ости или положения нагрузки. В динамическом режиме обеспечивается уме 1ьшение продольной составляющей статор ного тока при постоянстве потокосцепления rto оси d и форсированное нарастание тока возбуждения it . Нарастание тока возбуждения приводит к форсированному изменению злектромагнитрого момента, определяемого вьфажени м 1, „ 1. 1 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для испытания механической трансмиссии | 1988 |
|
SU1585704A1 |
| Электропривод переменного тока | 1985 |
|
SU1264294A1 |
| ЭЛЕКТРОПРИВОД С СИНХРОННЫМ ДВИГАТЕЛЕМ | 1995 |
|
RU2092967C1 |
| Вентильный электропривод | 1987 |
|
SU1439727A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| Электропривод | 1983 |
|
SU1170575A1 |
| Электропривод | 1983 |
|
SU1167688A1 |
| Электропривод | 1987 |
|
SU1439729A1 |
| Электропривод переменного тока с частотно-токовым управлением | 1985 |
|
SU1310990A1 |
| Электропривод с асинхронным двигателем с фазным ротором | 1982 |
|
SU1083320A1 |
Изобретение относится к злектротехнике и может быть использовано в системах и механизмах oбщeпpo fiдпленного назначеш1я. Целью изобретение является повышение быстродействия за счет увеличения скорости изменения электромагнитного момента. Электропривод переменного тока содержит синхронный двигатель (СД) 1, датчик 4 угла и датчик 5 скорости, установленные на валу СД 1. В устройство входят также последовательно соединенные блок 7 преобразования координат, регулятор 6 тока, 3 мощности. У-ль 3 череэ датчик 2 тока подключен к статорной обмотке СД 1. Выход датчика 5 подключен к одному входу регулятора 9 скорости, другой вход которого соединен с задатчиком 8 скорости. Выход регулятора 9 подключен к управляющему входу блока 7 и к входу выпрямителя 10, выходом с S подключенного к первому входу блока (Л 12 сравнения. Второй вход блока 12 соединен с блоком 11 задания начального потокосцепления. Выход блока 12 подключен к дополнительному управлякицему входу блока 7, вход для гармонических функций которого соединен с датчиком 2 тока. В устройстве обеспечивается отработка заданной скои to со to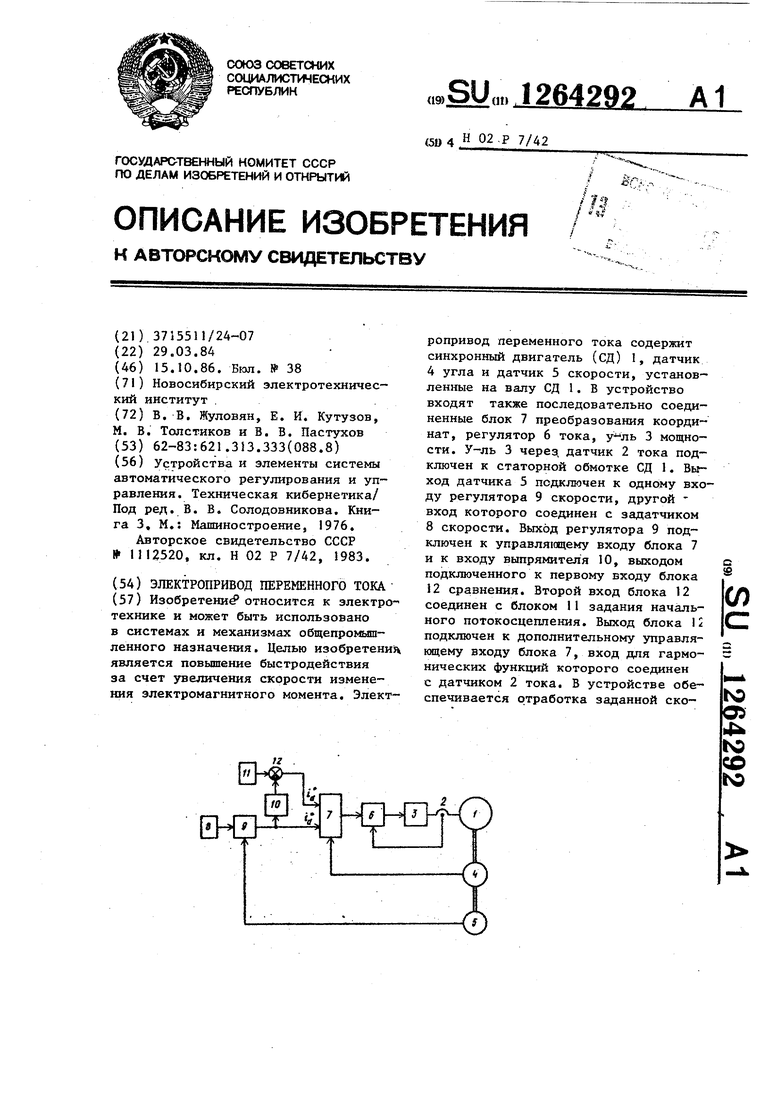
i
Изобретение относится -к электротехнике, а именно к управляемому электроприводу переменного тока, построенному на основе синхронного двигателя, и .может быть цспользовано в системах и механизмах общепромышленного назначения для регулирования скорости (положения) нагрузки с высокими требованиями по точности.
