1 Изобретение относится к управлению электромагнитными компрессорами . На фиг. 1 представлена блок-схе предлагаемого устройства; на фиг. 2 схема блока дифференцирования. , Устройство для управления электромагнитным компрессором 1 содерiKHT последовательно соединенные датчик 2 положения якоря компрессора, блок 3 дифференцирования, блок 4 сравнения, блок 5 усиления мощности и функциональньш преобразователь 6, содержащий первый блок 7 умножения, первьй квадратор 8. последовательно соединенные второй квадратор 9, второй блок 10 умноже 1ия, первый сумматор 11, реле 12 третий блок 13 умножения и второй сумматор 14, а также задатчик 15. Устройство работает следующим образом. Сигнал xCi:} датчика 2 положения якоря электромагнитного компрессор 1 поступает на блок 3 дифференцирования, а также на первьй квадратор 8 и первьй блок 7 умножения функционального преобразователя 6. В качестве блока дифференцирова ния используется дифференцирующий фильтр (фиг. 2), реализующий функц p,,is + где (U ,, Ш 2 малые параметры; U u.li - оценки, соответственW J } но , X , X ) X . с выхода блока дифференцировани сигнал, пропорциональньй ij поступает на второй квадратор 9 и трети блок 13 умножения функционального преобразователя 6, а сигнал, пропорциональньй U - на блок 4 срав нения . На выходах первого и второг квадраторов формируются сигналы, пропорциональные х и ij , котор поступают соответственно на вход первого сумматора 11 и вход второг блока 10 умножения. На другой вход второго блока умножения подается 3 постоянньй сигнал со от задатчика 15, а на выходе второго блока умножения формируется сигнал, пропорциональный СО ( , поступающий на второй вход первого сумматора 11, на третий вход последнего поступает постоянный сигнал А от задатчика 15, а на выходе первого сумматора формируется сигнал i , пропорциональный Х + СО Ч-А. С выхода первого сумматора сигнал поступает на реле 12, формирующее/сигнал поступающий на третий блок 13 умножения. Одновременно надругой вход третьего блока умножения поступает сигнал с выхода блока 3 дифференцирования. На выходе третьего блока умножения формируется сигнал, пропорциональный U 51 п поступающий на вход .второго сумматора 14, на другой вход которого поступает с выхода первого блока 7 умножения сигнал, пропорциональный со X , где ы постоянный сигнал, поступающий от задатчика 15 на второй вход первого блока 7 умножения. На выходе второго сумматора 14 формируется сигнал, пропорциональньй sign поступакащй на блок 4 сравнения. На другой вход блока сравнения поступает сигнал с выхода блока дифференцирования, пропорциональньй ij. На выходе блока сравнения формируется сигнал управления 5 , пропорциональный уЧ 4 оСу 5, 5 которьй через блок 5 усиления мощности подается на обмотки электромагнитного компрессора. Таким образом, реализуется алгоритм управлеn kCyvux -oopignSOj5, x4CO- li -A, где k - константа. Реализуемьй алгоритм управления обеспечивает повышение точности регулирования за счет учета динамики электромагнитного компрессора, что обеспечивает повьшение КПД и рабочей частоты компрессора. 200к-0.0Jy 1,,ГУ .
в ff,ff7y
Фиг. 2 to -У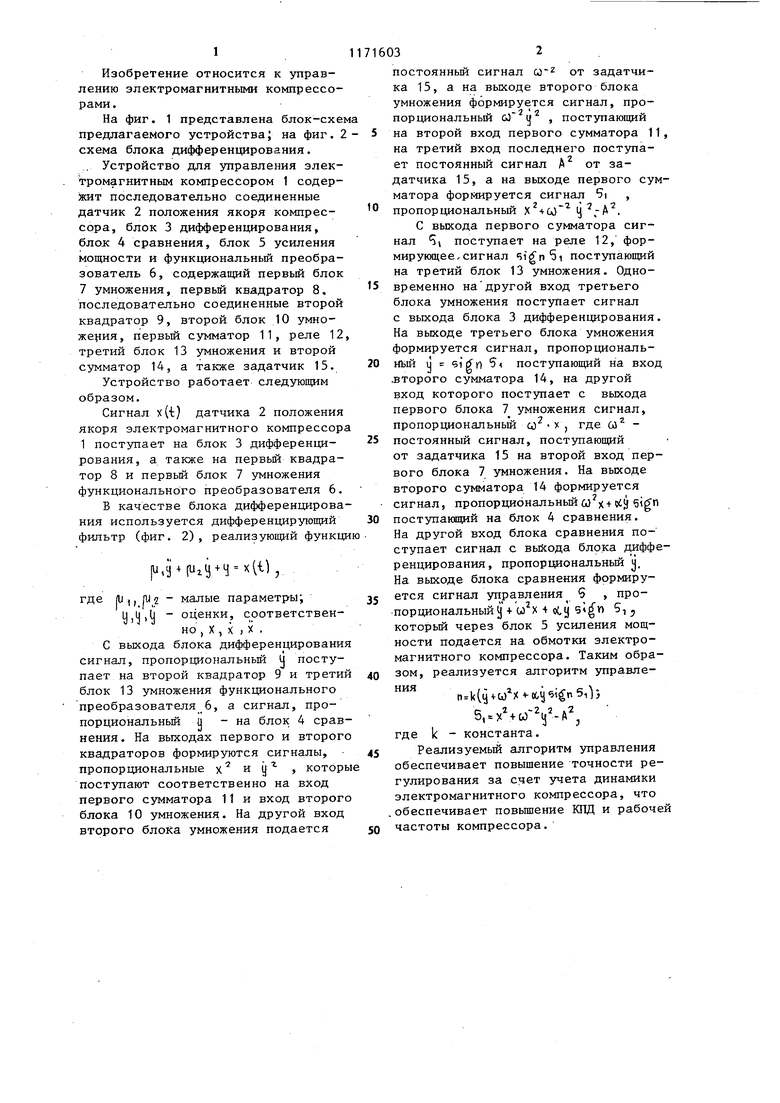
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления двухобмоточным двигателем возвратно-поступательного движения | 1981 |
|
SU1103339A1 |
| Система управления электромагнитнымКОМпРЕССОРОМ | 1979 |
|
SU827842A1 |
| Электропривод возвратно-поступательного движения | 1983 |
|
SU1136295A1 |
| Устройство для управления приводом робота | 1988 |
|
SU1618642A1 |
| Устройство для управления электроприводом робота | 1989 |
|
SU1664548A1 |
| Электропривод постоянного тока | 1985 |
|
SU1332501A1 |
| Электропривод | 1985 |
|
SU1332427A1 |
| Регулятор мощности тяговых электродвигателей подвижного состава | 1980 |
|
SU965822A1 |
| Способ защиты от помпажа компрессора и устройство для его осуществления | 1988 |
|
SU1643800A1 |
| Электрогидравлический следящий привод | 1986 |
|
SU1346858A1 |
1. УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ЭЛЕКТРОМАГНИТНЫМ КОМПРЕССОРОМ, содержащее ЛЬследовательно соединенные датчик положения якоря компрессора, блок дифференцирования, блок сравнения и блок усиления мощности, подключенный к обмоткам компрессора, отличающееся тем, что, с целью повышения точности регулирования, оно дополнительно содержит функциональный преобразователь, подключенный входами соответственно к датчику положения якоря и к блоку дифференцирования, а вьгходом - к второму входу блока сравнения. 2. Устройство по п. 1, отличающееся тем, что функциональньш преобразователь содержит первый блок умножения, первый квадратор, последовательно соединенные второй квадратор, второй блок умножения, первьш сумматор, реле, третий блок умножения и второй сумматор, а также задатчик, подключенный к первому и второму блокам умножения и к первому сумматору, причем вькоды первого квадратора I и первого блока умножения подключены соответственно к первому и вто(Л рому сумматорам, а входы - к датчику положения якоря, входы второго квадратора и третьего блока умножения подключены к блоку дифференцирования, а выход второго сумматора подключен к второму входу блока сравнения. а о 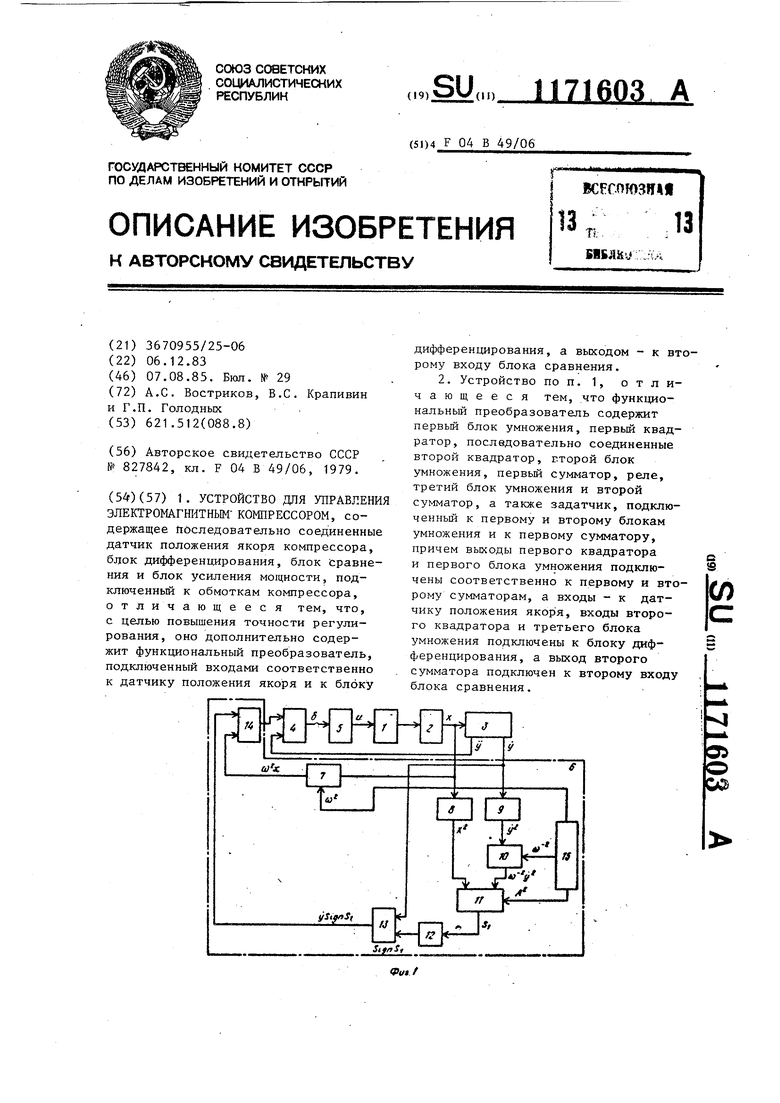
| Система управления электромагнитнымКОМпРЕССОРОМ | 1979 |
|
SU827842A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
