Контейнер
(Л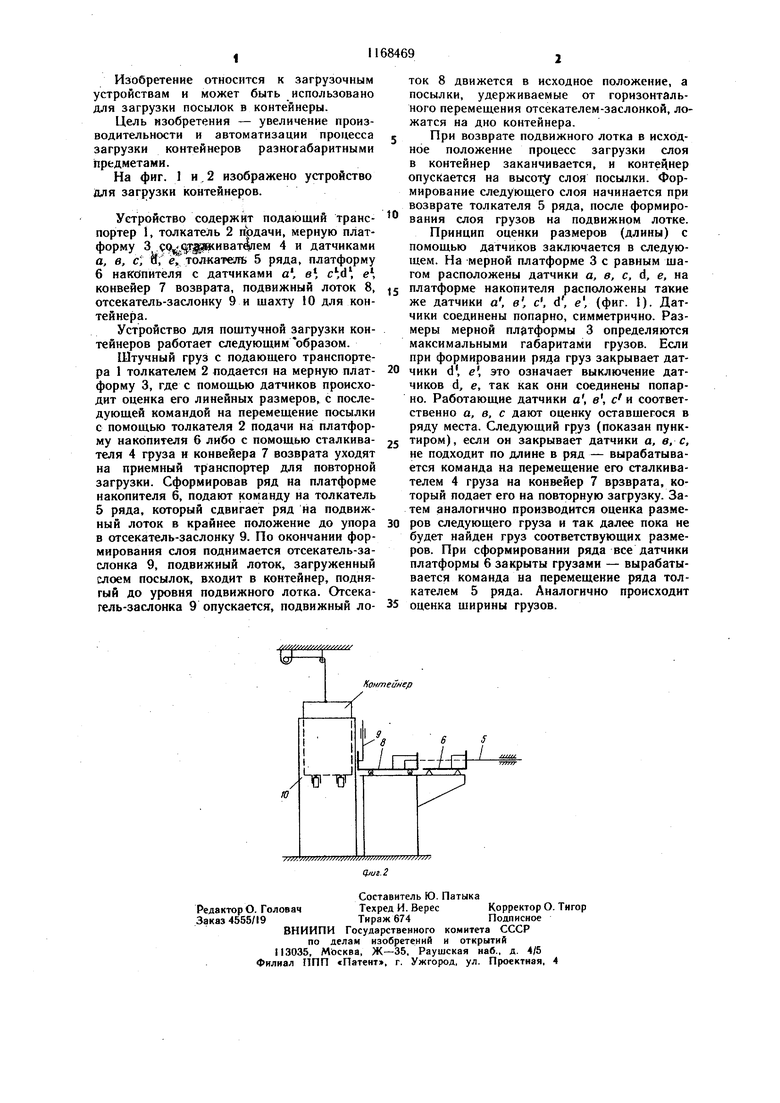
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для подачи и загрузки штучных предметов в контейнеры | 1989 |
|
SU1655843A1 |
| РАЗДЕЛИТЕЛЬ РАЗНОГАБАРИТНЫХ ПРЕДМЕТОВ | 1996 |
|
RU2108873C1 |
| КОМПЛЕКС ПРОМЕЖУТОЧНОГО НАКАПЛИВАНИЯ И ДОЗИРОВАННОЙ ПОДАЧИ НА СОРТИРОВКУ ПОСЫЛОК | 2018 |
|
RU2690969C1 |
| Устройство для загрузки в полочный контейнер изделий | 1987 |
|
SU1433849A1 |
| Установка для укладки строительных из-дЕлий B КОНТЕйНЕРы | 1979 |
|
SU850398A1 |
| УСТРОЙСТВО для ФОРМИРОВАНИЯ ПАКЕТОВ ЗАТАРЕННЫХ | 1966 |
|
SU180133A1 |
| Межоперационный конвейер для транспортирования изделий между позициями обработки | 1990 |
|
SU1819843A1 |
| Устройство для укладки штучных изделий в тару | 1988 |
|
SU1599258A1 |
| СИСТЕМА ЗАГРУЗКИ ШТУЧНЫХ ГРУЗОВ В КОНТЕЙНЕР | 2008 |
|
RU2381166C2 |
| Автоматическая линия для изготовления деталей типа скоб | 1982 |
|
SU1134351A1 |
УСТРОЙСТВО ДЛЯ ПОШТУЧНОЙ ЗАГРУЗКИ КОНТЕЙНЕРОВ, содержащее подающий конвейер с толкателем, накопитель, подвижный лоток и щахту для контейнеров, отличающееся тем, что, с целью увеличения производительности и автоматизации процесса загрузки контейнеров разногабаритными предметами, оно снабжено расположенными между подающим конвейером и накопителем мерной платформой со сталкивателем и отводящим конвейером, при этом накопитель и мерная платформа снабжены датчиками размеров предметов.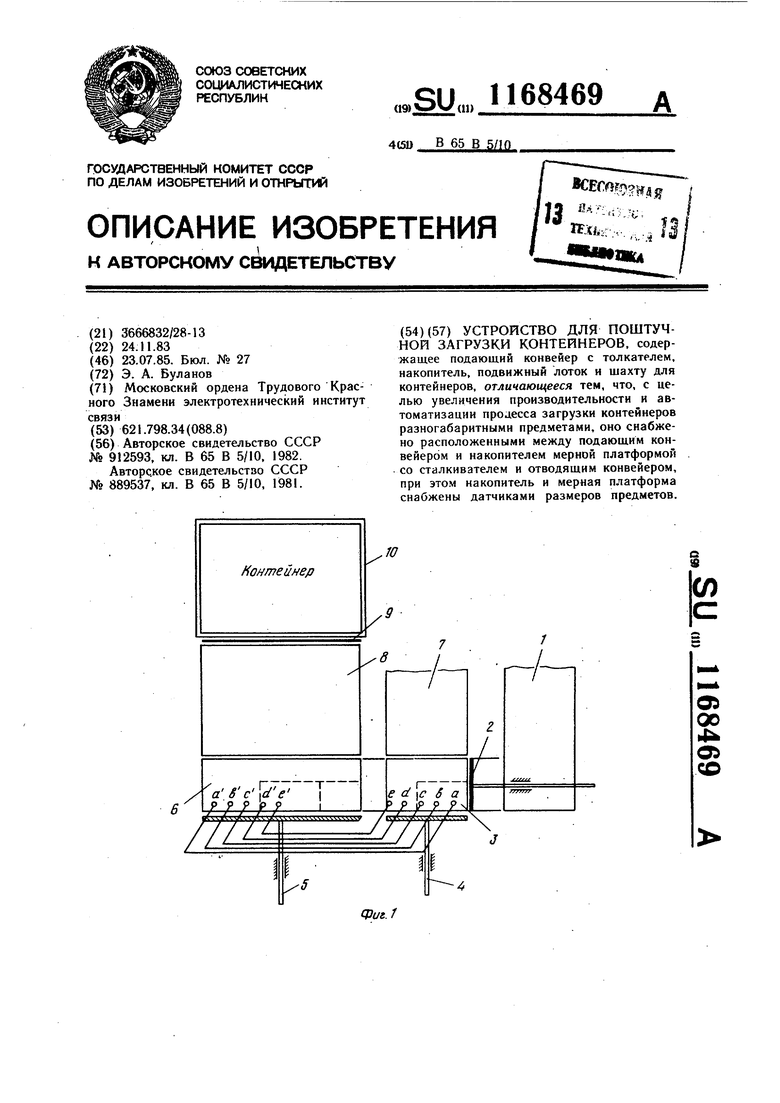
а
X 99999
Т; jf , .у
lXHГЧ S| У
Од
сх
411
/ О) СО
е d с 6 а Я iP Р Ям
Изобретение относится к загрузочным устройствам и может быть использовано для загрузки посылок в контейнеры.
Цель изобретения - увеличение производительности и автоматизации процесса загрузки контейнеров разногабаритными предметами.
На фиг. 1 и. 2 изображено устройство для загрузки контейнеров.
Устройство содержит подающий транспортер 1, толкатель 2 подачи, мерную платформу 3 0 %Т Киват41ем 4 и датчиками а, в, с; И, е, толкатель 5 ряда, платформу б накопителя с датчиками а , в e, конвейер 7 возврата, подвижный лоток 8, отсекатель-заслонку 9 и шахту 10 для контейнера.
Устройство для поштучной загрузки контейнеров работает следующимобразом.
