Изобретение относится к машиностроению, а именно к схватам промышленных роботов и манипуляторов, и ЯЕ ляется усовершенствованием изобретения по авт. св. № 1034896.
Целью изобретения является рас1нирсние ()ункциональных возможностей и повышение точности позиционирования схвата за счет его очувствления к форме захватываемого об1.екта, взятого из определенной номенклатуры изделий.
ia чертеже изображен схват манипулятора, вид.
Схват манипулятора содержит корпус 1, в котором установлены губки 2 и 3. На губке 2 смонтирован эластичный баллон 4, полость которого заполнена жидким или сыпучим ферромагнитным веществом 5 (например, порошком феррита. На другой губке 3 смонтироваИ) огюрный элемент 6 и электромагнитная обмотка 7, соединенная с источником постоянного тока (не показан), соединенным с блоком 8 управления манипулятора. Опорпый элемент 6 выполнен из токопроводяшего по.лимера (резина, поролон, пропитанные токопроводяшей смолой или эмалью, и др.) и армирован двумя гибкими электродами 9 и 10 (которые могут быть выполнены, например, из медной сетки). Электроды 9 и 10 соединены проводами 11 и 12 с блоком 13 измерепия электрического сопротивления, выход которого связан с входо.м блока 8 управления манипулятора.
Схват работает следующим образом.
В исходном положепии захватываемая деталь располагается между губками с зазором. Д,1Я за.хвата детали от б.;1ока 8 управления манипулятора поступает сигнал на включение источника постоянного тока, соединенного с обмоткой 7. По обмотке 7 начинает протекать ток, ферромагнитное вещество 5 притягивается к электромагнитной обмотке 7-, деформирует оболочку баллона 4 и, встречая на пути деталь, смещает ее и прижимает к опорпому элементу 6. Последний деформируется и принимает форму детали, при этом деформируется также гибкий электрод 9 и изменяется величина сопротивления между электрода.ми 9 и 10, что фиксируется блоком 13 и передается в блок
8управления манипулятора. По величине сопротивления между электродами 9 и 10 в бло ке управления .манипулятора определяется какая имепно деталь захвачена (из номенкла туры данного участка, цеха). Каждой конкретной детали соответствует вполне определенная величина смещения от первоначального положения при захвате. В соответствии с получепными данными в блоке 8 управления манипулятора определяется величина смещения точки позиционирования, т. е. определяются уточненные координаты конечной точки позиционирования манипулятора и подается соответствующий сигпал на исполнительные органы (привод) манипулятора. Величина сопротивления между электродами
