г,7
ю
-s|
Сл
ю я Изобретение относится к области автоматизации производственных процессов обработки штучных объектов, а именно к автоматизации операций, связанных с ориентированной подачей штучных объектов из навалл, и может быть использовано в качестве автономного оборудования или составньк частей машин и автоматов, связанньк с обработкой, расфасовкой, упаковкой, кассетированием или контролем широкой номенклатуры полуфабрикатов и изделий, например, в машиностроении. Цель изобретения - расширение те нологических возможностей за счет регулирования и управл,ения потоком заготовок в зоне их извлечения из навала На чертеже показана схема предла гаемого устройства„ Поовротная платформа 1, снабженная приводом 2 ее поворота и приводом 3 фиксации тары 4, закреплена над бункером 5 с возможностью повор та тары над ним. Дно бункера состои из двух частей, одна из которых (6) подвижна. Часть б дна бункера прикреплена шарнирно к вертикальной стенке бункера 7,, противолежащей захватно-ориентирующаму органу 8, И установлена с возможностью поворота в вертикальной плоскости. Привод 3 вьшолнен в виде шарнирно закрепленного под платформой -1 силово го цилиндра, шток которого связан с фиксирующей цепью, обхватывающей тару 4. Поворот подвижной части 6 дна бункера производят приводом 9, шарнирно связанным с ней. Подвижная часть 6 дна бункера имеет коробчатую форму и отстоит из нижёрасположенного торца захватно-ориентйрующе органа 8 на величину его радиуса. Неподвижная часть 10 дна бункера со пряжена с нижерасположенным торцом захватно-ориентйрующего органа 8. Захватно-ориентирующий орган 8 выполнен в виде цилиндра с винтовыми пазами 11 на внутренней поверхности и связан с приводом 12 его вращения вокруг оси 13, наклоненной на угол () . Стенки винтовых пазов расположены друг от друга на рассто янии, исключающем многослойное западание между ними заготовок 14. Со сторЪны, противоположной бункеру 5, захватно-ориентирующий орган сопряжен с приемником 15. Приемник 15 снабжен счетчиками вьщаваемых ориентированных заготовок, связанными с системой управления устройством (не показаны). Устройство работает следугацем образом. Тара 4, заполненная заготовками 14, устанавливается на платформу 1 с использованием цеховых средств механизации. При включении привода 3 цепи натягиваются и тара 4 фиксируется на платформе 1. Пересыпание заготовок 14 из зафиксированной тары 4 в бункер 5 обеспечивается включением привода 2 поворота платформы 1. Величина пересыпаемой дозы настраивается в зависимости от скорости захватноориентирукяцего органа 8 с таким расчетом, чтобы в зоне извлечения заготовок они располагались в несколько слоев. Одновременно с включением привода 12 вращения захватно-ориентйрующего органа вьщается команда на работу привода 9 подъема (опускания) подвижной части 6 дна бункера. Его работа регулируется системой управления в зависимости от длительности интервалов между сигналами, поступающими.