1
Изобретение относится к обработке металлов давлением н может быть использовано нри создании средств механизации и автоматизации.
Известен ковочный напольный манипулятор, содержащий тележку и установлевную на ней на амортизаторах раму с хоботом.
Однако у известных манипуляторов иередняя подвеска механизма подъема хобота загружена дополнительной реакцией от действия опрокидывающего момента. При этом нагрузки в процессе ковки на элементы хобота и подвески оказываются повышенными, что снижает их срок службы.
Целью изобретения является увеличение долговечности манипулятора.
Для этого он снабжен механизмом разгрузки от опрокидывающего момента, выполненным в виде двух пар щарнирносоединенных соответственно с верхней и нижней частями рамы зубчатых реек-тяг и кинематически с ними связанных и расположенных в корпусе тележки по одну сторону от каждой HJ реек зубчатых колес, соединенных между собой бесконечными цепями, а также силового цилиндра, шток которого связан с жестлой пленкой, закрепленной на цепях.
Изобретение пояснено чертежами.
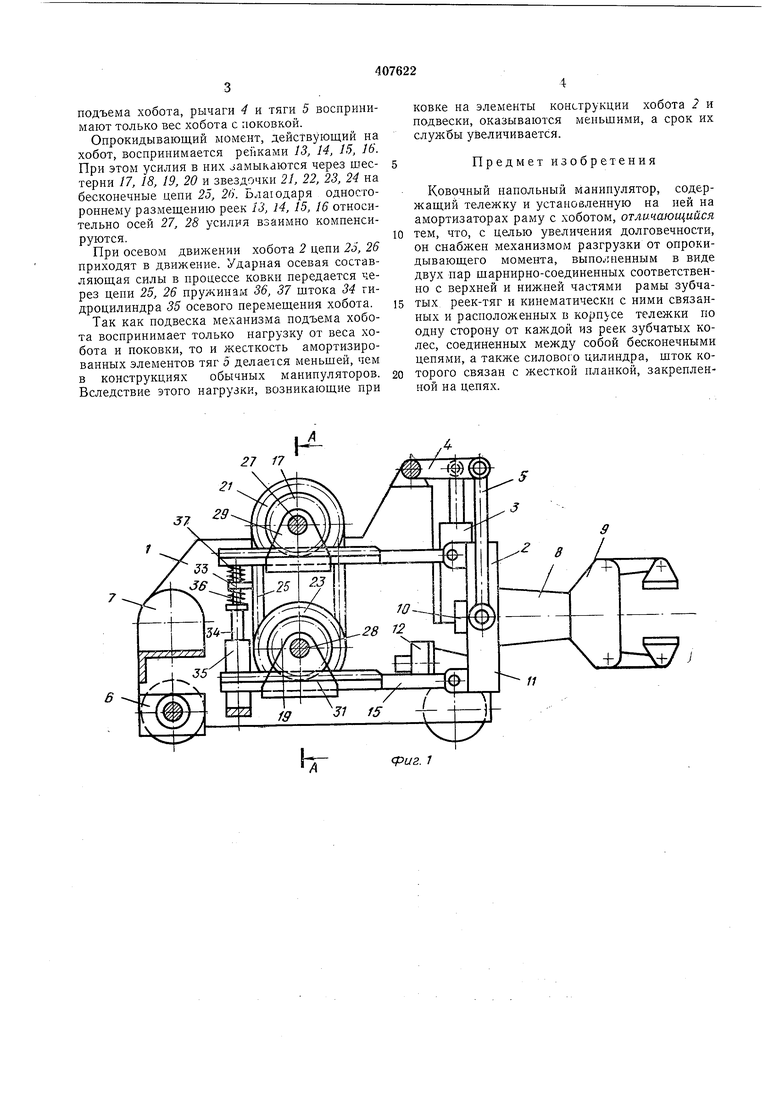
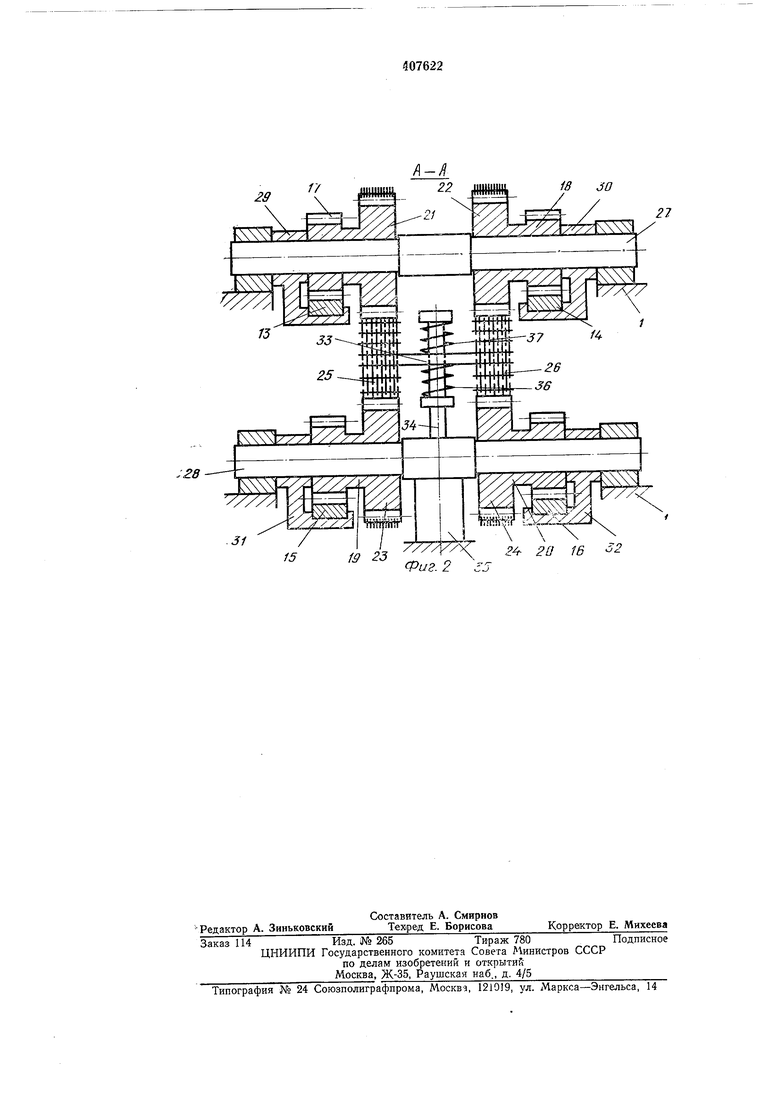
На фиг. I приведена конструкция манипулятора; на фиг. 2 - разрез Л-А.
