1129
Изобретение относится к автоматическому измерению параметров работы экскаватора-драглайна при выполнении пскрышных бестранспортных работ.
Цель изобретения - повышение точ- нести за счет определения подготовленности горной массы к экскавации.
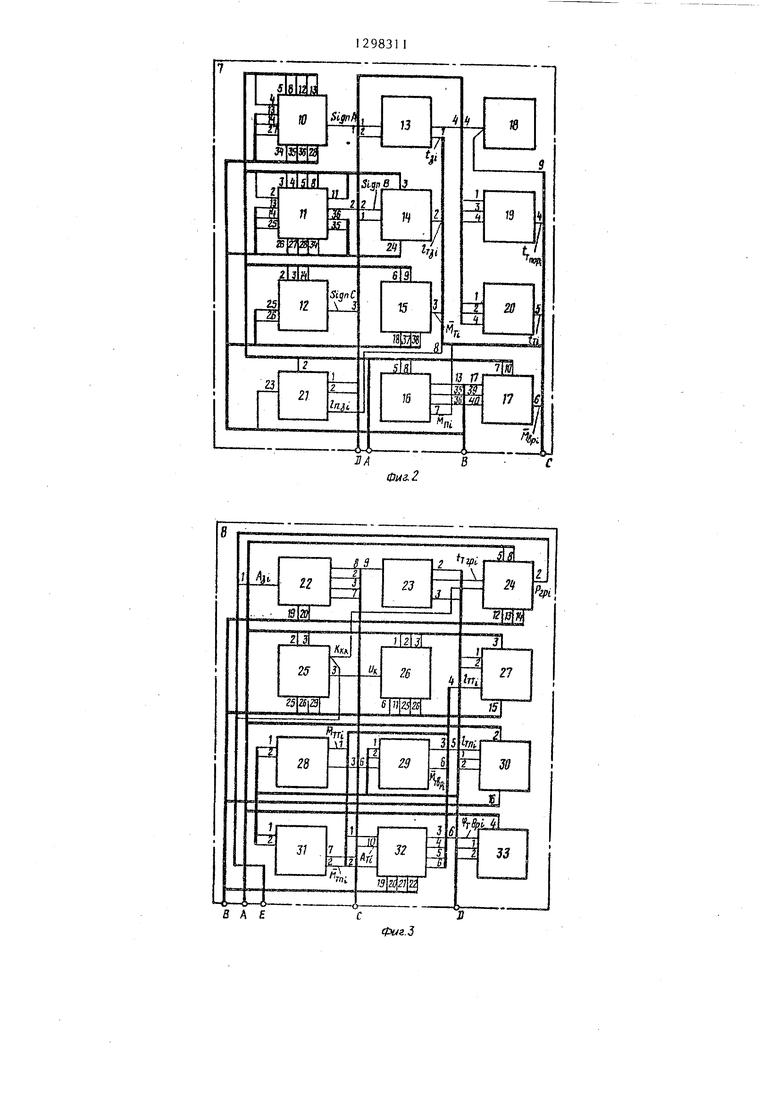
На фиг, 1 приведена блочная схема устройстваi реализующего способ; на фиг. 2-4 - блочные схемы узлов вычи- слителя.