Штучный груз с подающего транспортера 1 толкателем 2 подается на мерную платформу 3, где с помощью датчиков происходит оценка его линейных размеров, с последующей командой на перемещение посылки с помощью толкателя 2 подачи на платформу накопителя 6 либо с помощью сталкивателя 4 груза и конвейера 7 возврата уходят на приемный транспортер для повторной загрузки. Сформировав ряд на платформе накопителя 6, подают команду на толкатель 5 ряда, который сдвигает ряд на подвижный лоток в крайнее положение до упора в отсекатель-заслонку 9. По окончании формирования слоя поднимается отсекатель-заслонка 9, подвижный лоток, загруженный моем посылок, входит в контейнер, поднятый до уровня подвижного лотка. Отсекагель-заслонка 9 опускается, подвижный лоток 8 движется в исходное положение, а посылки, удерживаемые от горизонтального перемещения отсекателем-заслонкой, ложатся на дно контейнера.
При возврате подвижного лотка в исходное положение процесс загрузки слоя в контейнер заканчивается, и контейнер опускается на высоту слоя посылки. Формирование следующего слоя начинается при возврате толкателя 5 ряда, после формирования слоя грузов на подвижном лотке. Принцип оценки размеров (длины) с помощью датчиков заключается в следующем. На мерной платформе 3 с равным шагом расположены датчики а, в, с. А, е, на
5 платформе накопителя расположены такие же датчики а , в , с , d, е (фиг. 1). Датчики соединены попарно, симметрично. Размеры мерной пл0тформы 3 определяются максимальными габаритами грузов. Если при формировании ряда груз закрывает датчики d, е это означает выключение датчиков d, е, так как они соединены попарно. Работающие датчики а , в , с и соответственно о, в, с дают оценку оставшегося в ряду места. Следующий груз (показан пунктиром), если он закрывает датчики а, в, с, не подходит по длине в ряд - вырабатывается команда на перемещение его сталкивателем 4 груза на конвейер 7 врзврата, который подает его на повторную загрузку. Затем аналогично производится оценка размеров следующего груза и так далее пока не будет найден груз соответствующих размеров. При сформировании ряда все датчики платформы 6 закрыты грузами - вырабатывается команда на перемещение ряда толкателем 5 ряда. Аналогично происходит
оценка щирины грузов.
Контейнер
TJ-V
/
Ю
| Устройство для укладки предметов в тару | 1980 |
|
SU912593A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Устройство для загрузки контейнеров предметами | 1980 |
|
SU889537A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
