Oi
00 00
со со Изобретение относится к автоматизации управления координатными перемещениями и может быть использовано в системах управления координатографами и, в частности, для управления координатографами гидрографических судовых систем. Цель изобретения - повышение надежности интерполятора. На чертеже изображен предлагаемый линейный интерполятор. Интерполятор содержит первый 1 и второй 2 генераторы импульсов, первый элемент И 3, триггер 4, элемент ИЛИ 5, первый счетчик 6 импульсов, двоичные умножители 1 и 72, регистры 8i и 82 приращений координат, блоки 9: и 92 сравнения, элементы НЕ lOi и 102, элементы ИИ и 1Ь, вторые счетчики 12j и 122 импульсов, сигнальные 13i и 132 и информационные 14| и 142 выходы интерполятора. Интерполятор работает следующим образом. В исходном состоянии в регистр 8i вводится заданное для отработки приращение координаты X, в регистр 82 - приращение координаты Y. Счетчики (фактических перемещений) 12 i и 12 обнуляются. Генератор 2 устанавливает триггер 4 в положение, при котором открыт элемент И 3. При этом на выходе генератора 1 формируются импульсы повышенной частоты, поступают по отношению к частоте импульсов генератора 1 импульсы генератора 2 на счетчик 6. Счетчик вырабатывает распределенные по времени импульсы и подает их на двоичные умножители 7 и Т для выработки импульсов перемещения исполнительных механизМОЕ координат X и Y. Первый импульс на выходе двоичных умножителей через элемент ИЛИ 5 опрокидывает триггер 4, закрывая поступление импульсов повышенной частоты генератора 2 на счетчик 6. Следующий импульс генератора 2 повторяет процесс. Таким образом, частота выходных импульсов на исполнительные механизмы примерно равна частоте генератора 2. Устройства контроля работы по координатам X и Y устроены одинаково, поэтому рассматривается работа устройства по координате X. Каждый выходной импульс добавляет единицу в счетчик (фактических перемещений) 12i. После отработки всего заданного координатного перемещения счетчик 6 вырабатывает импульс переполнения. К этому моменту времени в счетчике (фактических перемещений) 12i при исправной работе находится значение кода, равное заданно.му перемещению. При неисправной работе коды в счетчике 12i и регистре 8i приращения координаты не равны, и блок 9i сравнения через элемент НЕ 10i открывает элемент И 11 . Импульс переполнения счетчика 6 проходит через элемент И 11-f на сигнальный выход интерполятора в виде сигнала неисправности. Аналогично работает устройство контроля по координате Y. При использовании изобретения увеличивается надежность работы интерполятора за счет своевременной остановки его при неисправности и уменьшении времени восстановления при ремонте, так как представляется возможность оперативного определения местонахождения неисправного блока интерполятора и его замены.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля программ на координатографе | 1983 |
