Изобретение относится к обработке металлов давлением, в частности к средствам автоматизации штамповочного производства, и может быть использовано для подготовки к захвату плоских заготовок с последующей подачей ориентированных штучных заготовок в рабочую зону штампа.
Цель изобретения - повышение надежности его в работе путем повышения надежности подготовки крупных заготовок к захвату путем снабжения бункера вакуум- ными захватными органами и снабжения каждого вакуумного захватного органа постоянным магнитом.
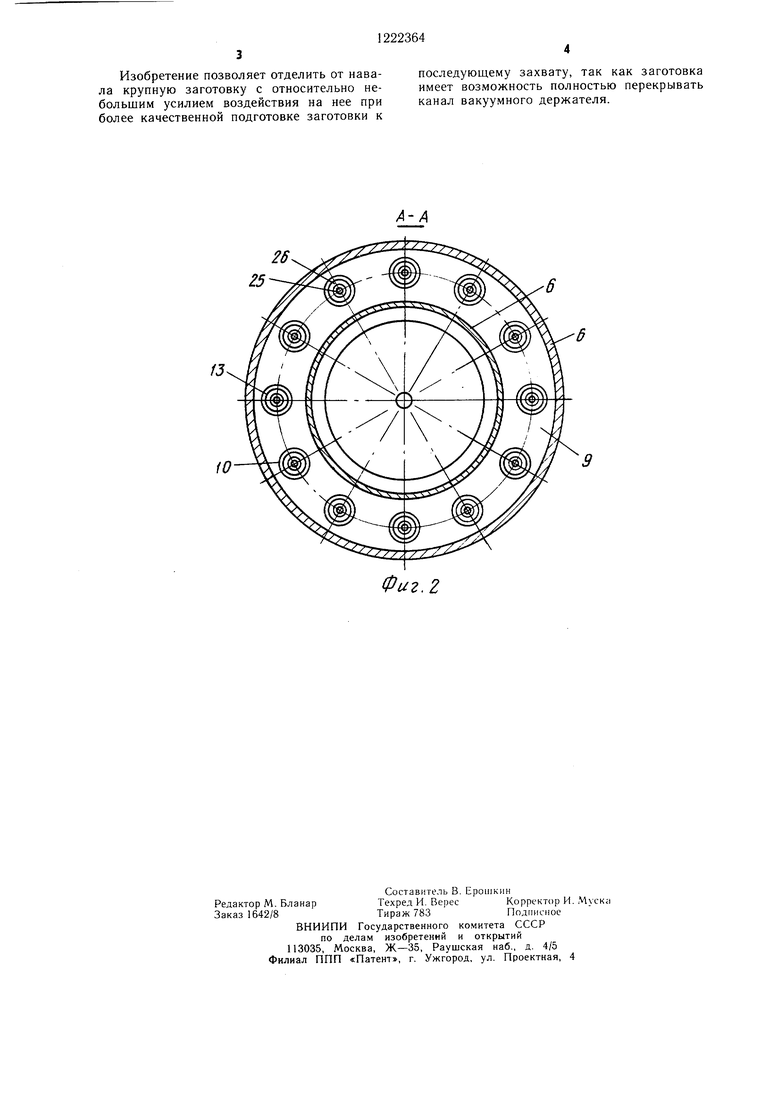
На фиг. 1 изображено устройство для захвата и выдачи плоских заготовок, разрез; на фиг. 2 - разрез А-А на фиг. 1.
Устройство для захвата и выдачи плоских заготовок содержит основание 1, на котором шарнирно смонтирован вал 2, на последнем установлено храповое колесо 3, при- водяшееся во вращение в одну сторону с помощью приводной собачки 4 и стопорной собачки (не показана), на валу зкреплена загрузочная емкость 5, рабочая часть которой выполнена в форме кольца 6 и имеет в верхней части конусные поверхности 7 и 8.
В плоском дне 9 загрузочной емкости выполнены сквозные отверстия 10, равномерно расположенные по окружности. Количество сквозных отверстий равно количеству зубьев храпового колеса 3.