Способ включает следующие основные операции: измерение угла поворота валов двигателей механизмов подъема tf,, тяги , поворота платформы QJв.;; измерение токов якорных цепей двигателей механизмов подъема ,, , тяги
Л
поворота платформы -Ig
измерение
-
токов цепей возбуждения двигателей механизмов подъема i,; , тяги i-r; , по ворота платформы igp, ; измерение в плоскости стрелы угла наклона плоскости поворотной платформы к горизонту „.; определение режима работы основных узлов и механизмов зкскаватора: Sign а 1 - при сматывании тягового каната с барабана лебедки; Sign b при наматывании тягового каната на барабан лебедки; Sign с 1 - при увеличении якорного тока двигателя привода механизма тяги, т.е. при Л1, / /ut О, Sign d 1 - при уменьшении якорного токи двигателя привода меха IT;низма тяги, т.е. при гг - 0; опре-
деление в i-м цикле экскавации начала заполнения ковша Sign А 1 - при одновременном выполнении условий
т ф
-ri- n;
D
0,5 Р,
Бп
Sign b 1 Sign b 1
где C - машинная постоянная двигателя механизма подъема .ковша;
(2)
t,
q - число интервалов интегрирова- гс ния;
интервал интегрирования; oi; - фактический угол заполнения ковша:
5
12
ci; Ч ер; к,-; (3) К /- передаточное число редуктора механизма поворота платформы ;
oiHj3, углы начала и окончания сектора заполн ения ковща;
t, (1 -е, (4)
где Фр, - магнитный поток насыщения
двигателя механизма подъема; 1„„ - постоянная характеристики
DM,
намагничивания двигател я механизма подъема;
t2
j Ч„. dtl
t,
Чп;
1 bh; q tj - t,
(5)
PJJ - масса порожнего ковша, определение в i-м цикле экскавации начала отрыва груженного ковша от за боя Sign В 1 - при одновременном выполнении условий
2 сДп; -РП;
DS.
Oi,(X. od.
Sign а
2,6Р„
:0,6 ni
(6)
Д - L i ;
(7)
VV
- (:. - ; )
2L
(8)
40 Jp; КгЧ ,. + и,п + 0,121 1
-ЦП
(9)
45
50
Г. . + J + 0,49J,, (10)
K, Kj - передаточные числа редукторов механизмов подъема и тяги;
5;лины подъемных и тяговых цепей;
L const - расстояние между точками схода с направляющих шкивов тягового и подъемного KaHaTOBj
измерение длительности операции заполнения ковша
-тек
- 4sign В 1
t.en - текущее время;
тек
sign А 1 (11)
31298311
измерение расстояния перемещения ков- ша при его заполнении
К,С,.
Sign В 1
Sign А 1, (12)
М
тп;
Тii .
-te
to
определение момента на валу двигателя механизма тяги в процессе заполне ния ковша
М,. С,1,.Ф,. , (13) где CT - машинная постоянная двигателя механизма тяги ковша; 1, ,9. - определяются по формулам
аналогичным (2), (4); 15 где 1д при Sign А, 1 измерение прир ащения свисающей части подъемного каната при заполнении ковша
М
- ,1 «.Pi-it
TBpi
- t.
tg при Sign В 1
Sign В 1
Sign А 1 (U)
измерение момента на валу двигателя механизма подъема в процессе заполне
ния ковша машинная постоянная двигателя
М. . , (15) механизма поворота платформы;
определение работы, затраченной определяется по формулам,
загрузку ковша,30 аналогичным (2), (4);
А,,М,. 1,,, .f., (16)
Kg - коэффициент пропорциональности;
где К , Kj - коэффициенты пропорциональности;
определение длительности операций транспортировки груженного ковша от
определение в i-м цикле экскавации момента отрыва его от забоя, включая начала разгрузки ковша Sign С 1 при длительность операций разгрузки ковша, одновременном выполнении условия « транспортировки порожнего до начала
операции его заполнения в последующем
цикле экскавации
0,6
i
Ln;
Sign d 1 ,
1
40
Ч; t,e
-tre
Sign , (26)
(17)
Sign определение массы груженного ковша на интервале
45
определение работы в i-м цикле экскавации, затраченной на транспортирование груженного ковша, от начала отрыва его от забоя на выполнение опера- ции разгрузки ковша и на транспортирование порожнего ковша до начала операции заполнения ковша в последующем цикле экскавации
АТ, К,М,,1,,.+ КД Лп;+ K,K,M,,.tf,,p, ,
М, -Аь
Г - MT:
dt
- t,
(19)
Тii .
-te
(20)
М
- ,1 «.Pi-it
TBpi
- t.
