Изобретение относится к работизации технологических процессов и предназначено для одно- и многослойной укладки изделий различных конфигураций и типоразмеров из магнитных материалов, например, отпрессованных ферритовых сердечников типа в тару (керамическую плиту) для последующего обжига с постановкой последних в накопитель.
Цель изобретение - расширение технологических возможностей путем обеспечения послойной укладки изделий различных типоразмеров.
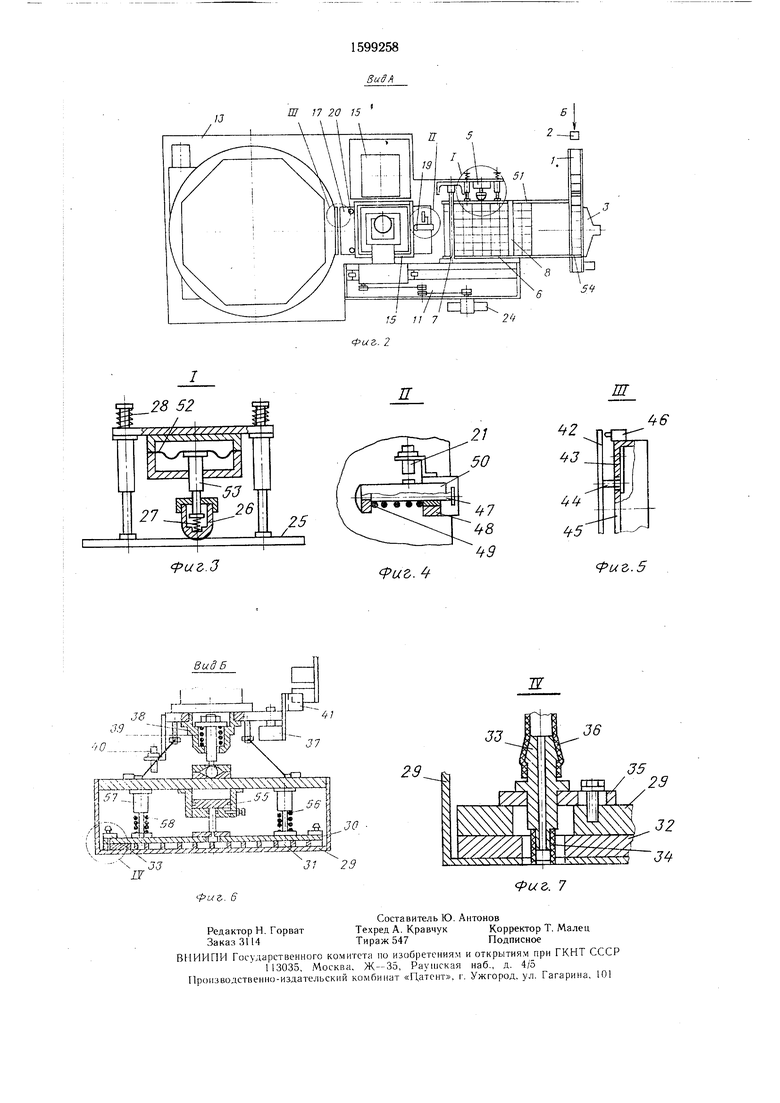
На фиг. 1 изображено устройство для укладки изделий в тару; на фиг. 2 - вид А на фиг. 1; на фиг. 3 - узел I на фиг. 2; на флг. 4 - узел И на фиг. 2; на фиг. 5 - узел III на фиг. 2; на фиг. 6 - вид Б на фиг. 2; на фиг. 7 - узел IV на фиг. 6.
Устройство для укладки штучных изделий в тару содержит транспортер 1 для подачи изделий 2, механизм формирования слоя изделий, включающий горизонтальный сталкиватель 3 ряда изделий, отсекатель 4 последующих изделий, а также регулируемый
уплотнитель 5 для уплотнения слоя изделий, направляющую 6, упорную планку 7, предохранительную планку 8 и щаговый транспортер 9.
На стойке 10 расположен механизм 11 перемещения слоя изделий в горизонтальном и вертикальном направлениях, на котором установлен многопозиционный захват 12.
На основании 13 расположен механизм 14 подачи тары 15 с выдвижной площадкой 16, на которой расположено приспособление 17 для контроля готовности к приему изделий, т.е. подверждения незанятости загружаемой ячейки контейнера-накопителя 18, и механизм 19 позиционирования тары с упорами 20, совмещенными с сигнализатором (датчиком) 21, сигнализирующим о наличии тары 15 на позиции загрузки.
