О5
;о со ю
4
Изобретение относится к горно-рудной промышленности, а именно к подъемно-транспортному оборудованию для транспорта и подъема, например, сыпучего груза соответственно по горизонтальным горным выработкам и стволу шахты на поверхность.
Цель изобретения - упрош.ение конструкции, повышение надежности и производительпости и расширение области применения путем использования системы в наклонных стволах.
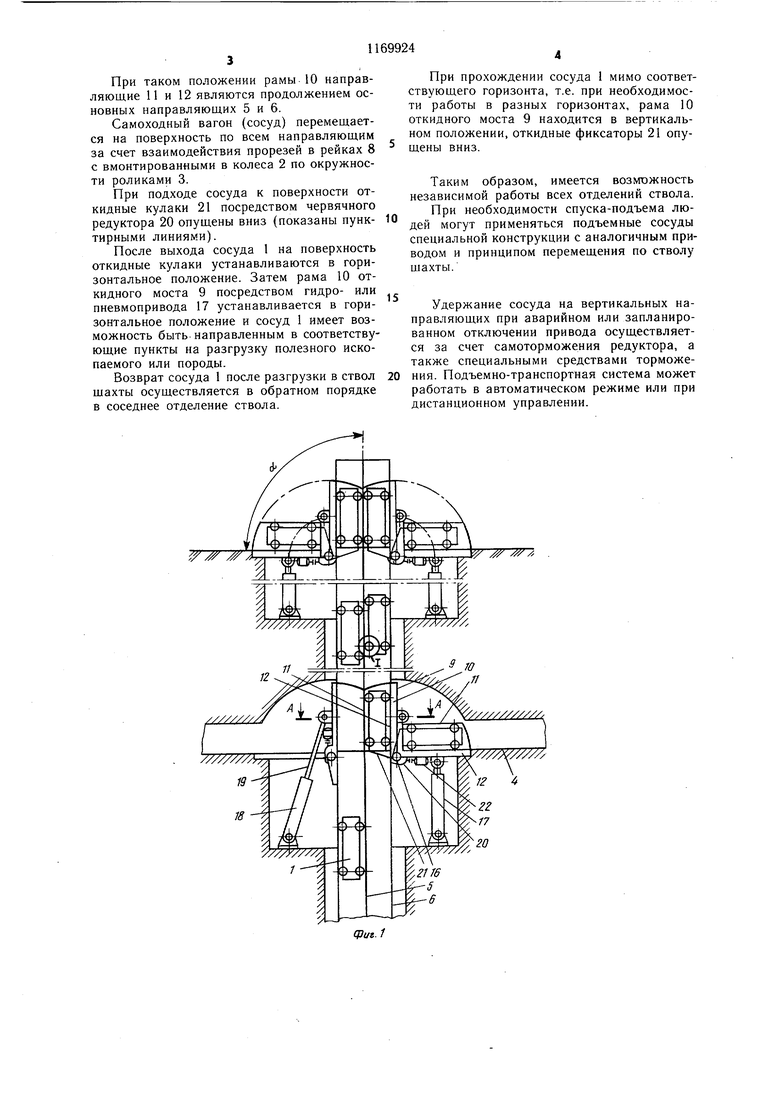
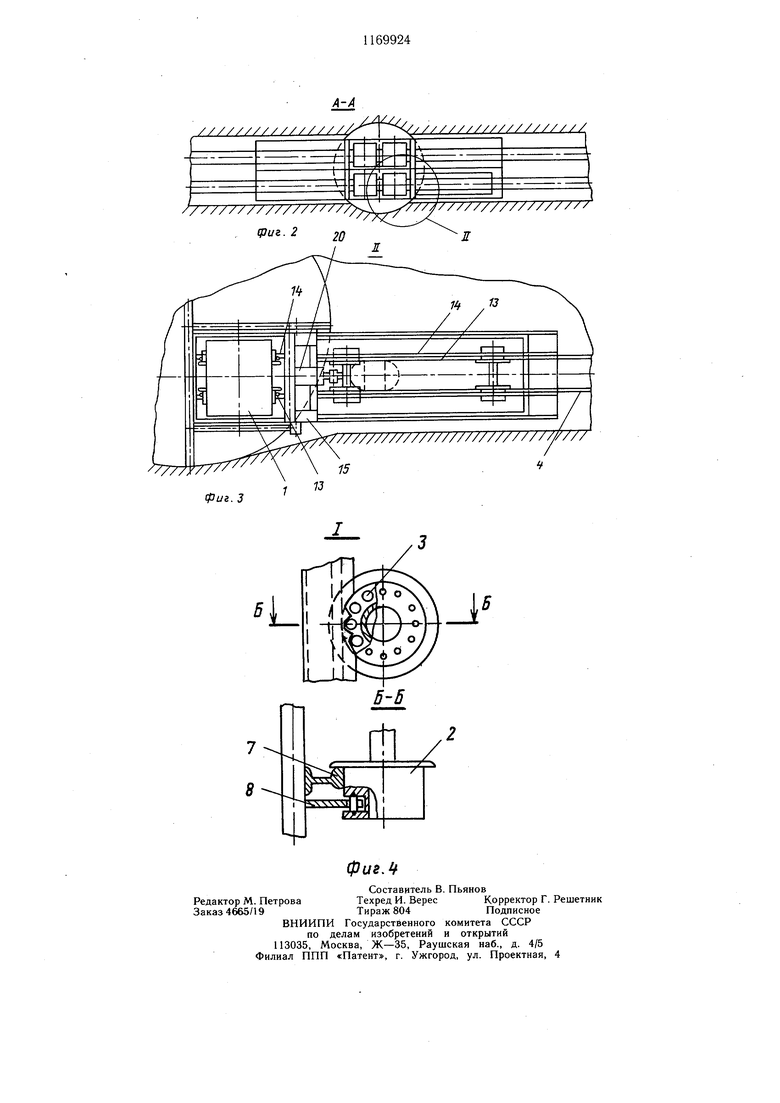
На фиг. 1 изображена предлагаемая система, вид спереди в вертикальной плоскости; на фиг. 2 - то же, вид сверху; на фиг. 3 - одно из отделений ствола и примыкающая к нему горизонтальная выработка (узел И на фиг. 2); на фиг. 4 - узел I на фиг. 1 (взаимодействие колеса самоходного ваго-на - сосуда - с направляюш,ими прн движении по стволу шахты).
Подъемно-транспортная система состоит из плотно закрываюп ихся подъемно-транспортных сосудов 1, каждый из которых оборудован ведущими колесами 2 с роликами 3 и снабжен индивидуальным приводом, содержащим реверсивный электродвигатель и самотормозящийся редуктор, например цилиндрически-червячный, и автономном перемещающихся по стационарно установленным горизонтальным 4 и примыкающим к ним вертикальным (или наклонным под углом ct). 5 и 6 направляющим.
Горизонтальные направляющие 4 для обслуживания каждого отделения ствола (в данном случае 4-го отделения) выполнены в виде рельсовой колеи, а соответственно вертикальные (или наклонные) - в виде двух ветвей 5 и 6, каждая из которых состоит из рельсовой колеи 7 и реек 8 с прорезями.