(21)
1д при Sign А, 1
tg при Sign В 1
аналогичным (2), (4);
Kg - коэффициент пропорциональности;
определение длительности операций транспортировки груженного ковша от
40
Ч; t,e
-tre
Sign , (26)
(17)
Sign определение массы груженного ковша на интервале
45
5
г const - радиус вращения точки схода подъемного каната с направляющих шкивов;
r-f const - радиус вращения точки схода тягового каната с направляющих шкивов;
режимный коэффициент (С
1,0- при двигательном режиме работы; с 1,2 - при тормозном режиме);
углы наклона стрелы и поворотной платформы к горизонту;
определение массы порожнего ковша Р, на интервале
теп
-t
Sign А,. 1
тек
Sign (31)
С. 2 arctg
2.
пределение вида черпания с формироанием сигнала верхнего черпания 20 ign ВЧ I при одновременном выполении условий на интервале 15;
h- L sin(e . )
1,. - (I,Or 1,5) 1,„
In; (0.1-0.3)1, (35)
Ч; (0,,3)I,p сигнал нижнего черпания (нормального) Sign НЧН 1 при одновременном вьтол- нении условий на интервале tj;.
25
30
(37)
25 + Lsin(,)5 (.) I,, (1,0т1,5)1.„,,
In; - (,3)in,
IBP; (0,1гО,3)1,р,„
сигнал нижнего черпания (глубокого) Sign НЧГ I при одновременном выполнении условий на интервале t. h; 25 + Lsin (6 )
I,;Ml,Ovl,5)l,,
1п.(0,1тО,3)1„,„„
1вр;(0,1тО,3)18р„„
где L - расстояние между точками схода тягового и подъемного канатов с направляющих шкивов;
углы наклона стрелы и повсг- ротной платформы в плоскости стрелы к горизонту; h - расстояние по вертикали между точкой схода подъемного каната с головного шкива и, центром тяжести ковша;
1. ,I.,Ig. - средние значения токов
якорных цепей двигателей механизмов тяги, подъема, поворота платформы;
35
40
по формулам, аналогичным (28) - (30); определение количества перемещенной горной массы в v -м цикле экскавации
Р Р - Р м; гр; пор;
(Ъ2
определение расстояния по вертикали между точкой схода подъемного каната с головного шкива и центром тяжести ковша
hi Г„;.со8(90 -Е, -8,; С);(33)
(34)
0
5
If , 1„ , 1,„ - номинальные значения
ном ном Рном
токов якорных цепей двигателей механизмов тяги, подъема, поворота платформы; определение вида основной работы: первый вид работы Sign ОР 1, если выполняются условия Sign OP 1
0
5
0
Sign Or 1 , (38)
Sign Ч I .
К-й вид работы Sign ОР 1, если выполняются условия
Sign OF 1 1
Sign О 1 (39)
Sign Чк IJ
где Sign OP 1 - если обеспечивается последовательное выполнение операций начала заполнения ковша и отрыва груженного ковша от забоя;
Sign ,... ,Sign 0 1 - условия нахождения ковша при разгрузке в зонах, характеризуюп(их 1-й,... ,К-й виды ра,боты;
Sign Ч, 1 ,. . .,Sign Ч, I - уело- ВИЯ нахождения ковша при его заполнении в зонах, характеризующих 1-й,..., К-й виды работы;
контролирование вьшолнения цикла экскавации, как последовательное выполнение операции цикла экскавации:
{ Sign A l - sign С (Sign А, l ,(40)
и подсчет числа выполненных циклов экскавации п,
определение подготовленности горной массы к экскавации по К-тому виду основной работы К„ РГ,. t,.