На нагрузочной емкости закреплены обоймы 11, в которых расположены подвижные в вертикальном направлении стержни 12, соосные со сквозными отверстиями. Рабочие торцы 13 стержней расположены в плоское- ти дна загрузочной емкости, а их торцы 14 через закрепленную на стержнях пяту 15 поджаты пружиной 16 в направлении штоков 17 силового цилиндра 18. Пневматический цилиндр разделен поршнем 19, закрепленным на штоке, на камеры 20 и 21, со- общенные канала.ми 22 и 23 (поочередно, с сетью сжатого воздуха).
В каждом стержне выполнен соосный канал 24, сообщенный с атмосферой со стороны рабочего торца и связанный каналом 25 с источником разреженного воздуха. На рабочем торце каждого стержня закреплен кольцевой магнит 26, торец которого расположен в плоскости дна загрузочной е.мкости.
Изображены также траектория 27 движения стержня, заготовка 28, поднятая на отрезок с от дна загрузочной емкости, вакуумный держатель 29 и канал 30 вакуумного захватного органа.
Устройство для захвата и выдачи плоских заготовок работает следующим образом.
Бункер (фиг. 1 и 2) изображен в мо- мент работы, когда все стержни 12 расположены в крайних нижних положениях. Торец 14 стержня, расположенного соосно што
5
o 5
0
5
0
5
0
ку 17, поджат через пяту 15 пружиной 16 к торцу штока. Сжатый воздух через канал 22 подается золотниковым устройством (не показано) в камеру 20 силового цилиндра 18, а камера 21 тем же золотниковым устройством сообщена с атмосферой. Поршень 19 расположен в крайнем нижнем положении.
В результате подачи через канал 23 в камеру 21 сжатого воздуха поршень 19 через шток 17 двигает пяту 15 и стержень 12 вверх. В начале движения от рабочего торца 13 стержня 12 через каналы 24 и 25 источником разреженного воздуха начинается откачивание воздуха. Двигаясь вверх, на длине отрезка рабочий торец 13 стержня 12 расположен в среде взаимно пере.мещаемых им расположенных навалом заготовок. Так как от торца 13 стержня 12 откачивается воздух, заготовка, перекрывая по торцу 13 канал 24, удерживается на нем вакуумными силами и к концу хода стержня (отрезок а) отделяется от навала заготовок, расположенных в кольцеобразной полости 6 емкости 5. Для исключения при этом выпадания прочих заготовок из емкости 5 ее верхняя часть снабжена конусными поверхностями 7 и 8. Отделенная от навала заготовка 28 благоприятно расположена для последующего захвата вакуумным держателем 29, так как она имеет возможность полностью перекрывать его канал 30.
Далее вакуумный держатель 29 входит в контакт с заготовкой 28 из его канала 30 откачивается воздух, а из канала 24 откачка воздуха прекращается. Далее вакуумный держатель отделяет заготовку от торца 13 стержня 12 и транспортирует последнюю сначала в зону ориентации (не показана), а затем на рабочую позицию (не показана). Для магнитоактивных заготовок эффект удержания заготовок на рабочем торце 3 стержня 12 усиливается благодаря наличию магнита 26. Однако для последующего отделения от торца 13 вакуумным захватным органом 29 заготовки 28 требуется соответствующее увеличение вакуу.мных сил держателя 29.
Затем в канал 22 и камеру 20 подается сжатый воздух, канал 23 и камера 21 сообщаются с атмосферой, поршень 19 и шток 17 перемещаются вниз, что вызывает перемещение вниз под действием пружины 16 стержня 12.
Далее емкость 5, поворачиваясь от храпового колеса 3 через шток 2 ведущей собачки, подводит к штоку 17 очередное сквозное гнездо 10 с соответствующим стержнем 12 и рассмотренный процесс отделения от навала очередной заготовки 23 повторяется. При этом стержень 12 может отделять от навала две и даже три заготовки, если они занимают устойчивое положение относительно торца 13.