Контейнер-накопитель 18 закреплен на поворотном столе 22, который установлен на стойке 10.
Горизонтальный сталкиватель набранного ряда изделий и шаговый транспортер 9 с храповым механизмом 23 соединен общим приводом 24, выполненным в виде поворотного пневмоцилиндра.
(Л
сд
со ю
ел
00
Регулируемые в горизонтальной плоскости в двух взаимно перпендикулярных направлениях уплотнитель 5, направляющая б и планки 7 и 8 позволяют набрать слой различных изделий необходимых размеров.
Уплотнитель 5 выполнен в виде планки 25 для уплотнения слоя изделий, связанной с корпусом 26, в котором расположена пружина 27 для демпфирования при уплотнении, подобранная по усилию большему,
перемещаются до упора 54 и останавливаются.
После набора ряда изделий необходимой длины отсекатель 4 останавливает последующие, поступающие с пресса изделия.
Набранный ряд перемещается горизонтальным сталкивателем 3, край которого является одновременно и направляющей для изделий, посредством привода 24, выполненного а виде поворотного пневмоцимагнитов 31, например са.марий-кобальто- вых, имеющая возможность перемеи ения в вертикальной плоскости.
20
чем общая масса слоя изделий и усилие Ю линдра, который при возврате сталкивает и возвращающих пружин 28.одновременно перемещает при помощи храМногопозиционный захват 12 состоит изнового механизма 23 транспортер 9 на щаг,
короба 29, выполненного из немагнитного равный ширине набранного ряда изделий материала, в котором расположена плита 30(щаг также регулируемый). И так далее пос закрепленной на ней группой постоянных i, следующие ряды изделий.
Ряды и.зделий проходят под предохранительной планкой 8 между регулируемыми направляющими 6 и 51, доходят до упорной планки 7 и останавливаются. Следующий В плите 30 и планках 32 из немагнитного материала установлены штуцера 33 с вакуумной присоской 34 на регулируемом кронштейне 35. Присоски 34 через щтуцера 33 и трубопровод 36 соединены с датчиком 37 наличия захваченных изделий.
Присоски расположены в захвате таким образом, что при соответствующей регули- ровке-будут находиться над первым и последним рядами набранного слоя изделий.
В корпусе подвески захвата 38 расположена разгрузочная пружина 39, разгружающая массу захвата.
Датчики 37, 40 и 4 позволяют захвату 13 управлять удержавшем и перемещением слоя изделий.
Приспособление 17 подтверждения незанятости пустой ячейки конвейера-накопителя 18 состоит из планки 42, расположен- 35 плиту 30. при зтм осуществляется примаг- ной на плоской пружине 43 через стержень ничивание всего слоя изделий через короб
из немагнитного материала, затем включается аакч Л м в присосках 34, связанных с вакуумным датчиком 37, сигнализирующим о наличии примагниченного слоя.
Получив сигнал, подтверждающий наличие слоя, захват 12 дает команду на подъем слоя изде-лий. При отсутствии слоя изделий захват 12 повторно осуш,5;ствляет захват изделий.
45 Примагниченный с:юй изделий транспортируется вместе с механизмо. у; ; 1 вертикального к горизонтального перемещения в тару 15 (керамическ ую плиту, поданную под загрузку механиз.мом 14 подачи тары).
При соприкосновении захвата 12 с дном 50 тары 15 осуществляется зертикаль- . него перемещения захвата со с/оем изделий по датчику 40, включается пневмо- цилиндр 55 и поднимает плиту 30 с магнитами 31.
Изделия остаются в таре, а захват поднимается и перемещается за новым слоем. Последующий слой укладывается на предыряд встает у предыдущего, и т.д. и при наборе полного слоя изделий происходит их уплотнение за счет проскальзывания его на транспортере 9.
Затем включается пневмоцилиндр 52 и штоком 53 через пружину 27 и корпус 26 лере- pj; мещает планку 25, уплотняя весь слой из- делий, поджимая его к регулируемой направляющей 6, не разрушая при .этом изделие за счет действия пружины 27.
После уплотнения слоя изделий захват 12 опускается до соприкосновения коробом 30 29 со слоем изделий.
При соприкосновении короб 29 приподнимается и срабатывает датчик 40 на останов вертикального перемещения захвата, затем отключается пневмоцилиндр 55 и пружина 56 отпускает по направляющим 57 и 58
44 и закрепленной на кронштейне 45.
Кронщтейн 45 расположен на выдвижной площадке 16 механизма 14 подачи тары, связанной с датчиком 46.
