V//////////////////,
оо со сд
СП
00
//////////////////
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ВЕРТИКАЛЬНОЙ ОТТЯЖКИ ПОЛОТНА НА АВТОМАТИЧЕСКОЙ ТРИКОТАЖНОЙ МАШИНЕ, ПРЕИМУЩЕСТВЕННО ПЛОСКОВЯЗАЛЬНОЙ | 1992 |
|
RU2078861C1 |
| Устройство для кантования изделий | 1990 |
|
SU1782877A1 |
| МЕХАНИЗМ ФИКСАЦИИ ГРУЗОЗАХВАТНОГО УСТРОЙСТВА | 1992 |
|
RU2035380C1 |
| Грузозахватное устройство | 1990 |
|
SU1736899A1 |
| Захват-кантователь | 1987 |
|
SU1472411A1 |
| АВТОМАТИЧЕСКОЕ ПРОТИВОУГОННОЕ УСТРОЙСТВО | 1972 |
|
SU360311A1 |
| Вилочный захват для пакетированных грузов | 1983 |
|
SU1152914A1 |
| Грузозахватное устройство | 1985 |
|
SU1324983A1 |
| Захватное устройство для грузов с отбортовочными элементами | 1983 |
|
SU1127837A1 |
| Автоматический захват | 1981 |
|
SU977358A1 |
Изобретение относится к подъемно- транспортному оборудованию, к устройствам захвата. Цель изобретения - повышение надежности при захвате груза с рабочих площадок с опорными поверхностями. Захватное устройство содержит раму 1 с шарнирно закрепленными на ней рычага- .ми 4. На основном плече каждого рычага 4 установлен копир 9, а на раме 1 планки 5, взаимодействующие с копирами 9. Свободное плечо каждого рычага 4 подпружинено пружиной 7. 3 ил.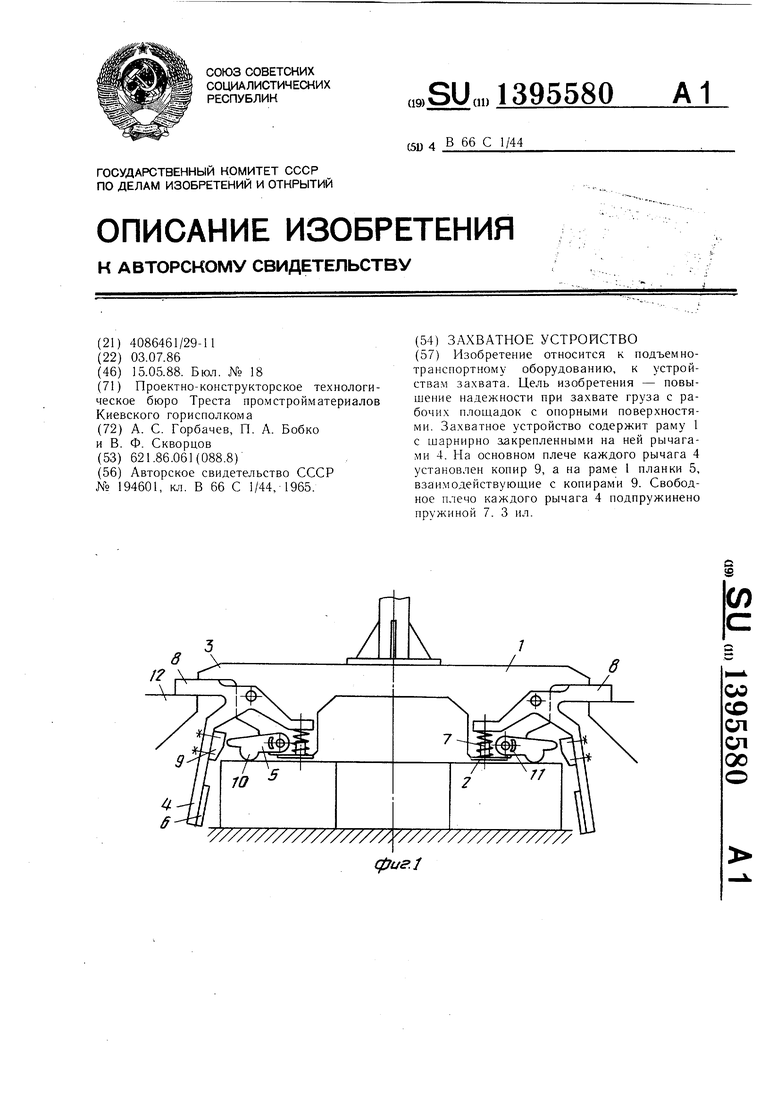
фиг.1
Изобретение относится к подъемно-транспортной технике, в частности к захватным устройствам.