Горизонтальные 4 и вертикальные (или наклонные) 5 и 6 направляющие совмещены в сечении ствола и примыкающих к нему откаточных выработок.
Горизонтальные направляю цие (рельсы) 4 установлены на каждом горизонте и на поверхности И горизонтальные 4, и вертикальные (или наклонные) 5 и 6 направляющие, находящиеся временно в нерабочем положении (если по ним не перемещаются сосуды 1), в зоне ствола прерываются на длину откидного моста 9. Откидные мосты установлены на каждом горизонте шахты, количество их зависит от количества отделений ствола (в данном случае 4).
Откидной мост 9 установлен с возможностью образовать непрерывные горизонтальные 4 или вертикальные (или наклонные) 5 и 6 направляющие и содержит раму 10, оборудованную направляющими 11 и 12 в виде двух отрезков направляющих 5 и 6, каждый из которых состоит из рельсовой колеи 13 и реек 14 с прорезями и имеет возможность поворачиваться вместе с петлями 15, жестко связанными с валом 16 посредством гидро- или пневмопривода 17, содержащего цилиндр 18 и щток 19. Кроме того, откидной мост 9 содержит самотормозящийся червячный редуктор 20 с червячным колесом, свободно посаженным на вал 16, обеспечивая, таким образом, поворот свободно посаженных на вал 16 и жестко связанных со ступицей червячного колеса откидных фиксаторов 21, предназначенных для дополнительной фиксации подъемно-транспортного сосуда 1 и в период перевода, подъемно-транспортных сосудов 1 из горизонтальных 4 в вертикальные (или наклонные) 5 и 6 направляющие или наоборот. В качестве привода червячного редук2 тора 20 служит электродвигатель 22.
Подъемно-транспортная система работает следующим образом.
После загрузки вагонов-сосудов 1 их плотно закрЕлвают.