Механизм 19 позиционирования тары состоит из упорного стержня 47, размещенного в кронщтейне 48, и пружины 49, демпфирующей удары о тару при ее позиционировании по упорам 20.
Усилие пружины подобрано по величине больше, чем масса пустой тары. Планка 50, закрепленная на стержне 47, связана с датчиком 21 сигнализации наличия тары под загрузкой.
40
Устройство содержит также направляющую 51, уплотнитель-пневмоцилиндр 52 со штоком 53, а транспортер 1 - упор 54.
Многопозиционный захват 2 включает пневмоцилипдр 55, пружину 56, направляющие 57 и 58.
Устройство работает следующим образом. Ь5
Отпрессованные изделия 2 («Ш -образ- ные сердечники) подаются шибером пресса (не показан). На транспортере 1 изделия
дущий таким же ооразом до полного заполнения тары.
перемещаются до упора 54 и останавливаются.
После набора ряда изделий необходимой длины отсекатель 4 останавливает последующие, поступающие с пресса изделия.
Набранный ряд перемещается горизонтальным сталкивателем 3, край которого является одновременно и направляющей для изделий, посредством привода 24, выполненного а виде поворотного пневмоци линдра, который при возврате сталкивает и одновременно перемещает при помощи хра
нительной планкой 8 между регулируемыми направляющими 6 и 51, доходят до упорной планки 7 и останавливаются. Следующий
плиту 30. при зтм осуществляется примаг- ничивание всего слоя изделий через короб
ряд встает у предыдущего, и т.д. и при наборе полного слоя изделий происходит их уплотнение за счет проскальзывания его на транспортере 9.
Затем включается пневмоцилиндр 52 и штоком 53 через пружину 27 и корпус 26 лере- мещает планку 25, уплотняя весь слой из- делий, поджимая его к регулируемой направляющей 6, не разрушая при .этом изделие за счет действия пружины 27.
После уплотнения слоя изделий захват 12 опускается до соприкосновения коробом 29 со слоем изделий.
При соприкосновении короб 29 приподнимается и срабатывает датчик 40 на останов вертикального перемещения захвата, затем отключается пневмоцилиндр 55 и пружина 56 отпускает по направляющим 57 и 58
дущий таким же ооразом до полного заполнения тары.
При заполнении последующего слоя в таре датчик захвата 37 дает команду на смену тары.
В случае сбоя программы захват сам определяет наличие примагниченных изделий и в случае их наличия укладывает их в тару, а при отсутствии движется за слоем изделий к формирователю слоя, осуществляет его захват, транспортирование и укладку. Если тара уже заполнена, датчик 41 дает команду на смену тары, а захват ждет ее осуществление и затем производит укладку.
Заполненная тара устанавливается механизмом 14 подачи тары в пустую ячейку контейнера-накопителя 18 посредством выдвижной площадки 16, затем площадка опускается на ячейку и подает пустую тару под загрузку, при этом в момент горизонтального перемещения площадки с тарой происходит ее позиционирование.
Таким же образом заполняется послеее, позиционируя к упорам 20, при этом пружина 49 сглаживает толчки и не позволяет упору повредить тару, а планка 50 при перемещении замыкает датчик 21, который сигнализирует о наличии тары под загрузкой и возможности осуществления укладки.
Формула изобретения
1. Устройство для укладки щтучных изделий в тару, содержащее транспортер для подачи изделий, механизм формирования слоя изделий с горизонтальным стал- кивателем ряда изделий, механизм перемещения слоя изделий, включающий много- 5 позиционный захват, механизм подачи тары, механизм позиционирования тары и поворотный стол с контейнером-накопителем, отличающееся тем, что, с целью расширения технологических возможностей путем обеспечения послойной укладки изделий раз10
дующая тара и подается в контейнер-на- 20 личных типоразмеров, механизм формировакопитель 18. При заполнении всего ряда контейнера-накопителя с одной стороны он поворачивается поворотным столом 22 на 90° и устанавливает под загрузку другую свою сторону и так заполняются все четыре стороны контейнера-накопителя.
При выдвижении площадки 16 в контейнер-накопитель 18 в случае случайно установленной тары в ячейку, которая должна быть пустой, срабатывает приспособление
ния слоя изделии включает отсекатель, шаговый транспортер, регулируемый уплотнитель для уплотнения слоя изделий, направляющую, упорную и предохранительную 25 планки, при этом шаговый транспортер и сталкиватель ряда изделий имеют общий привод, механизм подачи тары оснащен приспособлением для контроля готовности к приему изделий загружаемой ячейки контейнера-накопителя, а механизм позиционирова17 подтверждения незанятости ячейки, при зо тары оснащен сигнализатором наличия этом планка 42 перемещается, отогнув плоскую пружину 43, и замыкает датчик 46, выдающий команду на останов выдвижения площадки 16.
