(N,-1) 1,5
трапецеидальной форме сечения а до момента заой высоты отвала количество ковотсыпаемой горной массы в кажрасчетной точке профиля отвала деляют так же, как и для треьной формы сечения отвала, а даэта величина постоянна и равна вине указанного значения,
принятый элеменQ Kj Пц const тарный объем горной массы, соответствующий элементарной площади сечения
5-25 принятое число
п циклов экскавации, соответствзтощее элементарному объему горной массы Qji коэффициент про порциональности } порядковый номер N. расчетной точки профиля отвала для вычисления угла Л od J число выполненные
п; циклов экскавации;
число циклов i экскавации в
расчетной точке профиля от вала
Лсб const - шаг приращения угла поворота платформы.
Способ по п.1, отличаю4. с я тем, что, операцию наи и
чала разгрузки ковша определяют как одновременное выполнение услог
ВИЙ
f 0,6 Ь„.
; /
1 1
Sign b
мим J
-кратчайшее расстст дение между центром тяжести движущегося ковша и условной осью стрелы экскаватора;
-проекция свисающей части подъемного каната на условную ось стрелы экскаватора;
VT, V,.
-скорости движения тягового и подъемного канатов;
Sign - при уменьшении якорного тока двигателя механизма тяги; угол окончания сектора разгрузки ковша.

| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления разгрузкой ковша экскаватора-драглайна | 1987 |
|
SU1502723A1 |
| Способ управления разгрузкой ковша экскаватора-драглайна | 1985 |
|
SU1263761A2 |
| Способ оперативного измерения производительности экскаватора-драглайна | 1987 |
|
SU1585462A1 |
| Способ контроля процесса заполнения ковша-экскаватора-драглайна | 1985 |
|
SU1298311A1 |
| Способ оперативного контроля использования экскаватора-драглайна | 1986 |
|
SU1328451A1 |
| Способ оценки качества управления экскаватором-драглайном | 1985 |
|
SU1344868A1 |
| Способ автоматического учета основных показателей работы драглайна | 1986 |
|
SU1421830A1 |
| Способ оперативного измерения производительности экскаватора-драглайна | 1983 |
|
SU1084393A1 |
| Способ контроля работы экскаватора-драглайна | 1983 |
|
SU1129398A1 |
| Способ автоматического учета основных показателей работы драглайна | 1983 |
|
SU1170058A1 |
1. СПОСОБ УПРАВЛЕНИЯ РАЗГРУЗКОЙ КОВША ЭКСКАВАТОРА-ДРАГЛАЙНА, включающий определение цикла экскава1щи, определение операций начала заполнения и отрыва груженого ковша от забоя с учетом измеренных токов якорной цепи двигателей механизмов подъема и тяги, тока цепи возбуждения механизма подъема, угла поворота платформы при заполнении ковша, длин свешивающихся частей тягового и подъемного канатов, состояния главных приводов экскаватора и с учетом углов начала и окончания сектора заполнения ковша, и подсчет числа выполненных циклов экскавации, отличающийся тем, что, с целью увеличения эксплуатационной производительности экскаватора за счет формирования команды на разгрузку ковша в отвале, задают углы начала и окончания сектора разгрузки ковша и элементарньй объем горной массы, соответствующий элементарной площади сечения отвала, принимают цикл экскавации как последовательное вьтолнение операций начала заполнения ковша, отрыва груженого ковша от забоя,начала разгрузки и начала заполнения ковша в последующем цикле экскавации, измеряют фактический угол поворота платформы с груженым ковшом, определяют необходимый угол переноса груженого ковша, а команду на разгрузку ковша формируют в момент равенства фактического угла поворота платформы экскаватора с груженым ковшом и необходимого угла переноса груженого ковша. с 2.Способ поп.1,отличающ и и с я тем, что необходимый (Л угол переноса груженого ковша рассчитывают по формуле . t.. .гр,е oi ми н угол начала сектора разгрузки ковша; сС ; - угол заполнения ковша; i ос J - текущее значение прира ;о щения угла поворота 00 платформы. 0д 3.Способ по п.2, отличающийся тем, что текущее значение сх приращения угла поворота платформы определяют по формуле Ло(.о{, ., где 1, если О п п 2, если Пд п- «:.П К. 3, если п 2 п;, п и так далее, при треугольной форме сечения отвала п. |i.)4 при прямоугольной форме сечения от. вала
Изобретение относится к контролю параметров выполненной работы и управления экскаватором-драглайном при ведении открытых горных работ. v
Цель изобретения - увеличение эксплуатационной производительности экскаватора за счет формирования команды на разгрузку ковша в отвале.