Изобретение позволяет отделить от навала крупную заготовку с относительно небольшим усилием воздействия на нее при более качественной подготовке заготовки к
последующему захвату, так как заготовка имеет возможность полностью перекрывать канал вакуумного держателя.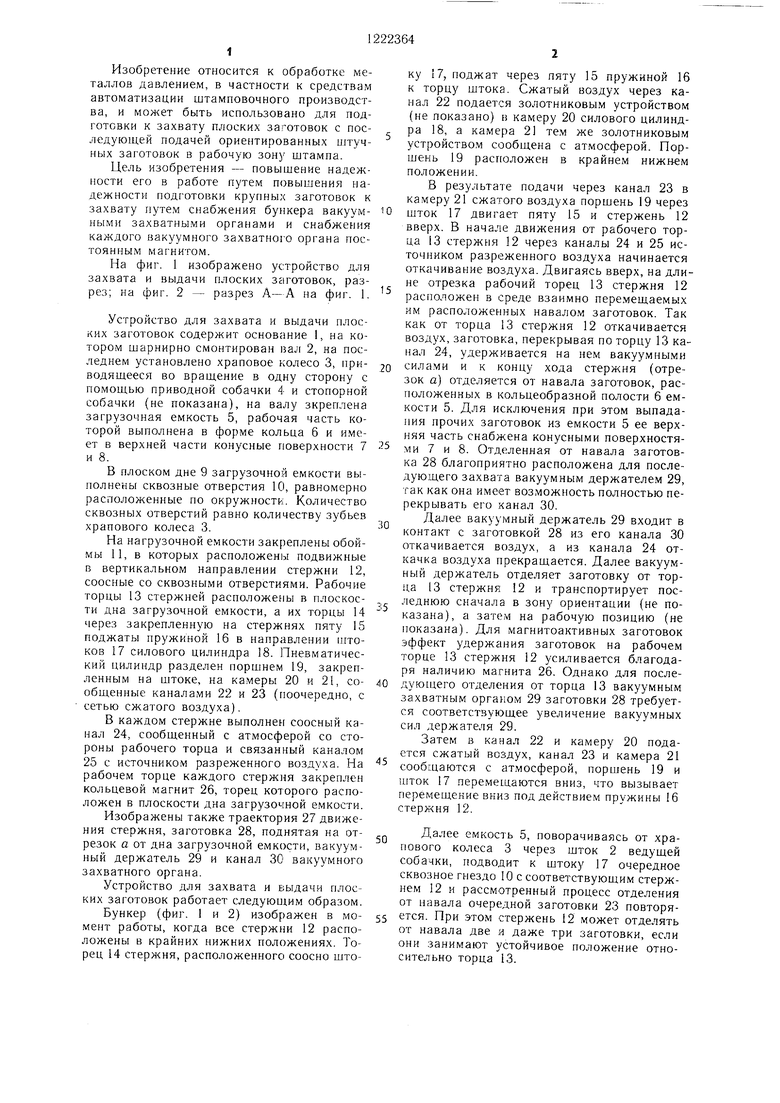
| название | год | авторы | номер документа |
|---|---|---|---|
| Загрузочный вибробункер | 1984 |
|
SU1243869A1 |
| Захватный орган для тонколистовых заготовок | 1985 |
|
SU1346308A1 |
| Устройство для подачи заготовок | 1981 |
|
SU988424A1 |
| Захватный орган для плоских заготовок | 1984 |
|
SU1222365A1 |
| Захватный орган для заготовок | 1986 |
|
SU1355333A1 |
| Захватный орган для плоских заготовок | 1982 |
|
SU1058688A1 |
| Устройство для захвата и поштучной выдачи плоских тонколистовых заготовок | 1982 |
|
SU1103927A1 |
| Вакуумный захватный орган | 1980 |
|
SU904846A1 |
| Устройство для подачи деталей | 1984 |
|
SU1204305A1 |
| Устройство для подачи плоских заготовок | 1990 |
|
SU1808446A1 |

26
25
W
Фиг. 2
| Устройство для захвата и поштучной выдачи плоских тонколистовых заготовок | 1982 |
|
SU1103927A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