Ковочный напольный манипулятор содержит тележку 1, хобот 2, гидроцилиндры 3 механизма подъема хобота, рычаги 4, амортизированные тяги 5, механизм 6 передвижения тележки, гидростанцию 7. Хобот 2 выполнен в виде корпуса 8 с клещами J и механизмом зажима 10, которые размещены внутри обоймы // на опоре вращения. На обойме // установлен механизм 12 вращения клещей 9. В верхней и нижней части обоймы 11 щарнирно закреплены рейки 13, 14, 1о, 16 (см. фиг. 2), находящиеся в зацеплении с шестернями 17, 18, 19, 20, выполненными в блоке со звездочками 21, 22, 23, 24, которые охватываются двумя бесконечными цепями 25, 26. Обойма 11 по сси соединяется с амортизированными тягами 5. Блоки щестерен со звездочками насажены на оси 27, 28, закрепленные на тележке /. Рейки 13, 14, 15, 16 поддерживаются серьгами 29, 30, 31, 32, установленными на осях 27, 28. Бесконечные цепи 25, 26 соединены между собой планкой 33, внутри которой пропущен шток 34 гидроцилиндра 35. осевого перемещения хобота, амортизированных пружинами 36, 37.
Манипулятор работает следующим образом.
Поковка захватывается механизмом зажима 10 клещами 9 и устанавливается в нужное угловое положение механизмом 12 вращения клещей 9. Вертикальное перемещение хобота 2 с поковкой осуществляется посредством гидроцилиндров 3. Гидроцилиндры 3 механизма
подъема хобота, рычаги 4 и тяги 5 воспринимают только вес хобота с поковкой.
Опрокидывающий момент, действующий на хобот, воспринимается рейками 13, 14, 15, 16. При этом усилия в них замыкаются через шестерни 17, 18, 19, 20 и звездочки 21, 22, 23, 24 на бесконечные цепи 2о, 26. Благодаря одностороннему размещению реек 13, 14, 15, 16 относительно осей 27, 28 усилия взаимно компенсируются.
При осевом движении хобота 2 цени 26, 26 приходят в движение. Ударная осевая составляющая силы в процессе ковки передается через цепи 25, 26 пружинам 36, 37 штока 34 гидроцилиндра 35 осевого перемещения хобота.
Так как подвеска механизма подъема хобота воспринимает только нагрузку от веса хобота и поковки, то и жесткость амортизированных элементов тяг 5 делается меньшей, чем в конструкциях обычных манипуляторов. Вследствие этого нагрузки, возникающие при
ковке на элементы конструкции хобота 2 и подвески, оказываются меньшими, а срок их службы увеличивается.
Предметизобретения
Ковочный напольный манипулятор, содержащий тележку и установленную на ней на амортизаторах раму с хоботом, отличающийся
тем, что, с целью увеличения долговечности, он снабжен механизмом разгрузки от опрокидывающего момента, выполненным в виде двух пар щарнирно-соединенных соответственно с верхней и нижней частями рамы зубчатых реек-тяг и кинематически с ними связанных и расположенных в корпусе тележки по одну сторону от каждой из реек зубчатых колес, соединенных между собой бесконечными цепями, а также силово о цилиндра, шток которого связан с жесткой планкой, закрепленной на цепях.
| название | год | авторы | номер документа |
|---|---|---|---|
| в ПТБФОеД eHGIEF'i | 1973 |
|
SU408702A1 |
| КОВОЧНЫЙ МАНИПУЛЯТОР | 1990 |
|
RU2010661C1 |
| Устройство осевого перемещения хобота ковочного манипулятора | 1976 |
|
SU1038051A1 |
| Подвесной ковочный манипулятор | 1979 |
|
SU977095A1 |
| Ковочный манипулятор | 1975 |
|
SU564080A1 |
| Устройство осевого перемещения хобота ковочного манипулятора | 1982 |
|
SU1053949A1 |
| Ковочный напольный манипулятор | 1974 |
|
SU493087A1 |
| Подвесной ковочный манипулятор | 1978 |
|
SU706176A1 |
| Передняя подвеска хобота ковочногоМАНипуляТОРА | 1979 |
|
SU816656A1 |
| Устройство осевого перемещения хобота ковочного манипулятора | 1971 |
|
SU682317A1 |
(риг. 7 2 тщ 18 Фиг. 2 JO
