кроме того, на губке 2 находятся источник ультразвуковых колебаний 6 и связанный с ним излучатель 7, который размещен в полости баллона 4. На губке 3 установлен опорный элемент 8, выполненный из немагнитного легко деформируемого упругого материала, кроме того, на губке 3 находится электромагнитная обмотка 9.
Схват работает следующим образом.
В исходном положении губки 2 и 3 имеют форму, показанную пунктирной линией. Деталь 10 располагается между губками с
зазором. Для захвата детали на электромагнитную обмотку 9 подается напряжение и включается источник 6 ультразвуковых колебаний. Ультразвуковые колебания при помощи излучателя 7 воздействуют на сыпучее ферромагнитное вещество 5, на которое также воздействует электромагнитное поле. Воздействие электромагнитного и ультразвукового полей на ферромагнитное вещество 5 обеспечивает быстрое и с малым сопротивлением притяжение ферромагнитного вещества 5 к электромагнитной обмотке 9, в результате чего деформируется оболочка баллона 4, которая обтекает деталь 10 и прижимает ее к опорному элементу 8.
Формула изобретения
Схват манипулятора по авт. ев № 1034896 отличающийся тем, что, с целью повышения быстродействия и расщирения технологических возможностей за счет обеспечения захвата хрупких деталей, он снабжен источником ультразвуковых колебаний, имеющим излучатель, при этом излучатель расположен внутри баллона.
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват манипулятора | 1984 |
|
SU1271743A2 |
| Захват манипулятора | 1982 |
|
SU1034896A1 |
| Губка схвата | 1990 |
|
SU1815212A1 |
| Электромагнитный схват | 1983 |
|
SU1168402A1 |
| Губка схвата манипулятора | 1990 |
|
SU1805032A1 |
| Схват для хрупких деталей | 1984 |
|
SU1284827A1 |
| СХВАТ МИКРОМАНИПУЛЯТОРА | 2004 |
|
RU2259915C1 |
| Схват промышленного робота | 1986 |
|
SU1404336A1 |
| АДАПТИВНЫЙ СХВАТ МАНИПУЛЯТОРА | 1991 |
|
RU2021099C1 |
| Схват манипулятора | 1980 |
|
SU965765A1 |
Изобретение относится к машиностроению, а именно к схватам промышленных роботов и манипуляторов. Целью изобретения является повышение быстродействия и расширение технологических возможностей за счет обеспечения захвата хрупких деталей. Для захвата деталей 10 на электромагнитную обмотку 9 подается напряжение и включается источник ультразвуковых колебаний 6, излучатель 7 которого воздействует на сыпучее ферромагнитное вещество 5, заполняющее полость эластичного баллона 4. Воздействие электромагнитного и ультразвукового полей на сыпучее ферромагнитное вещество 5 обеспечивает быстрое его притяжение к электромагнитной обмотке 9, что, в свою очередь, приводит к деформации оболочки баллона 4, которая обтекает деталь 10 и прижимает ее к опорному элементу 8. 1 ил.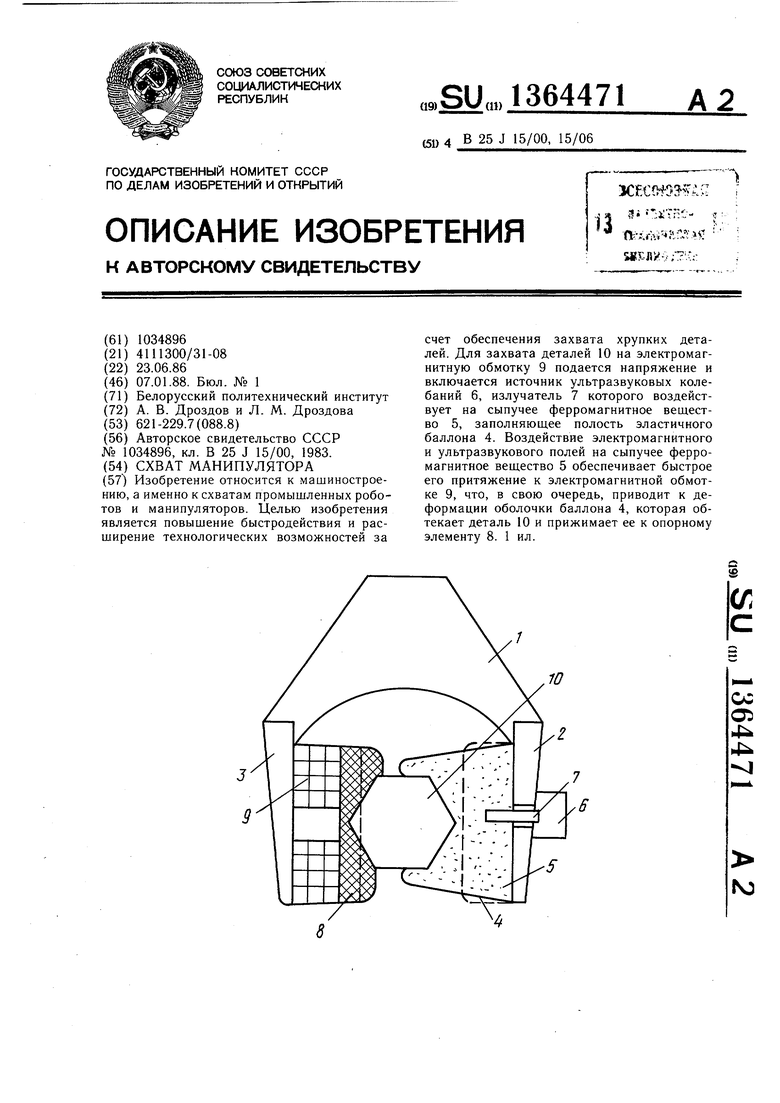
| Захват манипулятора | 1982 |
|
SU1034896A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