Целью изобретения яяляется повьшение быстродействия за счет увеличения скорости изменения электромагнитного момента синхронного двигателя.
На чертеже представлена функциональная схема электропривода перемен ного тока.
Электропривод переменного тока содержит синхронный двигатель 1, обмотка статора которого через датчик 2 тока статора подключена к выходу усилителя 3 мощности, датчики угла 4 и скорости 5, механически связанные с валом синхронного двигателя 1, регулятор 6 тока, подключенный выходом к управляющему входу усилителя 3 мощности, а первым входом - к выходу датчика 2 тока, блок 7 преобразования координат с управляющим входом и входом для гармонических функций, подключенным к выходу датчика 4 угла и последовательно соединенные задат- чик 8 скорости и регулятор 9 скорости, другой вход которого подключен к выходу датчика 5 скорости. Выход блока 7 преобразования координат соединен с вторым входом регулятора тока.
В электропривод переменного тока
введены вьшрямитель 10, блок 11 зада
ния начального потокосцепления, элемент 12 сравнения, а блок 7 преобразования координат снабжен дополнительным управляющим входом, подключенным к выходу элемента V2 сравнения
входы которого подключены к выходу блока 11 задания начального потокосцепления и к выходу вьшрямителя Ш, соединенного входом с выходом регулятора 9 скорости и управляющим входом блока 7 преобразования координат.
Электропривод переменного тока работает следующим образом.
Синхронньй двигатель 1 приводит в движение нагрузку. Для отработки заданной скорости (положения) в регуляторе 9 скорости производится сравнение сигнала задания, поступающего с выхода задатчика 8 скорости, с выходным сигналом датчика 5 скорости. В результате на выходе регулятора 9 скорости вырабатывается управляющее напряжение, в соответствии с которым формируется поперечная составляющая 1„ статорного тока. Это напряжение поступает на вход выпрямителя Ю и соответствующий вход блока 7 преобразования координат, на вход для гармонических функций которого поступают гармонические сигналы с датчика 4 угла, а на его вход задания прор,ольной составляющей Ii статорного тока подается сигнал с выхода элемента 12 сравнения. С выхода блока 7 преобразовация координат на вход регулятора 6 тока поступают синусоидальные сигналы задания фазных токов, амплитуда и фаза которых определяется соотнощением сигналов на его управляющих входах. Регулятор 6 тока управляет усилителем 3 мощности таким образом, чтобы фазные токи синхронного двигателя 1 соответствовали сигналам задания токов на входе регулятора 6 тока. Под действием возникающего электромагнитного момента синхронный двигатель 1 приводит в движение нагрузку и обрабатывает заданную скорость. Б электро3приводе отрабатывается положение нагрузки, если вместо датчика 5 скорости использовать датчик положения. При нулевом управляющем сигнале на выходе регулятора 9 скорости выходное напряжение блока 11 задания начального потскосцепления через элемент 12 сравнения поступает на управляющий вход блока 7 преобразова ния координат и создает дополнительный намагничивакиций поток по продоль ной оси, действую11(ий согласно с пото ком возбуждения, В динамических режимах при быстром изменении управляющего сигнала напряжение на выходе выпрямителя Ю растет, что приводит к резкому уменьшению продольной составлякицей Ij статорного тока, причем в соответ ствии с принципом постоянства потокосцепления потокосцеплёние ротора по оси d остается практически неиа- менным, т.е. форсированно нарастает ток возбуждения i. Темп роста тока ограничивается лишь индуктивностями рассеяния и г несколько раз превышает темп изменения поперечной составляющей la статорного тока. Так как электромагнитный момент сихронного двигателя определяется величиной произведения i|«I,,, то создание дополнительного начального потокосцеп ления и изменение продольной составляющей статорного тока Ij приводит к форсированному изменению электромагнитного момента двигателя в динамике и к повышению быстродействия предлагаемого электропривода в сравнении с известным. 924 Формула изобретения Электропривод переменного тока, содержащий синхронный двигатель, обмотка статора которого через датчик тока статора подключена к выходу усилителя мощности, датчики угла и скорости, механически связанные с валом синхронного двигателя, регулятор то-, ка, подключенный ыходом к управляющему входу усилителя мощности,.а первкм. входом - к выходу датчика тока, блок преобразования координат с управляющим входом и входом для гармонических функций, подключенным к выходу датчика угла, выход блока преобразования координат соединен с вторым входом регулятора тока, и задатчик скорости, выходом соединенный с одним входом регулятора скорости, другой вход которого подключен к выходу датчика скорости, отличающийся тем, что, с целью повышения быстродействия за счет увеличения скорости изменения электромагнитного момента синхронного двигателЯуВ него введены выпрямитель, блок задания начального потокосцепл1ййя и элемент сравнения, а блок преобразования координат снабжен дополнительным управляющим входом, подключеиньт к выходу элемента сравнения, входы которого подключены к выходу блока, задания начального потокосцепления и к выходу выпрямителя, соединенного входом с выходом регулятора скорости, и с управляющие входом блока преобразования координат.
| Устройства и элементы системы автоматического регулирования и управления | |||
| Техническая кибернетика/ Под ред | |||
| В | |||
| В | |||
| Солодовникова | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Электропривод | 1983 |
|
SU1112520A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