к 21 (А,. + А,. )(t,.- где п - число выполненных циклов экскавации;
45
50
поправочный коэффициент,учитывающий вид черпания, определяется значением Sign ВЧ, Sign НЧН, Sign НЧГ (см. таблицу) ;,5 Р,..,- количество перемещенной гор i
ной массы в 1-м цикле экскавации;
А. ,А,-- затраченная работа на загрузку ковша и транспортирование Ш груженного ковша, его разгрузку и транспортирование порожнего ковша в i-M цикле экскавации;
t,.,t, - длительность операции запол- 5 нения ковша и длительность транспортирования груженного ковша, операции его разгрузки и транспортирования порожнего
датчик 4 угла поворота вала двигателя механизма поворота платформы, выходной блок 5, вычислитель 6, содержащий связанные между собой узлы 7-9. Датчики 1-4 и выходной блок 5 подключены к вычислителю 6, к другим входам которого (по/ цепи А) подключены якорные цепи и цепи возбуждения двигателей главных приводов (1„.,1т. Двр. , i,., igr; iftBp ) цепи станции управления глав- ными приводами Sign а. Sign b. Sign с. Sign d, К другим входам вычислителя 6 (по цепи В) вводятся нормативно-справочные данные, характеризующие данный экскаватор и условия его работы (К,
нт, , 9 -нэо и о с J L, 1п„;,дд ,1йрк15« Гт1 С , Cf,, Dg , К, -Kg, Cgp , С.,., Хцп ,
17-/л . -1 Т
2и,т
,уК-1
-НЭЭ Э
нзэ «эз к.; ф
лп f п
Т 5 Н 13
5 5 i
-en
x-js ф
5 Т
THOM , 9 -ввр бр
ковша в i-M цикле экскавации. 20 По С, D узлы 7-9 связаны между
собой, а по цепи Е связаны между собой узлы 8-9.
Узел 7 вычислителя 6 содержит функциональные блоки 10-21, которые свя2 заны между собой и по цепям А, В, С, D с функциональными блоками узлов 8 и 9. Узел 8 вычислителя 6 содержит функциональные блоки 22-33, которые связаны между собой и по цепям А, В,
30 с, D с функциональными блоками узлов 7 и 9, а по цепи Е - с функциональными блоками узла 9. Узел 9 вы - числителя 6 содержит функциональные блоки 34-44, которые соединены между
35 I собой и функциональными блоками узлов 7 и 8.
Устройство работает следующим образом.
Q , В процессе экскавации в вычислитель 6 (фиг. 1) от датчиков 1-4 по цепям А, В поступают сигналы, характеризующие состояние экскаватора и его отдельных механизмов. В начале
заполнения ковша при выполнении условий (1) на выходе блока 10 (фиг. 2) формируется Sign А 1, которьй поступает на вход блока I3 и по цепи связи D в узлы 8 (фиг. 3) и 9 (фиг. 4).
Таким образом, использование предлагаемого способа в процессе экскавации позволяет формировать для машиниста экскаватора информацию, харак теризующую подготовленность горной массы к экскавации. При этом формируемый показатель не зависит от вида черпания, вида выполняемой работы и , профессиональных навыков машиниста экскаватора, т.е. его квалификации. Это обуславливает большую точность формирования информации, что необходимо для объективного планирования объемов работ, оценки качества буровзрывных работ и для осуществления объективного контроля фактически выполненной машинистом экскаватора работы как с количественной так и с качественной сторон.
Устройство, реализующее способ (фиг. 1), содержит датчик 1 угла на50
После заполнения ковша в начале его отрыва от забоя при соблюдении условий (6) на выходе блока 11 формируется Sign В 1, который поступает на вход блока 14 и по цепи связи D - в
клона плоскости поворотной платформы узлы 8 и 9. На выходе блока 13 формик горизонту в плоскости стрелы, датчик 2 угла поворота вала двигателя механизма подъема, датчик 3 угла поворота вала двигателя механизма тяги.