от счетчиков вьщаваемых в приемник 15 заготовок. Олтимизация работы достигается за счет того, что высота сечения потока заготовок в зоне сопряжения захватно-ориентйрующего органа с неподвижной частью 10 дна бункера поддерживается близкой к его радиусу. Это достигается за счет т-ого, что в момент, подъема части 6 дна бункера поток заготовок, поступающих из тары 4, отсекается. Часть заготовок, находящихся в захватно-ориентирующем органе 8 на границе сопряжения с бункером 5, сваливается при этом на свободньй участок 10 дна, а оставшиеся за счет освободившегося пространства свободнр пересыпаются по винтовому рельефу и соскальзывают в винтовые пазы 11. Таким образом, толщина слоя заготовок 14 в зоне их извлечения из начала поддерживается в пределах заданной величины, близкой к радиусу. Ориентация заготовок 14 начинается в зоне их извлечения из навала, где заготовки, свободно перемещаясь по винтовому рельефу, располагаются 31 в наиболее устойчивьгх положениях, которые непрерывно уточняются рельефом винтовой поверхности. Окончательная ориентация заготовок 14 обеспечивается в зоне их одно слойного расположения в винтовых пазах за счет сваливания в исходное положение тех, которые по каким-либо причинам не заняли предпочтительное положение. Проскальзьгоание ориентированных заготовок 14 по рельефу винтовых пазов 11 сопровождается колебаниями, 54 обусловленными изменяющимися величиной трений и величиной радиусов в различных точках контакта. Это способствует их ориентации и стабильному перемещению в приемник 15, Если стабильность вьщачи заготовок 14 в приемник 15 нарушается, выдается сигнал об отсутствии заготовок в таре 4, и платформа 1 позора- чивается в исходное положение для замены опорожненной тары наполненной, после чего цикл повторяется в описанной последовательности.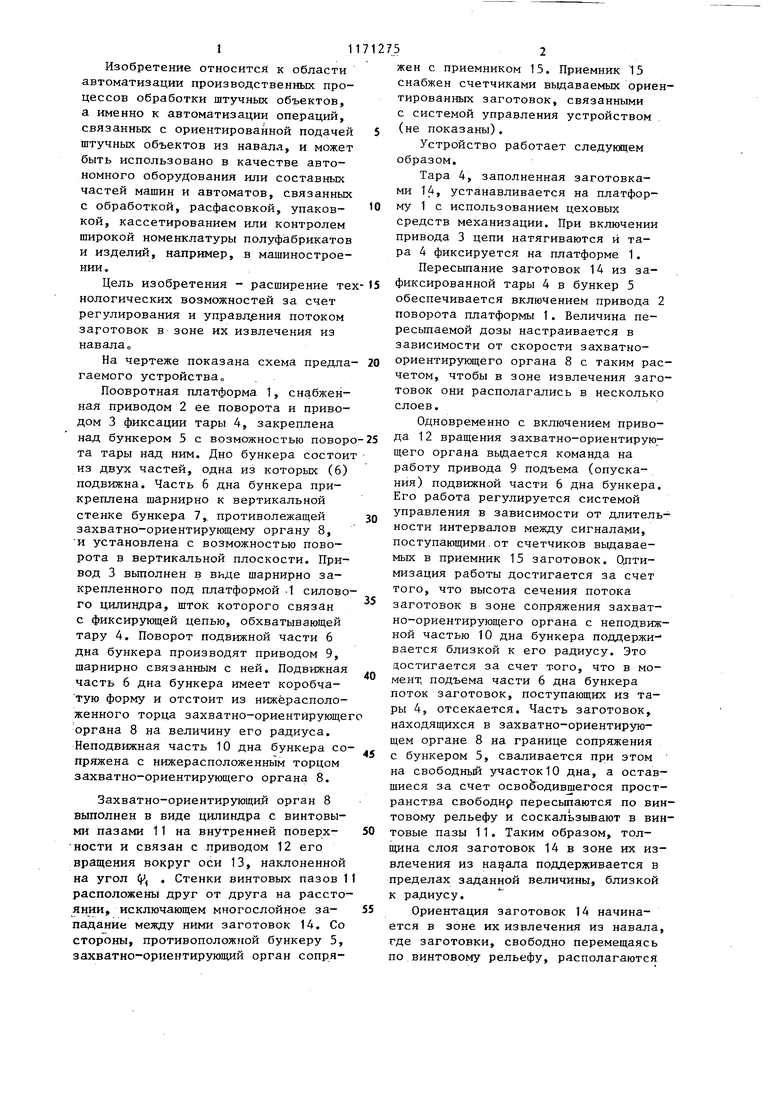
| название | год | авторы | номер документа |
|---|---|---|---|
| Барабанное автоматическое бункерно-загрузочное устройство | 1982 |
|
SU1080952A2 |
| Способ отделения из навала штучных заготовок и подачи ее в рабочую зону | 1983 |
|
SU1136872A1 |
| Устройство для поштучной выдачи заготовок из бункера и их ориентации | 1985 |
|
SU1348037A1 |
| Роторная машина | 1988 |
|
SU1537474A1 |
| Захватный орган для заготовок | 1986 |
|
SU1355333A1 |
| Захватный орган устройства для подачи заготовок в рабочую зону | 1978 |
|
SU740359A1 |
| Устройство для подачи деталей | 1984 |
|
SU1204305A1 |
| Устройство для поштучной выдачи плоских заготовок из бункера | 1983 |
|
SU1088850A1 |
| Бункерное загрузочное устройство | 1979 |
|
SU878494A2 |
| Устройство для захвата и выдачи плоских заготовок | 1983 |
|
SU1222364A1 |
БАРАБАННОЕАВТОМАТИЧЕСКОЕ БУНКЕРНО-ЗАГРУЗОЧНОЕ УСТРОЙСТВО, содержащее захватно-ориентирующий орган, выполненный в виде полого цилиндра с винтовыми пазами, установленный с возможностью вращения вокруг своей оси и сопряженньи нижним торцом с наклонным дном бункера, который установлен так, что одна из вертикальных стенок противолежит захватно-ориентирующему органу, о тличающееся тем, что, с целью расширения технологических возможностей, дно бункера выполнено из двух частей, одна из которых шарнирно прикреплена к вертикальной стенке бункера, противолежащей захватноориентирующему органу, и установлена с возможностью поворота в вертикальной плоскости, причем упомянутая часть дна бункера отстоит от нижнего (S торца захватно-ориентирукнцего органа (Л на: расстоянии, равном его радиусу.
| Барабанное автоматическое бункернозагрузочное устройство | 1975 |
|
SU536036A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
