1 1
Изобретение относится к вспомогательному оборудованию кузнечнопрессового производства, а именно к конструкциям ковочных манипуляторов.
Целью изобретения является повышение производительности и надежности ковочного манипулятора за счет снижения его подвижных масс.
На фиг,1 изображен ковочный манипулятор, общий вид в разрезе, на фиг.2 - разрез А-А на фиг.1{ на фиг.З - разрез Б-В на фиг.2.
На станине 1 ковочного манипулятора шарнирно закреплены оси рычагов 2 и 3, вертикальные плечи которых связаны между собой цилиндрами 4 наклона, а горизонтальные плечи через тяги 5 и 6 шарнирно связаны с боковыми платформами 7 и 8 коробчатого сечения, соединенными между собой поперечными валами 9 и 10. Одни из горизонтальных плеч передних рычагов 2 подперты штоком цилиндров 11 подъема, установленных в станине 1, а к другим шарнирно прикреплены тяги 5, снабженные двумя шарнирами со взаимно перпендикулярными осями.
На поперечных валах 9 и 10, проходящих через переднюю и заднюю опоры рамы 12 хобота с закрепленным на ней корпусом 13, связанным с планетарным редуктором 14 и гидромотором 15, установлены амортизаторы 16 и 17.
Боковые платформы 7 и 8 имеют плошадки для взаимодействия со штоками 18- и 19 цилиндров 20 и 21 бокового сдвига, закрепленных на раме 12 хобота. Оси штоков 18 и 19 находятся в одной горизонтальной плоскости с осями поперечных валов 9 и 10.
В подшипниках, установленных в раме 12 хобота и закрытых крьппками 22 и 23, расположен хобот 24 с клещами 25 и цилиндром 26 зажима.
711722
Для продольного перемещения хобо та 24 между станиной 1 и боковыми платформами 7 и 8 установлены цилиндры 27 осевой подачи. 5 Ковочный манипулятор работает следующ 1м образом.
При осевой подаче срабатывают цилиндры 27 осевой подачи, в результате чего боковые платформы
О 7 и 8 и связанные с ними рама 12 хобота, хобот 24 с цилиндром 26 зажима и клещами 25, в которых зажата поковка, перемещаются вдоль станины 1 манипулятора.
15 Так как масса перемещающихся узлов меньше, чем масса манипулятора, то время такого перемещения сокращается и, следовательно, увеличивается быстродействие. .Попереч-