руется сигнал , пропорциональный длительности операции заполнения ковша - формула (11). Одновременно в процессе заполнения ковша на выходах
5
Ш
2983118
датчик 4 угла поворота вала двигателя механизма поворота платформы, выходной блок 5, вычислитель 6, содержащий связанные между собой узлы 7-9. Датчики 1-4 и выходной блок 5 подключены к вычислителю 6, к другим входам которого (по/ цепи А) подключены якорные цепи и цепи возбуждения двигателей главных приводов (1„.,1т. Двр. , i,., igr; iftBp ) цепи станции управления глав- . ными приводами Sign а. Sign b. Sign с. Sign d, К другим входам вычислителя 6 (по цепи В) вводятся нормативно-справочные данные, характеризующие данный экскаватор и условия его работы (К,
нт, , 9 -нэо и о с J L, 1п„;,дд ,1йрк15« Гт1 С , Cf,, Dg , К, -Kg, Cgp , С.,., Хцп ,
17-/л . -1 Т
2и,т
,уК-1
-НЭЭ Э
нзэ «эз к.; ф
лп f п
Т 5 Н 13
5 5 i
-en
x-js ф
5 Т
THOM , 9 -ввр бр
20 По С, D узлы 7-9 связаны между
50
После заполнения ковша в начале его отрыва от забоя при соблюдении условий (6) на выходе блока 11 формируется Sign В 1, который поступает на вход блока 14 и по цепи связи D - в
руется сигнал , пропорциональный длительности операции заполнения ковша - формула (11). Одновременно в процессе заполнения ковша на выходах
блоков 15-17 вырабатываются сигналы
М. , М„; , Мдр., пропорциональные сред- .ним значениям моментов на валах двигателей механизмов тяги, подъема, поворота платформы в процессе заполн§- ния ковша - формулы (13), (15) и (22) На выходах блоков 14 и 21 формируются сигналы, пропорциональные приращениям свисающих частей тягового (1тз и подъемного („,- ) канатов при заполнении ковша - формулы (12) и (14). Указанные сигналы поступают в узел 8 на блок 22, на выходе которого формируется сигнал , характеризующий работу, затраченную на загрузку ковша - формула (16). В процессе черпания блоки 39 и 40 узла 9 определяют вид черпания; верхнее черпание - Sign ВЧ 1, нижнее черпание (нормаль ное) - SignHHH 1 нижнее черпание (глубокое) - Sign НЧГ 1, которые определяются соответствующими условиями (35), (36) и (37). При транспортировке груженного ковша на выходе блока 20 вырабатывается сигнал t-r- - формула (26), характеризующий длительность его транспортировки. В начале разгрузки ковша при соблюдении условий (17) на выходе блока 12 формируется Sign С 1. Длительность транспортировки груженного trrp; и порожнего t-rnop; ковша определяется блоками 23 и 19 - формулы (27) и (31), источником сигналов времени при опре
делении t. , t-rrp; , ., служит
лок 18 времени. В процессе перемещения ковша на выходе блока 26 формируется сигнал, пропорциональный его абсциссе формула (30), который поступает в блок 25. На выходе блока 25 формируется сигнал, характеризующий величину координатного коэффициента К|, - формула (29), который поступает на вход блока 24 и на его выходе вырабатывается сигнал, пропорциональный массе груженого ковша формула (28). В период транспортировки груженного ковша, его разгрузки и транспортировки порожнего ковша на выходах блоков 27, 30 и 33 формируются сигналы, пропорциональные перемещениям ковша относительно каждого привода 2. , Фтгр; формулы (24), (25) и (23). В этот же период блоками 28, 3 и 29 формируются сигналы, пропорциональные средним моментам на вдлах приводов механизмов тяги (М„.), подъема (М. ) и .поворота
п
платформы (Мтер;) т.е. реализуются формулы (19), (20) и (21). Указанные сигналы с выходов блоков 27-31 и 33 поступают на входы блока 32, на выходе которого формируется сигнал, пропорциональный затраченной работе на транспортировку ковша А.. - формула (18). После разгрузки ковша в отвале блок 34 обеспечивает взвешивание порожнего ковша - формулы (28) - (30) в результате чего на выходе блока 35 формируется сигнал, пропорциональный количеству перемещенной горной массы в i-M цикле экскавации Р. - форму5 ла (32), В процессе перемещения ковша в пространстве на выходе блока 37 формируется сигнал, пропорциональный вертикальному.расстоянию между точкой схода подъемного каната с головного шкива и центром тяжести ковша (hj) формулы (33) и (34). В процессе экскавации на выходах блоков 41,..,,42 формируются сигналы, характеризующие вид работы Sign OP, l,...,Sign ОР, 1, при этом используется выходной сигнал блока 36 Sign OP i, который формируется при вьтолнении операций цикла экскавации а последовательности sign А В 1} . После окончания каждого цикла экскавации на выходе блока 43 формируется Sign , если обеспечивается выполнение операций в следующей последовательности {sign (sign . Блок 44 в процессе, экскавации за п циклов обеспечивает определение подготовленности горной массы к экскавации - формула (41), выходной сигнал с блока 44 по цепи F поступает на выходной блок 5 для ви- зуал ьного считывания и, при необходимости, фиксируется на каком-либо носителе информации.