Горизонтальное перемещение подъемно0 транспортных сосудов 1 обеспечивают посредством движения их ведущих колес 2 по обычной рельсовой колее 4.
Перед подходом сосуда 1 к стволу шахты ра.ма 10 откидного моста 9 вместе с петлями 15, жестко связанными с валом 16 посредством гидро- или пневмопривода 17, содержащего цилиндр 18 и шток 19, устанавливается в горизонтальное положение. При этом направляющие 12 служат продолжением горизонтальных направляющих
0 (обычной рельсовой колеи) 4.
Посредством электродвигателя 22 приводится в действие самотормозящийся червячный редуктор 20, обеспечивая поворот откидных фиксаторов 21 в вертикальное положение.
Таким образом, подъемно-транспортная система готова к приему очередного сосуда 1.
Самоходный вагон (сосуд) 1, который
Q ранее перемещался по направляющим горизонтали- (направляющим 4) на колесах 2, входит на раму 10 откидного моста 9, перемещаясь при этом на колесах 2 по направляющим 12, состоящим из рельсовой колеи 13 и реек 14 с прорезями, взаимодействующими с вмонтированными в колеса 2 по окружности роликами 3. После того, как сосуд 1 подощел вплотную к откидным фиксаторам 21, предназначенным для дополнительного стопорения его в период перевода из горизонтальных направляющих 4 в вер тикальные (или наклонные) 5 и 6 или наоборот, рама 10 откидного моста 9 вместе с петлями 15, жестко связанными с валом 16 посредством гидро- или пневмоцилиндра 17, устанавливается в вертикальное или наклонное (при наклонном стволе шахты) положение. В этом случае откидные фиксаторы 21 совместно с рамой 10 поворачиваются на соответствующий угол.
При таком положении рамы 10 направляющие 11 и 12 являются продолжением основных направляющих 5 и 6.
Самоходный вагон (сосуд) перемещается на поверхность по всем направляющим за счет взаимодействия прорезей в рейках 8 с вмонтированными в колеса 2 по окружности роликами 3.
При подходе сосуда к поверхности откидные кулаки 21 посредством червячного редуктора 20 опущены вниз (показаны пунктирными линиями).
После выхода сосуда 1 на поверхность откидные кулаки устанавливаются в горизонтальное положение. Затем рама 10 откидного моста 9 посредством гидро- или пневмопривода 17 устанавливается в горизонтальное положение и сосуд 1 имеет возможность быть направленным в соответствующие пункты на разгрузку полезного ископаемого или породы.
Возврат сосуда 1 после разгрузки в ствол щахты осуществляется в обратном порядке в соседнее отделение ствола.
При прохождении сосуда 1 мимо соответствующего горизонта, т.е. при необходимости работы в разных горизонтах, рама 10 откидного моста 9 находится в вертикальном положении, откидные фиксаторы 21 опущены вниз.
Таким образом, имеется возможность независимой работы всех отделений ствола.
При необходимости спуска-подъема людей могут применяться подъемные сосуды специальной конструкции с аналогичным приводом и принципом перемещения по стволу шахты.