Цель изобретения - повышение надежности при захвате груза с рабочих площадок с опорными поверхностями.5
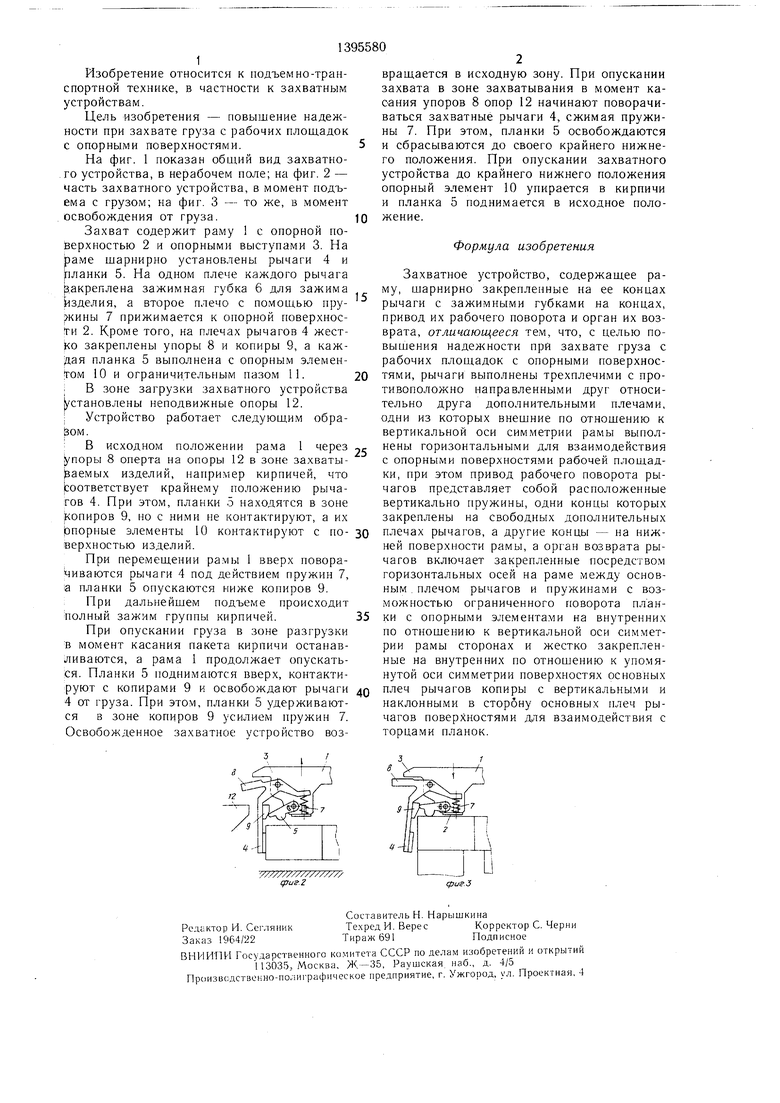
На фиг. 1 показан общий вид захватно- . го устройства, в нерабочем поле; на фиг. 2 - часть захватного устройстЕ а, в момент подъема с грузом; на фиг. 3 - то же, в момент освобождения от груза.Ю
Захват содержит раму с опорной поверхностью 2 и опорными выступами 3. На раме щарнирно установлены рычаги 4 и фланки 5. На одном плече каждого рычага р.акреплена зажимная губка 6 для зажима
вращается в исходную зону. При опускании захвата в зоне захватывания в момент касания упоров 8 опор 12 начинают поворачиваться захватные рычаги 4, сжимая пружины 7. При этом, планки 5 освобождаются и сбрасываются до своего крайнего нижнего положения. При опускании захватного устройства до крайнего нижнего положения опорный элемент 10 упирается в кирпичи и планка 5 поднимается в исходное положение.