, Следует заметить, что в качестве вычислителя может быть использована микроэвм или контроллер с соответствующими программными обеспечениями, реализующие указанные вьшислительные процедуры и их последовательность.
5
0
5
0
5
0
Формула из. обретения
Способ контроля процесса заполнения ковша экскаватора-драглайна, ос нованньй на измерении в процессе экскавации углов поворота валов двигателей механизмов подъема, тяги и поворота платформы, токов якорных цепей и цепей возбуждения указанных двигаn12983
телей, определении режима работы основных узлов и механизмов экскаватора, определении начала заполнения ковша и начала отрыва груженного ковша, измерении длительности операции за- полнения ковша, определении работы, затраченной на загрузку ковша, определении количества перемещенной горной массы в каждом цикле экскавации, контроле- выполнения цикла экскавации tO и подсчете выполненного числа циклов, отличающийся тем, что, с целью повышения точности за счет определения подготовленности горной массы к экскавации, измеряют в плос- f5 где п - число выполненных циклов зксI I12
при этом контролируют выполнение цикла экскавации как последовательное выполнение операции начала заполнения ковша, начала отрыва груженного ковша, начала разгрузки и начала заполнения ковша в последующем цикле экскавации, а подготовленность горной массы к экскавации по К-му виду основной работы определяют по формуле
П,
кости стрелы угол наклона плоскости поворотной платформы к горизонту, из- Ку - меряют приращение свисающей части подъемного каната при заполнении ков- Р, - ша, измеряют момент на валу двигате- 20 , ля механизма подъема в процессе заполнения ковшаj а затраченную на загрузку ковша работу определяют по суммар- A-j; ной работе приводов механизмов тяги и подъема ковша, определяют начало разгрузки ковша, определяют работу, затраченную приводами механизмов тяги, подъема и поворота платформы на транспортирование груженного ковша, его разгрузку, транспортирование по- 30 t,,t, - длительность операции заполне25
кавации;
поправочный коэффициент, учитывающий вид черпания; количество перемещенной горной массы в i-M цикле экскавации;
затраченная работа на загрузку ковш.а и транспортирование груженного ковша, его разгрузку и транспортирование порож- него ковша в i-м цикле вации;
рожнего ковша, определяют длительность транспортирования груженного ковша, операции его разгрузки и транспортирования порожнего ковша, определяют вид черпания и вид основной работы, 35
I о
Шг-I г-t г-I P ш Ш И у I т f
д 71 1
fri 4lpi 0 Кп ocJoeeMaohKW а«й « я eSlffiflfSignt/ Т t t
э тл -nl т т ftf ;| г| А 41 s
L Cr,U.,C.,Cr
I TTTiillJ
T| s 3 w 111 721 s| n ;s| «I mm
Ki, Kg KC KZ KI гцл У g гя zi гд g| я zsl fs г zfj
31
3r (. /p g) Зз| Зе 37 38 39 Щ
де п - число выполненных циклов зксI I12
при этом контролируют выполнение цикла экскавации как последовательное выполнение операции начала заполнения ковша, начала отрыва груженного ковша, начала разгрузки и начала заполнения ковша в последующем цикле экскавации, а подготовленность горной массы к экскавации по К-му виду основной работы определяют по формуле
е
П,
Ку - Р, - -j; ,,t, - длительность операции заполне
кавации;
поправочный коэффициент, учитывающий вид черпания; количество перемещенной горной массы в i-M цикле экскавации;
затраченная работа на загрузку ковш.а и транспортирование груженного ковша, его разгрузку и транспортирование порож- него ковша в i-м цикле вации;
НИН ковша и длительность транспортирования груженного ковша, операции его разгрузки и транспортирования порожнего ковша в i-M цикле экскавации.