20 ное перемещение осуществляется подачей рабочей жидкости в полость цилиндров 20 и 21 бокового сдвига, при зтом рама 12 хобота с Закрепленными на ней механизмами перемеща25 ется по поперечным валам 9 и 10, при этом масса узлов, участвующих, в боковом сдвиге, меньше массы узлов, участвующих в продольном перемещении, что дает увеличение быст30 родействия в подготовительных операциях и, следовательно, уменьшает время подготовки ковочного комплекса к самой ковке. Кроме того, расположение Цилиндров 20 и 21 бо,- кового сдвига в одной плоскости с поперечными валами 9 и 10 позволяет снизить расположение продольной оси манипулятора и уменьшить его габариты по высоте.
40 Наличие двойного шарнира со взаимно перпендикулярными осями позволяет разгрузить подвеску от усилий, вызьшаемых прессом, и, следовательно, уменьшить ее вес.
5 Использование изобретения позволяет повысить производительность и надежность ковочного манипулятора за ; счет снижения его подвижных масс. б- S noSeflHymo
Фиг. г. 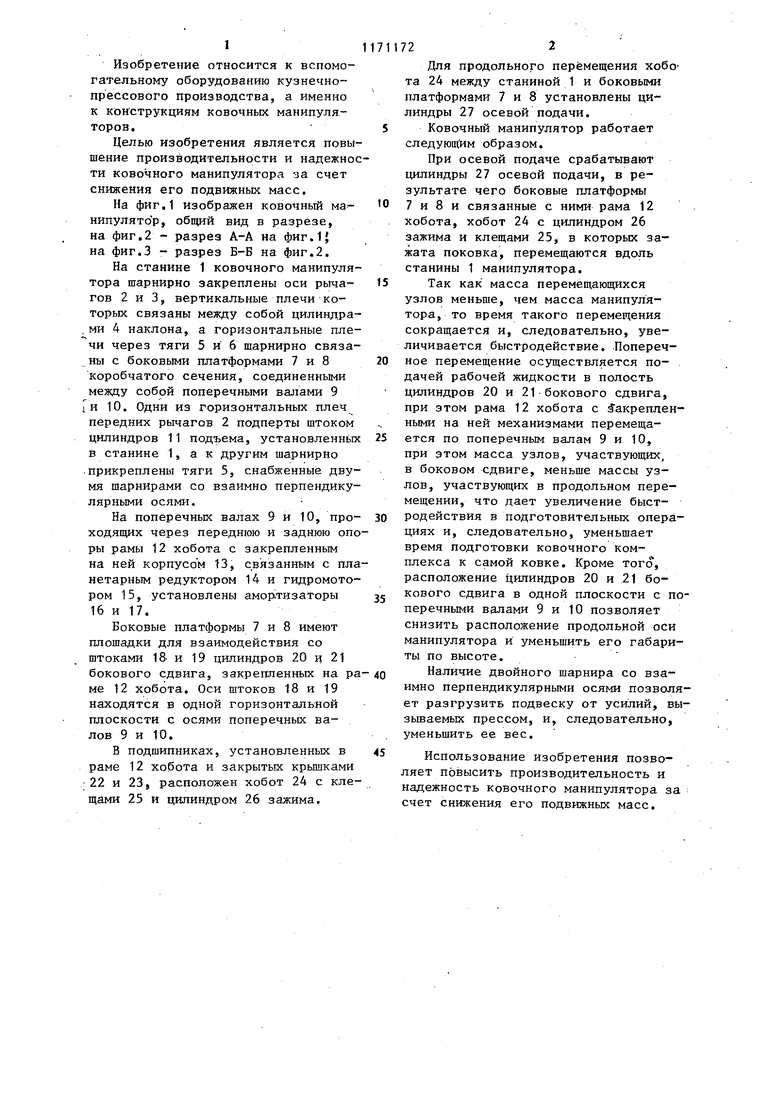
| название | год | авторы | номер документа |
|---|---|---|---|
| КОВОЧНЫЙ МАНИПУЛЯТОР | 1990 |
|
RU2010661C1 |
| Ковочный манипулятор | 1979 |
|
SU848138A1 |
| Ковочный манипулятор | 1981 |
|
SU996036A1 |
| Ковочный манипулятор | 1983 |
|
SU1082542A1 |
| Механизм изменения высоты подъема хобота ковочного манипулятора | 1981 |
|
SU979012A1 |
| Ковочный манипулятор | 1980 |
|
SU935196A1 |
| Ковочный манипулятор | 1980 |
|
SU893385A1 |
| Ковочный манипулятор | 1975 |
|
SU564080A1 |
| КОВОЧНЫЙ НАПОЛЬНЫЙ МАНИПУЛЯТОР | 1973 |
|
SU407622A1 |
| Механизм зажима клещей хобота ковочного манипулятора | 1978 |
|
SU759192A1 |
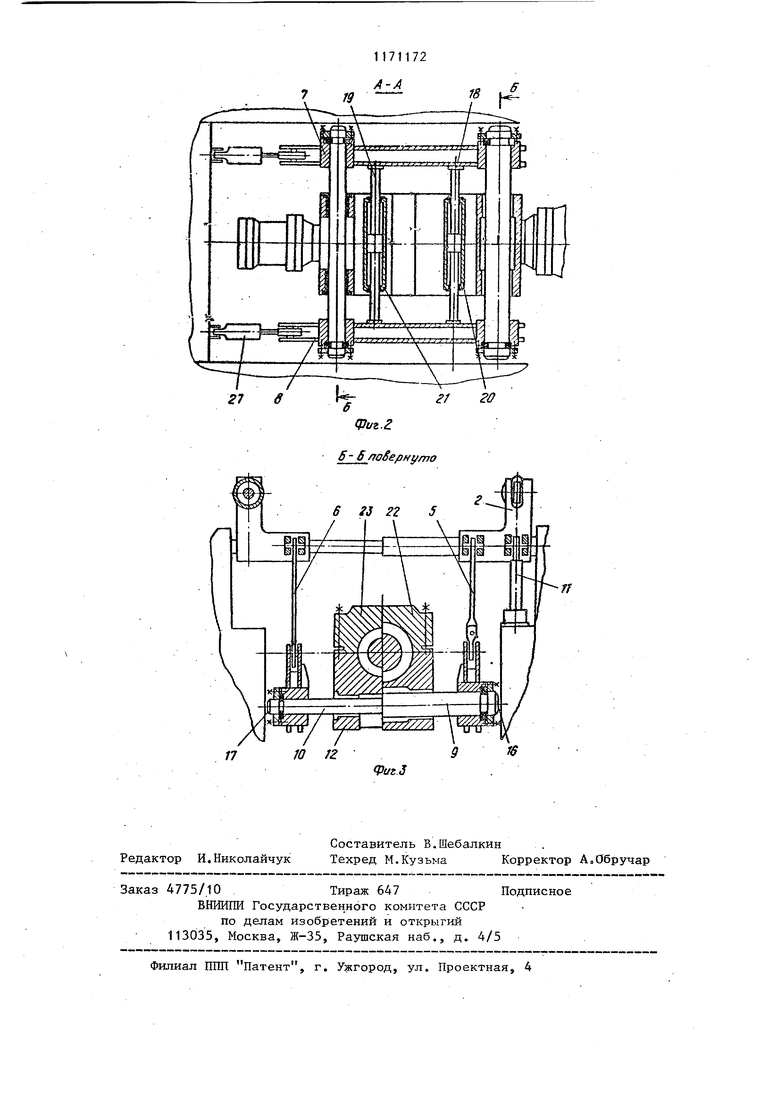
КОВОЧНЬЙ МАНИПУЛЯТОР, со держащий станину, наружную раму,с занную со станиной при помощи рычажной подвески, соединенной с си выми цилиндрами подъема, внутренн раму с хоботом и силовые цилиндры бокового сдвига внутренней рамы, отличающийся тем, что, с целью повышения производителъности и надежности за счет снижения подвижных масс, наружная рама выполнена в виде двух платформ коробчатого сечения и поперечных в-алов, жестко связанных с платформами и свободно проходящих через внутреннюю раму, а силовые цилиндры бокового сдвига внутренней рамы закреплены на последней и расположены в плоскости поперечных валов с возможностью взаимодействия своими штоками с платформами наружной рамы. 4 /J К
| Манипулятор фирмы Davy-Loewy LTD, чертеж 218635 | |||
| Шеститрубный элемент пароперегревателя в жаровых трубках | 1918 |
|
SU1977A1 |