Формула изобретения
Изделия, а второе плечо с помощью пру- кины 7 прижимается к опорной поверхности 2. Кроме того, на плечах рычагов 4 жест- ko закреплены упоры 8 и копиры 9, а каждая планка 5 выполнена с опорным элементом 10 и ограничительным пазом 11.20 тями, рычаги выполнены трехплечими с про- В зоне загрузки захватного устройства тивоположно направленными друг относиЗахватное устройство, содержащее раму, щарнирно закрепленные на ее концах рычаги с зажимными губками на концах, привод их рабочего поворота и орган их возврата, отличающееся те.м, что, с целью по- выщения надежности при захвате груза с рабочих площадок с опорными поверхнос становлены неподвижные опоры 12. I Устройство работает следующим обра- Вом.
В исходном положении рама 1 через г упоры 8 оперта на опоры 12 в зоне захваты- аемых изделий, например кирпичей, что соответствует крайнему положению рычагов 4. При этом, планки 5 находятся в зоне Копиров 9, но с ними не контактируют, а их
тельно друга дополнительными плечами, одни из которых внещние по отношению к вертикальной оси симметрии рамы выполнены горизонтальными для взаимодействия с опорными поверхностя.ми рабочей площадки, при этом привод рабочего поворота рычагов представляет собой расположенные вертикально пружины, одни концы которых закреплены на свободных дополнительных
опорные элементы 10 контактируют с по- ЗО плечах рычагов, а другие концы - на нижверхностью изделии.
При перемещении рамы 1 вверх повора- 1иваются рычаги 4 под действием пружин 7, а планки 5 опускаются ниже копиров 9.
При дальнейщем подъеме происходит полный зажим группы кирпичей.
При опускании груза в зоне разгрузки в момент касания пакета кирпичи останавливаются, а рама 1 продолжает опускатьнеи поверхности рамы, а орган возврата рычагов включает закрепленные посредством горизонтальных осей на раме между основным , плечом рычагов и пружинами с возможностью ограниченного поворота план- 35 ки с опорными элементами на внутренних по отношению к вертикальной оси симметрии рамы сторонах и жестко закрепленные на внутренних по отнощению к упомянутой оси симметрии поверхностях основных
;ся. Планки 5 поднимаются вверх, контактируют с копирами 9 и освобождаю г рычаги Qплеч рычагов копиры с вертикальными и 4 от груза. При этом, планки 5 удерживают-наклонными в сторону основных плеч рыся в зоне копиров 9 усилием пружин 7.чагов поверхностями для взаимодействия с Освобожденное захватное устройство воз-торцами планок.
7/////7/////////// tpus.Z
вращается в исходную зону. При опускании захвата в зоне захватывания в момент касания упоров 8 опор 12 начинают поворачиваться захватные рычаги 4, сжимая пружины 7. При этом, планки 5 освобождаются и сбрасываются до своего крайнего нижнего положения. При опускании захватного устройства до крайнего нижнего положения опорный элемент 10 упирается в кирпичи и планка 5 поднимается в исходное положение.
Формула изобретения
тями, рычаги выполнены трехплечими с про- тивоположно направленными друг относиЗахватное устройство, содержащее раму, щарнирно закрепленные на ее концах рычаги с зажимными губками на концах, привод их рабочего поворота и орган их возврата, отличающееся те.м, что, с целью по- выщения надежности при захвате груза с рабочих площадок с опорными поверхностельно друга дополнительными плечами, одни из которых внещние по отношению к вертикальной оси симметрии рамы выполнены горизонтальными для взаимодействия с опорными поверхностя.ми рабочей площадки, при этом привод рабочего поворота рычагов представляет собой расположенные вертикально пружины, одни концы которых закреплены на свободных дополнительных
неи поверхности рамы, а орган возврата рычагов включает закрепленные посредством горизонтальных осей на раме между основным , плечом рычагов и пружинами с возможностью ограниченного поворота план- ки с опорными элементами на внутренних по отношению к вертикальной оси симметрии рамы сторонах и жестко закрепленные на внутренних по отнощению к упомянутой оси симметрии поверхностях основных
плеч рычагов копиры с вертикальными и наклонными в сторону основных плеч рычагов поверхностями для взаимодействия с торцами планок.
фиг.З
| ЗАХВАТНОЕ УСТРОЙСТВО ДЛЯ СЪЕМА КИРПИЧА С ПРЕССА | 0 |
|
SU194601A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