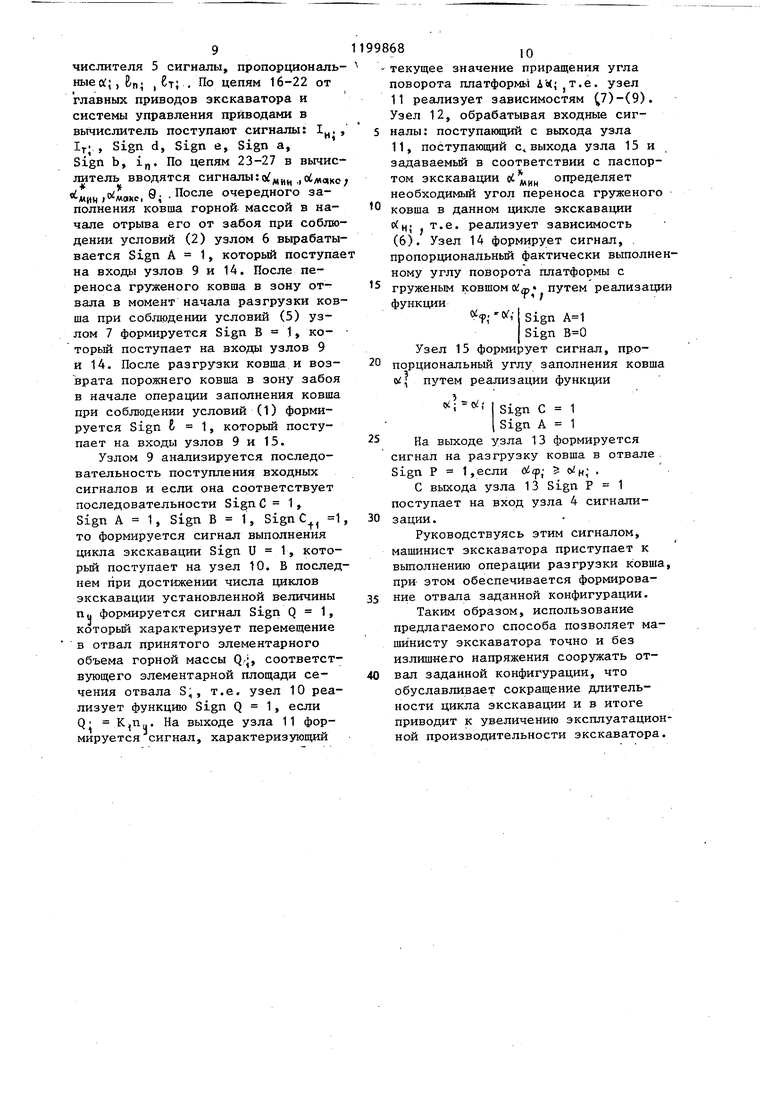
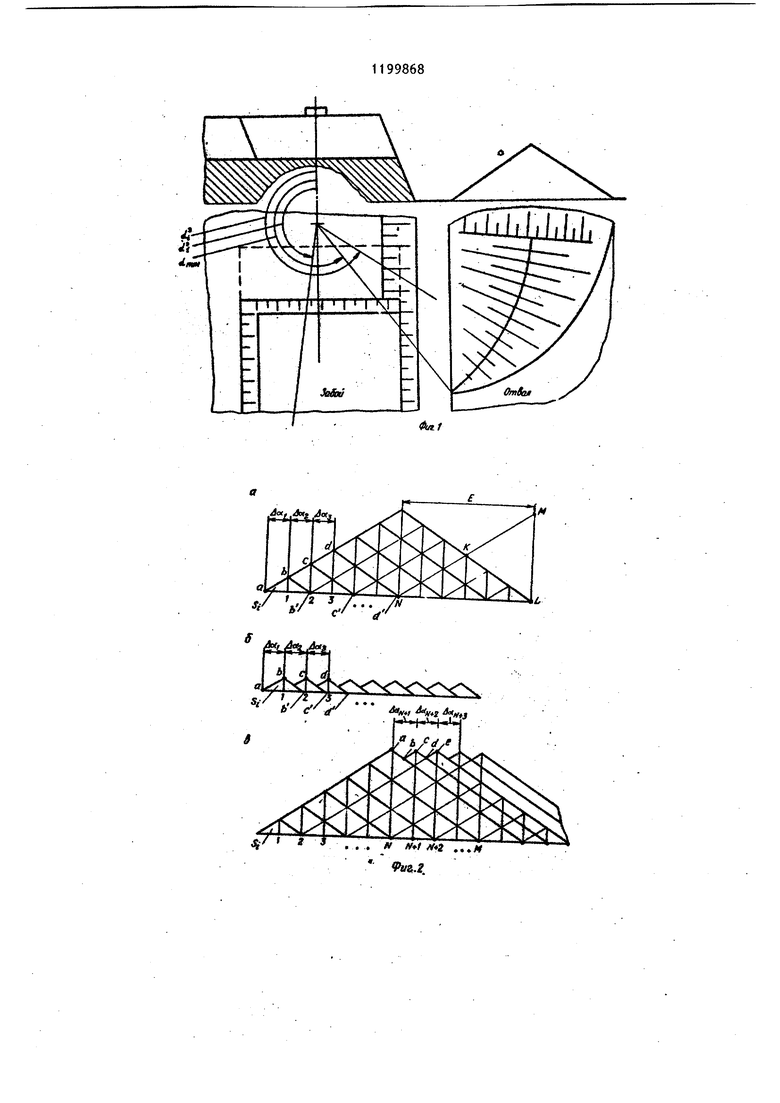
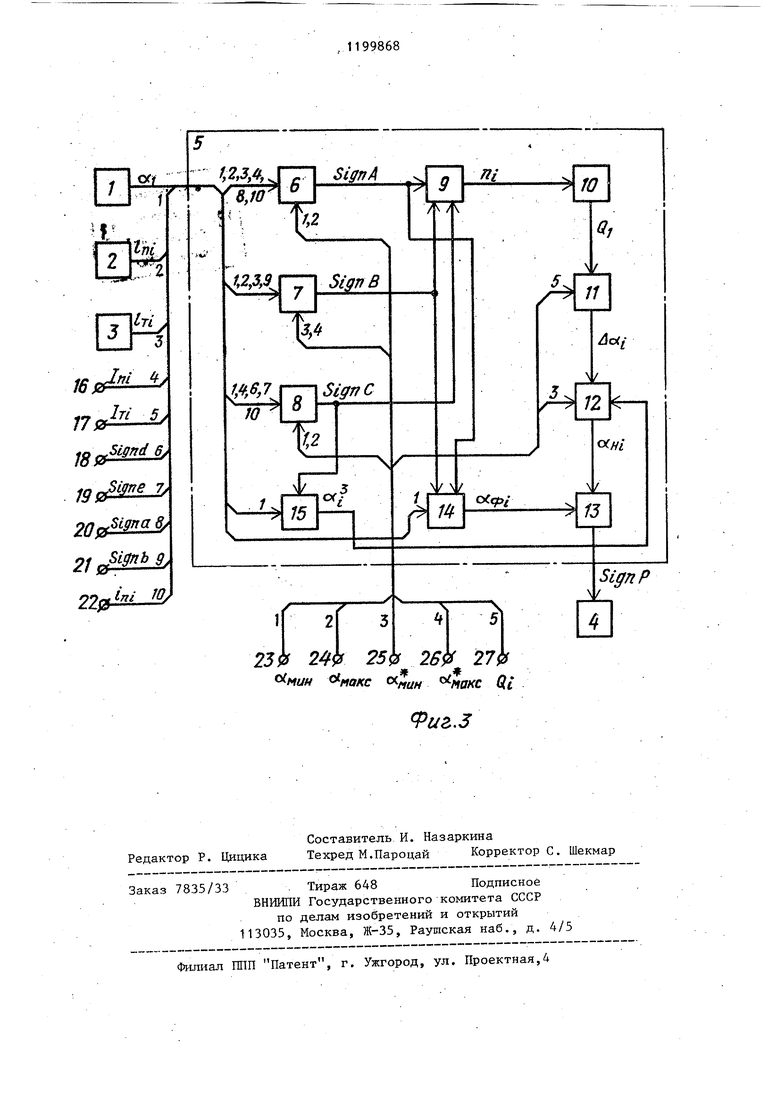
На фиг.1 показаны угловые парамет ры поворота платформы экскаватора при переносе груженого ковша , на фиг.2 - схемы формирования отвалов; на фиг.З - структурная схема системы, реализующей способ управления
загрузкой ковша экскаватора-драг лайна.
