(54) КОВОЧНЫЙ МАНИПУЛЯТОР
| название | год | авторы | номер документа |
|---|---|---|---|
| Подвесной ковочный манипулятор | 1979 |
|
SU977095A1 |
| Передняя подвеска хобота ковочногоМАНипуляТОРА | 1979 |
|
SU816656A1 |
| Механизм вращения хобота ковочного манипулятора | 1982 |
|
SU1038052A1 |
| КОВОЧНЫЙ МАНИПУЛЯТОР | 1990 |
|
RU2010661C1 |
| Хобот ковочного манипулятора | 1977 |
|
SU725773A1 |
| ППРГГОНПГП МЯПГИНПГТППРНИа\i'l N' ^'siv.a»oT^:MБ. А. Челищевпрессового машиностроения | 1970 |
|
SU271261A1 |
| Ковочный манипулятор | 1983 |
|
SU1171172A1 |
| Ковочный манипулятор | 1975 |
|
SU564080A1 |
| Устройство осевого перемещения хобота ковочного манипулятора | 1971 |
|
SU682317A1 |
| КОВОЧНЫЙ НАПОЛЬНЫЙ МАНИПУЛЯТОР | 1973 |
|
SU407622A1 |
1
Изобретение относится к вспомогательному оборудованию кузнечно-штамповочного производства, а именно к конструкциям кузнечных манипуляторов.
Известен ковочный манипулятор, содержащий корпус, хобот с клещами, связанный с корпусом посредством подвески, включающей щаровые шарниры и гидроцилиндры перемещения хобота, систему управления гидроцилиндрами и механизмы вращения и зажима клещей 1.
Недостатком известного ковочного манипулятора является низкая производительность при ковке из-за совместного перемещения хобота с подвеской больщой массы.
Цель изобретения - повыщение производительности работы манипулятора путем снижения массы перемещающихся с хоботом элементов.
Поставленная цель достигается тем, что ковочный манипулятор, содержащий корпус, хобот с клещами, связанный с корпусом посредством подвески, включающей шаровые шарниры и гидроцилиндры перел ещения хобота, систему управления гидроцилиндрами и механизмы вращения и зажима клещей, снабжен двумя группами гидроцилиндров, гидроцилиндры каждой группы установлены спереди и сзади хобота симметрично его продольной оси и связаны с рамой, а их щтоки - с хоботом посредством шаровых шарниров, расстояние
5 между которыми на хоботе вдоль его оси меньше, чем на корпусе, при этом каждый гидроцилиндр снабжен датчиком перемещения штока, связанным с системой управления гидроцилиндрами.
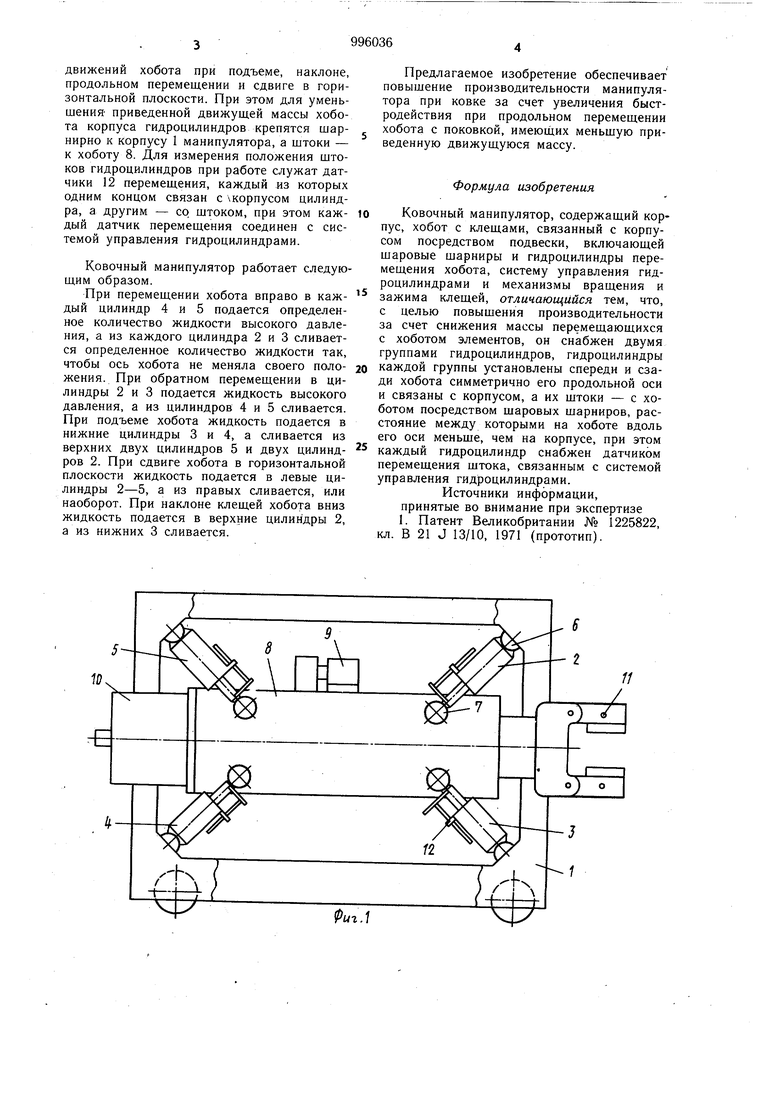
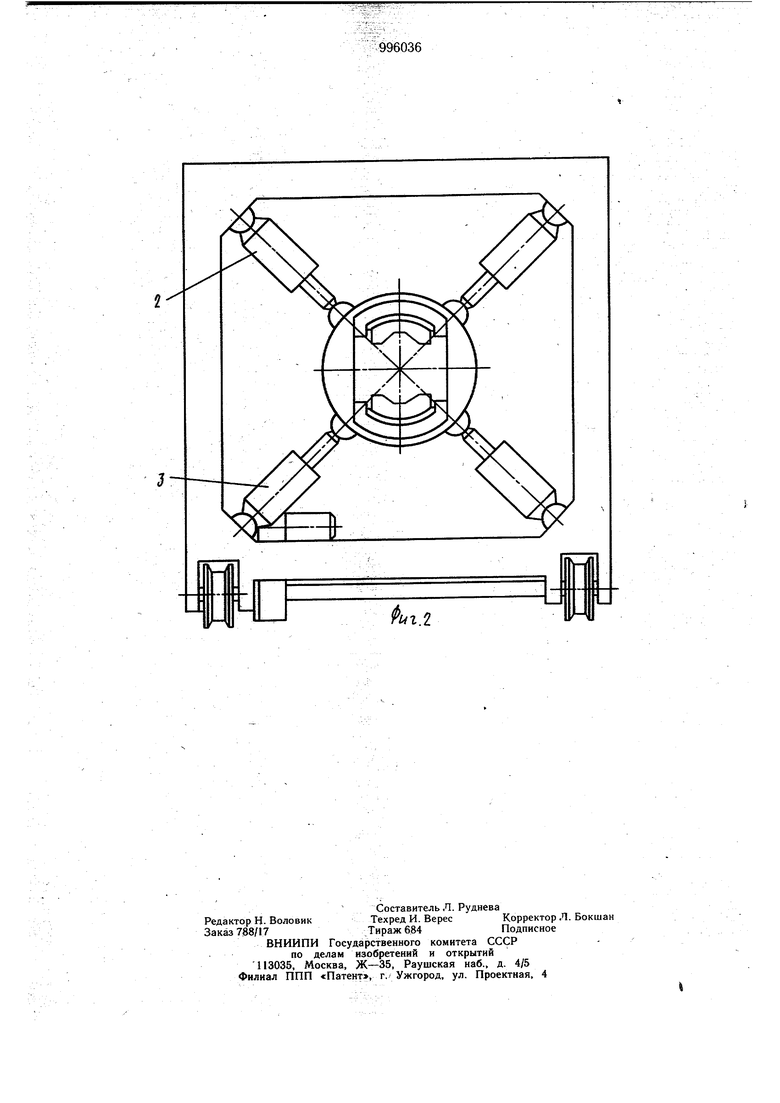
На фиг. 1 изображен ковочный, манипу10лятор, общий вид; на фиг. 2 - то же, вид спереди.
На корпусе 1 ковочного манипулятора с помощью гидроцилиндров 2-5 и щаррвых шарниров 6 и 7, подвешен хобот 8 с меха15 низмами 9 вращения, и зажима 10 клещей 11. На внутренней поверхности корпуса установлены две группы по четыре симметрично расположенных шаровых шарниров 6, а на внешней поверхности хобота 8 две группы аналогичных шаровых