9и 10, а также величина смещения при захвате могут быть определены для каждого вида деталей (из номенклатуры данного цеха, участка и т. д.) до начала работы робота.
Формула изобретения
Схват манипулятора по авт. св. № 1034896, отличающийся тем, что, с це.чью расширения функциональных возможностей и точности позиционирования, он снабжен блоком измерения электрического сопротивления, а опорный элемент выполнен из электропроводного материала и внутри него, параллельно его рабочей новерхности, расположены два гибких электрода, соединенные с блоком измерепия электрического со |ротивления.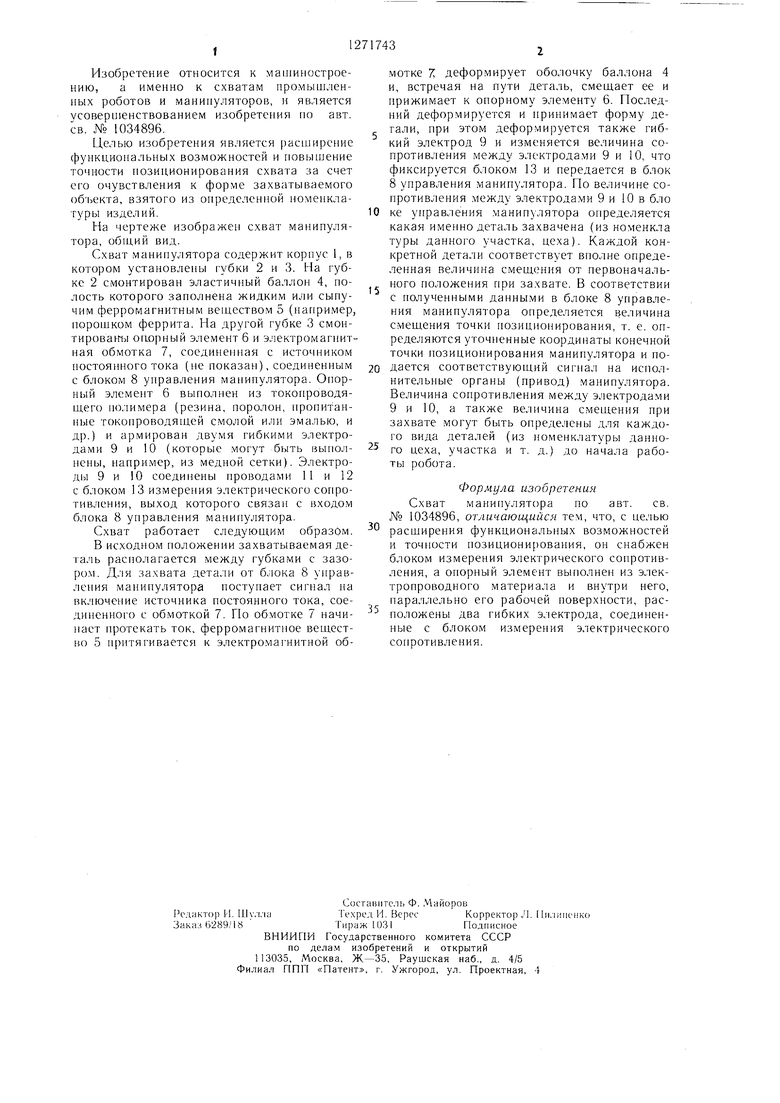
| название | год | авторы | номер документа |
|---|---|---|---|
| Очувствленный схват манипулятора | 1982 |
|
SU1134361A1 |
| Схват промышленного робота | 1984 |
|
SU1219339A1 |
| Схват манипулятора | 1984 |
|
SU1301698A1 |
| Схват манипулятора | 1986 |
|
SU1364471A2 |
| Схват манипулятора | 1983 |
|
SU1096098A1 |
| МИКРОСХВАТ С СИЛОВЫМ ОЧУВСТВЛЕНИЕМ | 2004 |
|
RU2261170C1 |
| Устройство управления схватом манипулятора | 1987 |
|
SU1442395A2 |
| Очувствленный схват робота | 1986 |
|
SU1366392A1 |
| ПРИВОД СХВАТА МАНИПУЛЯТОРА | 2008 |
|
RU2374064C1 |
| Схват робота | 1986 |
|
SU1445949A1 |
Изобретение относится к машиностроению, а именно к схватам промышленных роботов. Целью изобретения является расширение функциональных возможностей и повышение точности позиционирования схвата за счет его очувствления к форме захватываемого объекта, взятого из определенной номенклатуры изделий. В исходном положении захватывае.мый предмет располагается между губками с зазором. Для захвата предмета от блока 8 управления .манипулятора поступает сигнал на включение источника постоянного тока, соединенного с обмоткой 7. По обмотке 7 начинает протекать ток, ферромагнитное вещество 5 притягивается к электромагнитной обмотке 7, деформирует оболочку баллона 4 и, встречая на пути предмет, смеш.ает его и прижимает к опорному элементу 6. Последний деформируется и принимает форму предмета, при этом деформируется также гибкий электрод 9 и изменяется величина сопротивления между электродами 9 и 10, что фиксируется блоком 13 измерения и передается в блок 8 управления манипулятора. По величине из« менения сопротивления между электродами (Л 9 и 10 в блоке 8 управления манипулятора определяется, какая именно деталь захвачена из определенной номенклатуры изделий. 1 ил. ьо 4 оо Го
| Захват манипулятора | 1982 |
|
SU1034896A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