Предлагаемый способ включает следующие основные операции: измеряют ток якорной цепи двигателя механизма подъема 1ц , измеряют ток якорной цепи двигателя механизма тяги 1, , измеряют ток цепи возбуждения двигателя механизма подъема , измеряют длины свешивающихся частей тягового 6. и подъемного канатов с направляющих шкивов; определяют состояние главных приводов экскаватора: вращение двигателя ме-.
ханизма тяги в направлении, обеспечивающем наматывание каната на барабан (Sign ); увеличение якорного тока двигателя механизма тяги (Sign ); вращение двигателя механизма тяги в направлении, обеспечивающем сматывание каната с барабана (Sign ); уменьшение якорного тока двигателя механизма тяги (Sign ); устанавливают углы начала и окончания секторов з полнения (в:,, jOi-Moncc) разгрузки (мчн I макс) ковша , принимаю7 цикл экскавации, как последовательное выполнение начала операции заполнения ковша, отрыва груженого, ковша от забоя, начала разгрузки ковша в текущем цикле экскавации и начала операции заполнения ковша в последующем цикле экскавации, при этом операцию начала заполнения ковша SignC i определяют, как одновременное выполнение условий:
Sn; 0,5 Р,
Sign
Sign
С.1п.,-Уп;
где
- усилие в Ч° Dg/a подъемном канате;
V i In;Ji
- средний
( Ч( ti 1„:t,-i,
J
ток якорной цепи двигателя механизма подъема;
1п in;
- средний ма.г
Ф.СИ-е
ток возбуждения двигателя механикма подъема;
PIJ - магнитный поток насыщения двигателя механизма подъема;
i - постоянная характеристики намагничивания двигателя механизма подъема;
- ток возбуткдения двигателя механизма подъема;
tj-t, - интервал интегрировани q - число интервалов интегрирования;
1998684
РО - масса порожнего ковша;
Sign - при условии вращения двигателя механизма тяги в направлении, обеспечивающем наматывание 5 каната на барабан;
Sign - при увеличении якорного тока двигателя механизма тяги;
.« «WH , « лГакс начала и окончания сектора заполнения ковша. 10 Операцию отрыва груженого ковша от забоя Sign определяют, как , одновременное выполнение условий Sign а 1
- .6 Р
(2)
dd) 0,6
Ln
«мин о вмакс где Sign - при условии вращения
двигателя механизма тяги в направлении,
обеспечивающем сматывание каната с барабана
d-К-ь
(3) (4)
b(&n;-&r-,l
4i
j
аь
где В„. ,Sf. - длины свешивающихся частей подъемного и тягового канатов с направляющих шкивов; L - расстояние между точками схода тягового и подъемного канатов с направляю-, щих шкивов (условная ось среды экскаватора) .
Операцию начала разгрузки ковша Sign определяют как одновременное выполнение условий: J,
0,6
п;
(5)
1 Vr
Sign
мии- И макс J
где d- - кратчайшее расстояние между центром тяжести движущегося ковша и условной осью стрелы экскаватора i
L. - проекция свисающей части подъемного каната на условную ось стрелы экскаватора;
&«т; ье„VT; -ТП --г-:- - скоAt
.&t S рости движения тягового и подъемного канатов; Sign - при уменьшении якор но го тока двигателя механизма тяги °i мин I о макс У- начала и окон чания сектора разгрузки ковша. Измеряют угол поворота платформ при заполнении ковша ( ecf); Измеряют фактический угол поворота пла формы с груженьм ковшом («a,.)i выбирают элементарный объем массы, соответствующий элементарно шющади сечения отвала Q; К. «п и const где an 5-25 - принятое число цик лов экскавации К, - коэффициент пропор циональности, подсчитьтают фактически выполненно число циклов экскавации (п ), опре деляют необходимый угол переноса груженного ковша по формулам (6)(9): ««H- ll i - угол начала сектора раэ грузки ковша{ oi i - угол заполнения ковша j текущее значение приращ ния угла поворота платформыгде KjJ 1, если О jf п i Ki 2, если п, п К 3, если п., П; и так далее. При треугольной форме сечения о вала п |i- 2+(N;-1)4 при прямоугольной форме сечения от вала п |i 2.(Ni-1) 1,5 при трапецеидальной форме сечения от вала до момента достижения заданной высоты отвала количество ковшей отсыпаемой горной массы в каждой расчетной точке профиля отвала определяют так же, как и для треугольной формы сечения отвала, а далее эта величина постоянна и рав на половине указанного значения, где QJ К, Пц const - принятый элементарный объем горной массы. 