20 шарниров 7, смещенных относительно первых двух групп к центру манипулятора. Это обеспечивает расположение гидроцилиндров под определенным углом наклона к поверхности хобота для обеспечения всех движений хобота при подъеме, наклоне, продольном перемещении и сдвиге в горизонтальной плоскости. При этом для уменьшения- приведенной движущей массы хобота корпуса гидроцилиндров крепятся шарнирно к корпусу 1 манипулятора, а штоки - к хоботу 8. Для измерения положения штоков гидроцилиндров при работе служат датчики 12 перемещения, каждый из которых одним концом связан с корпусом цилиндра, а другим - со. щтоком, при этом каждый датчик перемещения соединен с системой управления гидроцилиндрами. Ковочный манипулятор работает следующим образом. При перемещении хобота вправо в каждый цилиндр 4 и 5 подается определенное количество жидкости высокого давления, а из каждого цилиндра 2 и 3 сливается определенное количество жидкости так, чтобы ось хобота не меняла своего положения. При обратном перемещении в цилиндры 2 и 3 подается жидкость высокого давления, а из цилиндров 4 и 5 сливается. При подъеме хобота жидкость подается в нижние цилиндры 3 и 4, а сливается из верхних двух цилиндров 5 и двух цилиндров 2. При сдвиге хобота в горизонтальной плоскости жидкость подается в левые цилиндры 2-5, а из правых сливается, или наоборот. При наклоне клещей хобота вниз жидкость подается в верхние цилиндры 2, а из нижних 3 сливается.
V
t/
Г2
ыгЛ Предлагаемое изобретение обеспечивает повыщение производительности манипулятора при ковке за счет увеличения быстродействия при продольном перемещении хобота с поковкой, имеюш,их меньщую приведенную движущуюся массу. Формула изобретения Ковочный манипулятор, содержащий корпус, хобот с клещами, связанный с корпусом посредством подвески, включающей щаровые шарниры и гидроцилиндры перемещения хобота, систему управления гидроцилиндрами и механизмы вращения и зажима клещей, отличающийся тем, что, с целью повыщения производительности за счет снижения массы перемещающихся с хоботом элементов, он снабжен двумя группами гидроцилиндров, гидроцилиндры каждой группы установлены спереди и сзади хобота симметрично его продольной оси и связаны с корпусом, а их щтоки - с хоботом посредством щаровых шарниров, расстояние между которыми на хоботе вдоль его оси меньще, чем на корпусе, при этом каждый гидроцилиндр снабжен датчиком перемещения штока, связанным с системой управления гидроцилиндрами. Источники информации, принятые во внимание при экспертизе 1. Патент Великобритании № 1225822, кл. В 21 J 13/10, 1971 (прототип).