тары на позиции загрузки.
2. Устройство по п. 1, отличающееся тем, что многопозиционный захват механизма перемещения слоя изделий включает короб из немагнитного материала и плиту с закрепленной на ней группой постоянных магнитов, разгрузочную пружину и датчик наличия захваченных изделий.
Механизм 19 позиционирования тары при перемещении тары 15 площадкой 16 под загрузку упирается стержнем 47 и поднимает
ее, позиционируя к упорам 20, при этом пружина 49 сглаживает толчки и не позволяет упору повредить тару, а планка 50 при перемещении замыкает датчик 21, который сигнализирует о наличии тары под загрузкой и возможности осуществления укладки.
Формула изобретения
1. Устройство для укладки щтучных изделий в тару, содержащее транспортер для подачи изделий, механизм формирования слоя изделий с горизонтальным стал- кивателем ряда изделий, механизм перемещения слоя изделий, включающий много- позиционный захват, механизм подачи тары, механизм позиционирования тары и поворотный стол с контейнером-накопителем, отличающееся тем, что, с целью расширения технологических возможностей путем обеспечения послойной укладки изделий раз
ния слоя изделии включает отсекатель, шаговый транспортер, регулируемый уплотнитель для уплотнения слоя изделий, направляющую, упорную и предохранительную 5 планки, при этом шаговый транспортер и сталкиватель ряда изделий имеют общий привод, механизм подачи тары оснащен приспособлением для контроля готовности к приему изделий загружаемой ячейки контейнера-накопителя, а механизм позиционирова тары оснащен сигнализатором наличия
тары на позиции загрузки.
2. Устройство по п. 1, отличающееся тем, что многопозиционный захват механизма перемещения слоя изделий включает короб из немагнитного материала и плиту с закрепленной на ней группой постоянных магнитов, разгрузочную пружину и датчик наличия захваченных изделий.


| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для укладки кольцевых изделий в тару | 1986 |
|
SU1406031A1 |
| Устройство для укладки штучных изделий в тару | 1986 |
|
SU1359201A1 |
| УСТРОЙСТВО ДЛЯ ПОСЛОЙНОЙ УКЛАДКИ ИЗДЕЛИЙ В ТАРУ | 2000 |
|
RU2184057C2 |
| Устройство для укладки цилиндрических изделий в тару | 1981 |
|
SU1043070A2 |
| УСТРОЙСТВО ДЛЯ ПОСЛОЙНОЙ УКЛАДКИ ИЗДЕЛИЙ В ТАРУ | 2001 |
|
RU2198831C2 |
| Устройство для укладки штучных изделий в тару | 1982 |
|
SU1027082A1 |
| Устройство для послойной укладки изделий в тару | 1986 |
|
SU1406030A1 |
| МАШИНА ДЛЯ УКЛАДКИ ШТУЧНЫХ ИЗДЕЛИЙ В ТАРУ | 1994 |
|
RU2118274C1 |
| МАШИНА ДЛЯ УКЛАДКИ В ТАРУ ИЗДЕЛИЙ УДЛИНЕННОЙ ФОРМЫ | 2001 |
|
RU2176973C1 |
| МАШИНА ДЛЯ УКЛАДКИ ШТУЧНЫХ ИЗДЕЛИЙ В ТАРУ | 2000 |
|
RU2192996C2 |
Изобретение относится к роботизации технологических процессов. Цель изобретения - расширение технологических возможностей. Устройство содержит транспортер для подачи изделий, механизм формирования слоя изделий, включающий горизонтальный сталкиватель 3 ряда изделий, отсекатель 4, уплотнитель, шаговый транспортер 9, механизм 11 перемещения слоя изделий в горизонтальном и вертикальном направлениях, захват 12, механизм подачи тары, механизм позиционирования тары, контейнер-накопитель 18 и поворотный стол 22. Изделия подаются транспортером к механизму формирования слоя изделий, и горизонтальным сталкивателем 3 из них порядно формируется слой изделий, который захватом переносится в тару. Тара с изделиями подается в пустую ячейку контейнера-накопителя. 1 з.п.ф-лы, 7 ил.
1
/J
риг.З
Вид Б
-.
31 2Э
риг,. 6
. У .
/5 7/ 7
П
Ш
(риг.
иг.5
3
иг. 7
| Устройство для укладки штучных изделий в тару | 1986 |
|
SU1359201A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