86 соответствующий элементарной площади сечения отвала; Пц 5-25 - принятое число циклов экскавации, соответствующее элементарному объему горной массы Q;, К - коэффициент пропорциональностиN; - порядковый номер расчетной точки профиля отвала для вычисления приращения угла п J - число выполненньп циклов экскавации; Лоб const - шаг приращения угла поворота платформы J п - требуемое к отсылке число циклов экскавации в N -и расчетной точке профиля отвала. Действительноj при формировании отвала необходимый угол поворота платформы с груженым ковшом в i-M цикле экскавации определяется выражением (фиг.1) : о нГ«Мин- « -;, очевидно ). 0 («мин-- М ™ минь Ь т.е. в любом случае обеспечивается определение точки начала образующей отвала, из чего следует спра- , ведливость формулы (6). В зависимости от конфигурации сечения отвала (фиг.2) текущее значение приращения угла поворота платформы с груженым ковшом определяется по формуле (7), при этом для треугольной формы сечения отвала (фиг,2а): п § 2-b(N--1)-4l , к - J ; поскольку при Q; Пи - const и при QJ S , где S; - элементарная площадь сечения отвала в точке N 1, т.е. при углеДй, необходимо отсыпать 2Q; горной массы, чтобы образовался отвал треугольной формы с площадью сечения 2S| (фигура авб ), в точке N,- 2, т.е. при угле Л otj для образования отвала треугольной формы с площадью сечения 8 S необходимо отсыпать 6 Qj, что составит в сечении фигуру бес в; аналогичные рассуждения применимы и для всех последующих точек вплоть до вершины отвала. Очевидно, если расстояние Е между 7 . гребнями отвала треугольной формы меньше рдяны основания, то происходит подзасыпка предыдущим гребнем последукяцего гребня отвала. В этом случае в формулу (8) в соответствующей расчетной точке вводится дополнительный отрицательный член: например, в (Н-2)-й точке величина коррекции равна - 2; поскольку предьщущим гребнем образована подзасыпка величиной 2S-s2Q в (Н-1)-й точке величина коррекции равна - 6, поскольку величина подзасыпки равна 6S,- 6Q., в N-й точке коррекции равна - 10, так как имеет место 10S.; H10Q., т.е. корре ция в каждой точке определяется соответствующей частью сечения площади подзасыпки (фигура KNL, фиг.2а)-для прямоугольной формы от вала (фиг.26) очевидно следующее: в точке 1 Л oi; К 1, если 0,п;. 2Пу/ в точке 2 К 2, если 2Пиёп. ,1 /) - 3,5 „,; в точке 3 К 3, если 3,5 5Пц и так далее, т.е. имеет место формула (9), если при этом необходима послойная укладка горной массьГ с различными физико-механическими свойствами,то зависимость 9 пользуется соответсвующеечисло раз Дпя трапецеидальной формы отвала (фиг.2в) очеврздно следующее: п; рассчитьшается до N-й точки по фор муле (8), далее до М-й точки ппринимается равным половине величины, вычисленной по формуле (8). Если же имеет место подзасыпка предыдущим гребнем отвала последую щего гребня, то вычисленное значение п- корректируют по аналогии с ранее рассмотренным случаем подзасыпки отвала с треугольной формо сечения. Следовательно, в процессе экскавации в каждом цикле производится проверка соответствия фактически выполненного угла поворота платформы с груженым ковшом ( не обходимому углу переноса груженого ковша для данных условий экскавации Ы ц при этом в каждом цикле экскавации об,, - var и зависит от угла заполнения ковша «: и текущ го значения приращения угла поворо платформы Л в . 88 Определяют момент разгрузки ковша Sign Р 1, если гон;(10) Пример реализации способа показан на фиг.З. В состав комплекса технических средств входят датчики угла поворота платформы 1, длины подъемного каната 2, длины тягового каната 3, узел сигнализации 4 и вычислитель 5. Вычислитель 5 содержит узел 6 контроля выполнения операции отрыва груженого ковша от забоя, узел 7 контроля вьтолнения операции начала разгрузки ковша, узел 8 контроля выполнения операции начала заполнения ковша, узел 9 определения выполнения цикла экскавации, узел 10 контроля перемещения в отвал принятого элементарного объема горной массы, узел 11 определения приращения угла поворота платформы, узел 12 определения необходимого угла переноса груженого ковша в данном цикле