|
SU1149219A1 |
| Линейно-круговой интерполятор | 1982 |
|
SU1149218A1 |
| Цифровой линейный интерполятор | 1989 |
|
SU1675849A1 |
| Линейно-круговой интерполятор | 1984 |
|
SU1215090A2 |
| Цифровой линейный интерполятор | 1987 |
|
SU1434406A1 |
| Линейно-круговой интерполятор | 1983 |
|
SU1265700A2 |
| Устройство для задания программы | 1979 |
|
SU849148A1 |
| Линейный интерполятор | 1986 |
|
SU1423984A1 |
| Цифровой линейный интерполятор | 1986 |
|
SU1310779A1 |
| Устройство для двухкоординатного программного управления | 1981 |
|
SU962857A1 |
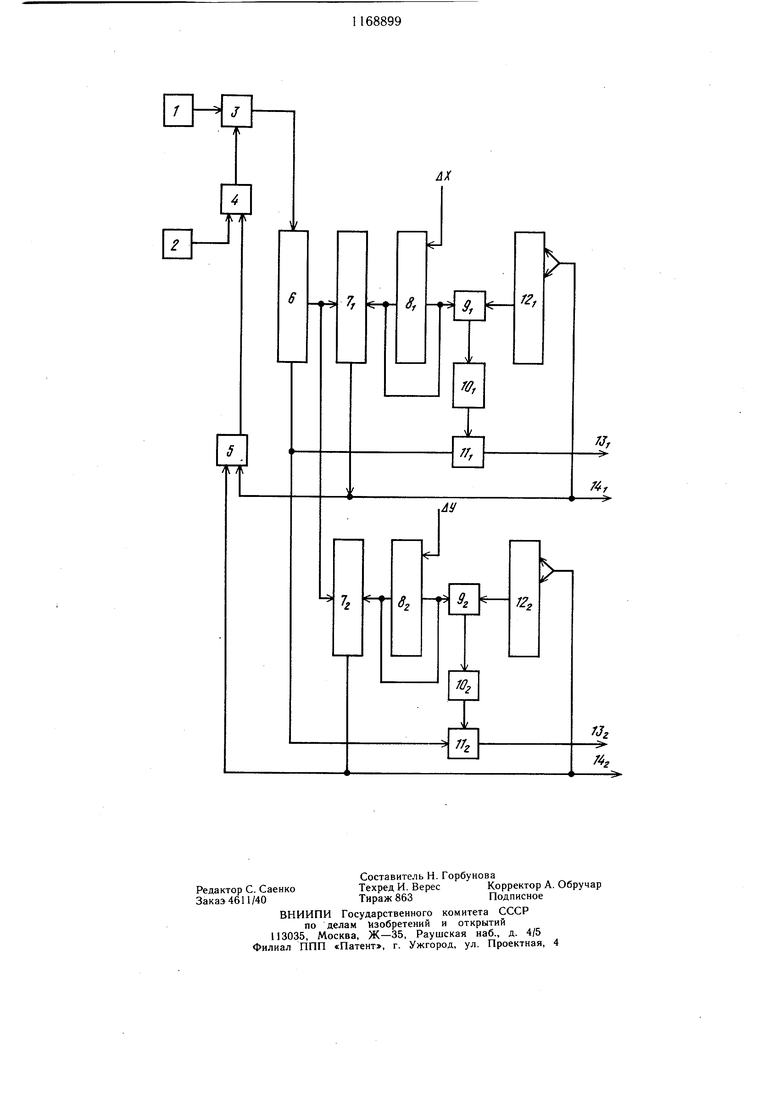
ЛИНЕЙНЫЙ ИНТЕРПОЛЯТОР С САМОКОНТРОЛЕМ, содержащий первый генератор импульсов, подключенный выходом к первому входу первого элемента И, соединенного выходом со счетным входом первого счетчика импульсов, а вторым входом - с прямым выходом триггера, подключенного единичным входом к выходу второго генератора импульсов, а нулевым входом - к выходу элемента ИЛИ, связанного входами с выходами двоичных умножителей каждой координаты, подключенных первыми входами к выходам соответствующих регистров приращений координаты, а вторыми входами - к разрядным выходам первого счетчика импульсов, отличающийся тем, что, с целью повышения надежности интерполятора, в каждый координатный канал введены блок сравнения, элемент НЕ, элемент И и второй счетчик импульсов, подключенный счетным входом к выходу соответствующего двоичного умножителя, а разрядными выходами - к первым входам блока сравнения, соединенного вторыми входами с разрядными выходами соответствующего регистра приращения координаты, выходом через элемент НЕ - с первым входом элемента И, подключенного (Л вторым входом к выходу переполнения первого счетчика импульсов, а выходом - к сигнальному выходу интерполятора.
| Устройство для программного управления положением объекта | 1977 |
|
SU746425A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Числовое программное управление станками | |||
| Под ред | |||
| М | |||
| С | |||
| Агурского и др | |||
| М., «Машиностроение, 1966, с | |||
| Подъемник для выгрузки и нагрузки барж сплавными бревнами, дровами и т.п. | 1919 |
|
SU149A1 |
| Устройство для сортировки каменного угля | 1921 |
|
SU61A1 |