ВСА
ЕF
ФигМ
Составитель И. Назаркина Редактор Е. Папп Техред Н.Глушенко Корректор м. Пожо
Заказ 867/29 Тираж 607Подписное
ВНИШШ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Цроизводственно-полиграфическое предприятие,- г. Ужгород, ул. Проектная,4
S




| название | год | авторы | номер документа |
|---|---|---|---|
| Способ автоматического учета основных показателей работы драглайна | 1986 |
|
SU1421830A1 |
| Способ автоматического учета основных показателей работы драглайна | 1983 |
|
SU1170058A1 |
| Способ контроля работы экскаватора-драглайна | 1983 |
|
SU1129398A1 |
| Способ оперативного измерения производительности экскаватора-драглайна | 1987 |
|
SU1585462A1 |
| Способ оценки качества управления экскаватором-драглайном | 1985 |
|
SU1344868A1 |
| Способ контроля и учета работы экскаватора-мехлопаты | 1987 |
|
SU1425277A1 |
| Способ оперативного контроля использования экскаватора-драглайна | 1986 |
|
SU1328451A1 |
| Способ управления разгрузкой ковша экскаватора-драглайна | 1987 |
|
SU1502723A1 |
| Способ оперативного измерения производительности экскаватора-драглайна | 1983 |
|
SU1084393A1 |
| Способ управления разгрузкой ковша экскаватора-драглайна | 1984 |
|
SU1199868A1 |


Изобретение относится к области автоматического измерения параметров работы экскаватора драглайна при выполнении вскрьшных бестранспортных работ. Цель изобретения - повышение точности контроля за счет определения подготовленности горной массы к экскавации. В процессе экскавации измеряют углы поворота валов двигателей механизмов (М) подъема, тяги и поворота платформы, токи якорных цепей и цепей возбуждения этих двигателей. Определяют режим работы основных узлов и М экскаватора. Определяют начало заполнения ковша (К) и начало отрыва груженного К. Затем измеряют длительность t% операции заполнения К и определяют работу, затраченную на загрузку К. Определяют количество Р. перемещенной горной массы в каждом цикле экс- кавации(ЦЭ). Контролируют вьшолнение ЦЗ и подсчитьшают выполненное число п циклов. В плоскости стрелы измеряют угол наклона плоскости поворотной платформы к горизонту, измеряют приращение свисающей части подъемного каната при заполнении К, измеряют момент на валу двигателя М подъема в процессе заполнения К. Затраченную на загрузку К работу А,. определяют по суммарной работе приводов М тяги и подъема К. Затем определяют начало разгрузки К и работу, затраченную при-о водами М тяги, подъема и поворота платформы на транспортирование груженного К, его разгрузку, транспортирование порожнего К А. . После этого определяют длительность транспор- ,., тирования груженного К, операции его разгрузки и транспортирования порожнего К и виды черпания и основной работы. При этом контролируют выполнение ЦЭ как последовательное выполнение операций начала заполнения К, начала О отрыва груженного К, начала разгруз- ки К и начала заполнения К в последующем ЦЭ. Подготовленность горной массы к экскавации по К-му виду основной работы определяют по формуле: П К„/п.ГРгмГ где К„ - поправочный коэффициент. (Л учитывающийвид черпания. 4 ил., табл.
| Авторское свидетельство СССР № 759670, кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для определения подготовленности горной массы | 1974 |
|
SU765469A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Способ контроля работы экскаватора-драглайна | 1983 |
|
SU1129398A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