Удержание сосуда н.а вертикальных направляющих при аварийном или запланированном отключении привода осуществляется за счет самоторможения редуктора, а также специальными средствами торможения. Подъемно-транспортная система может работать в автоматическом режиме или при дистанционном управлении.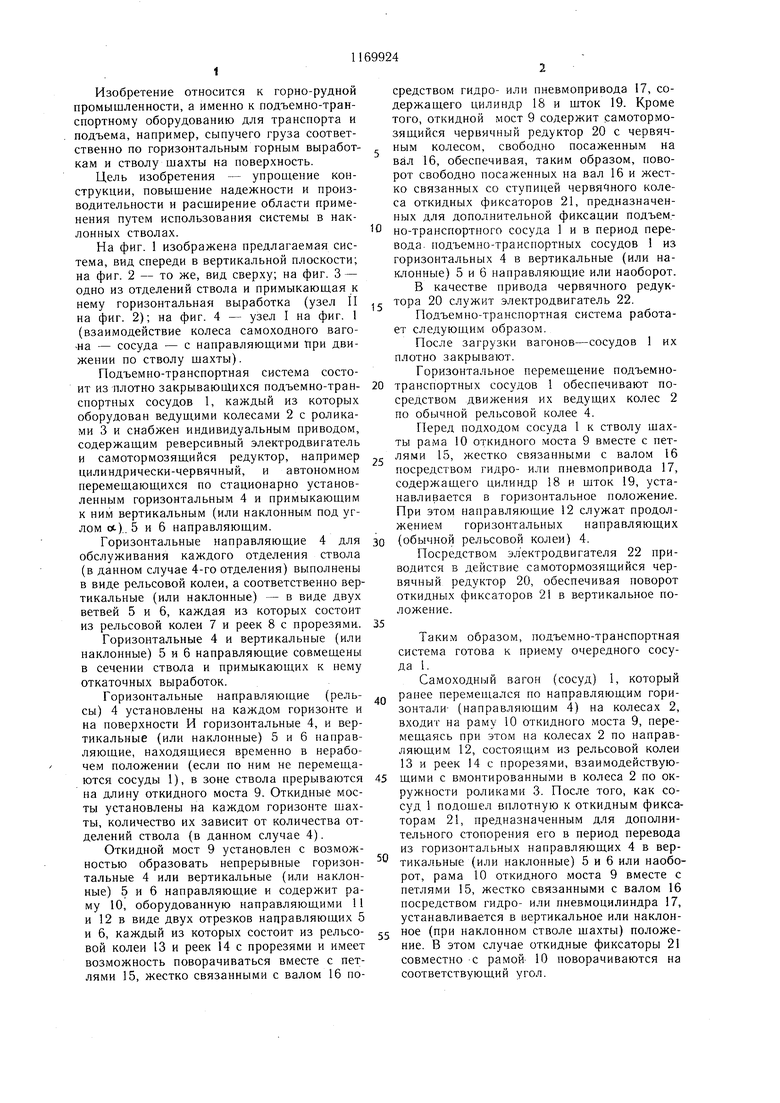
| название | год | авторы | номер документа |
|---|---|---|---|
| Подъемно-транспортный комплекс | 1984 |
|
SU1237597A1 |
| Транспортное устройство клетевого шахтного ствола | 1975 |
|
SU523024A1 |
| Подъемно-транспортная система | 1978 |
|
SU775034A1 |
| Подъемно-транспортный комплекс | 1985 |
|
SU1258803A1 |
| КОНВЕЙЕРНАЯ ОТКАТКА | 2016 |
|
RU2627918C2 |
| Подъемно-транспортная установка | 1976 |
|
SU612885A1 |
| СПОСОБ ВСКРЫТИЯ И ПОДГОТОВКИ РУДНЫХ ЗОН И ПОДЪЕМНО-ТРАНСПОРТНАЯ УСТАНОВКА ДЛЯ СПОСОБА | 2005 |
|
RU2346157C2 |
| Подъемно-транспортная система | 1987 |
|
SU1446079A1 |
| СПОСОБ ЗАГРУЗКИ И ВЫГРУЗКИ АВТОМОБИЛЯ В МНОГОЯРУСНОЙ МЕХАНИЗИРОВАННОЙ АВТОСТОЯНКЕ С ОППОЗИТНЫМ РАСПОЛОЖЕНИЕМ ЯЧЕЕК ХРАНЕНИЯ ОТНОСИТЕЛЬНО ШАХТЫ ПОДЪЕМНИКА И АВТОСТОЯНКА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1997 |
|
RU2120528C1 |
| Наклонный подъемник | 1977 |
|
SU626000A1 |
1. ПОДЪЕМНО-ТРАНСПОРТНАЯ СИСТЕМА, включающая грузонесущую платформу с автономным приводом, горизонтальные и примыкающие к ним вертикальные направляющие и элемент для перевода грузонесущей платформы из горизонтальных направляющих в вертикальные или.наоборот, отличающаяся тем, что, с целью упрощения конструкции, повышения надежности и производительности и расширения области применения путем использования системы в наклонных стволах, вертикальные или наклонные направляющие выполнены в виде двух рельсовых ветвей, причем каждая рельсовая колея содержит рейки с прорезями для движения по ним роликов, вмонтированных в колеса грузонесущей платформы, а элемент для перевода грузонесущей платформы из горизонтальных направляющих в вертикальные или наклонные или наоборот выполнен в виде откидного моста с приводом и рамой, которая оборудована отрезками рельсовых ветвей с рейками и установлена с возможностью образования непрерывных горизонтальных или вертикальных, или наклонных направляющих, а также откидные фиксаторы с приводом. 2. Система по п. 1, отличающаяся тем, i что привод откидного моста выполнен в виде силового цилиндра, шток которого шарнир(Л но связан с рамой, а корпус щарнирно установлен на железобетонном основании в околоствольной выработке, а привод фиксатора выполнен в виде электродвигателя и самотормозящегося червячного редуктора.
| Подъемно-транспортная установка | 1976 |
|
SU612885A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
| Подъемно-транспортная система | 1978 |
|
SU775034A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