экскавации, узел 13 формирования сигнала разгрузки ковша в отвале, узел 14 определения угла поворота платформы с груженым ковшом, узел 15 определения угла заполнения ковша. Датчики 1-3 и узел 4 связаны с вычислителем 5, который по цепям 16-22 подключен к якорным цепям двигателей механизмов подъема и тяги, к цепи возбуждения двигателя механизма подъема, к цепям системы управления двигателями механизмов подъема и тяги. По цепям 23-27 в вычислитель вводятся параметры, характеризукмдие процесс экскавации. В вычислителе 5 функциональные узлы связаны между собой следуклцим образом. Выходы узлов 6 и 7 подключены к входам узлов 9 и 14, выход узла 8 подключен к входам узлов 9и 15, выход узла 9 через узел 10подключен к соответствующему входу узла 11, выход которого подключен к одному входу узла 12, другой вход узла 12 связан с выходом узла 15. Выход узла 12 подключен к одному входу узла 13, другой вход которого подключен к выходу узла 14. Устройство работает следующим образом. В процессе экскавации с выходов датчиков 1-3 поступают на вход вы9числителя 5 сигналы, пропорхщональ Hbietf;,2.n. , 6т; , По цепям 16-22 от главных приводов экскаватора и системы управления приводами в вычислитель поступают сигналы: I. IT; , Sign d, Sign e, Sign a, Sign b, i. По цепям 23-27 в вычис оштель вводятся сигналы ,,/wqK Tf - - utHii MM, .После очередного заполнения ковша горной массой в начале отрыва его от забоя при соблю дении условий (2) узлом 6 вьфабаты вается Sign А 1, который поступа на входы узлов 9 и 14. После переноса груженого ковша в зону отвала в момент начала разгрузки ков ша при соблюдении условий (5) узлом 7 формируется Sign В 1, ко- торый поступает на входы узлов 9 и 14. После разгрузки ковша и возврата порожнего ковша в зону забоя в начале операции заполнения ковша при соблюдении условий(1) формируется Sign & 1, который поступает на входы узлов 9 и 15. Узлом 9 анализируется последовательность поступления входных сигналов и если она соответствует последовательности Sign С 1, Sign А 1, Sign В 1, SignC то формируется сигнал выполнения цикла экскавации Sign U 1, который поступает на узел 10. В послед нем при достижении числа циклов экскавации установленной величины Пц формируется сигнал Sign Q 1, которьй характеризует перемещение в отвал принятого элементарного объема горной массы Q., соответствующего элементарной площади сечения отвала S;, т.е. узел 10 реализует функцию Sign Q 1, если Q . На выходе узла 11 формируется сигнал, характеризующий 68 текущее значение приращения угла поворота платформь ДЫ т.е. узел 11 реализует зависимостям 7)-(9). Узел 12, обрабатывая входные сигналы: поступающий с выхода узла 11, поступающий с выхода узла 15 и задаваемый в соответствии с паспортом экскавации ciJ, определяет необходимый угол переноса груженого ковша в данном цикле экскавации о( н- J т.е. реализует зависимость (6). Узел 14 формирует сигнал, пропорциональный фактически выполненному углу поворота платформы с груженым ковшом Km путем реализации функции О.О, sign Sign Узел 15 формирует сигнал, пропорциональный углу заполнения ковша 0 путем реализации функции Sign С 1 Sign А 1 На выходе узла 13 формируется сигнал на разгрузку ковша в отвале Sign Р 1 ,если oi(f; 5 С выхода узла 13 Sign Р 1 поступает на вход узла 4 сигнализации. Руководствуясь этим сигналом, машинист экскаватора приступает к выполнению операции разгрузки ковша, при этом обеспечивается формирование отвала заданной конфигурации. Таким образом, использование предлагаемого способа позволяет машинисту экскаватора точно и без излишнего напряжения сооружать отвал заданной конфигурации, что обуславливает сокращение длительности цикла экскавации и в итоге приводит к увеличению эксплуатационной производительности экскаватора.
.Ах,
:Жр
V / V-V/
/ /Х-S/
%
. . . н г Аг.г ...yir
( .f
23:
CtnOKC (
25 26 27b Qi
9иг,.
| СПОСОБ АВТОМАТИЧЕСКОГО УЧЕТА ОСНОВНЫХ ПОКАЗАТЕЛЕЙ РАБОТЫ ДРАГЛАЙПА | 0 |
|
SU343043A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Способ контроля работы экскаватора-драглайна | 1983 |
|
SU1129398A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| , | |||
