i
Изобретение относится к станкостроению, а именно к транспортным средствам автоматических линий метачлорежущих станков, и может использоваться для передачи деталей с одновременным подъемом.
Целью изобретения является повышение надежности работы транспортера-перекладчика путем сокращения вибрации штанги и-заклинивания ее при возвратно-поступательном перемещении в горизонтальной плоскости.
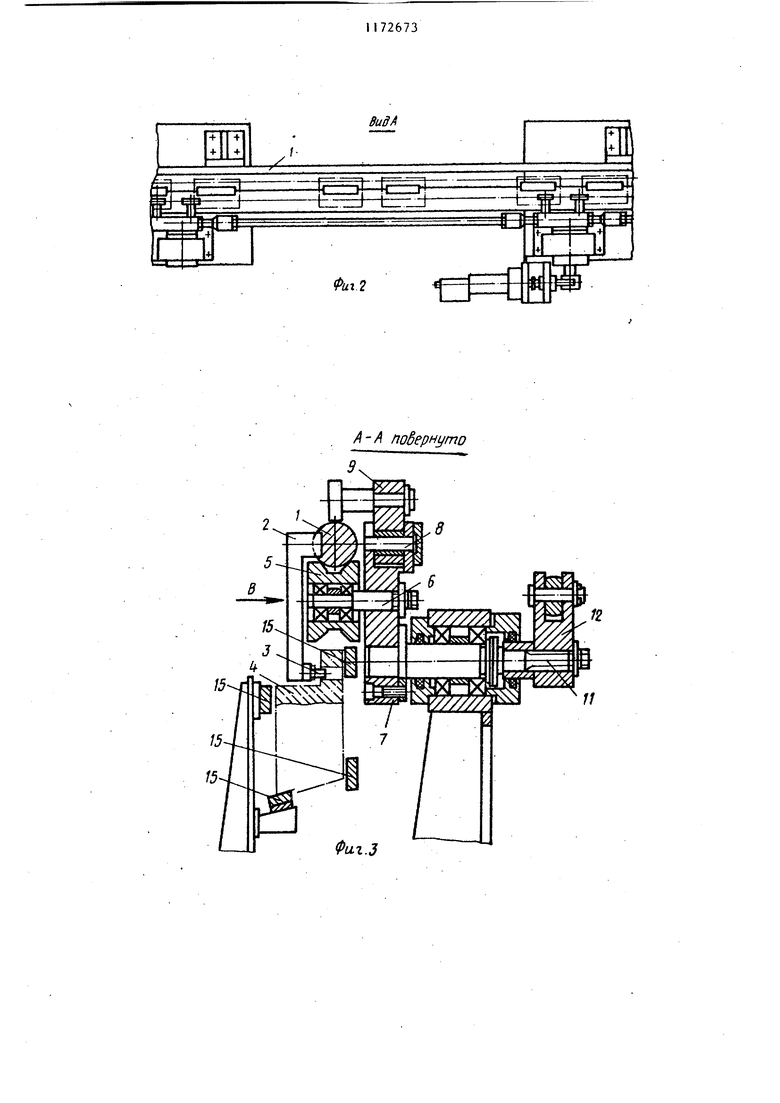
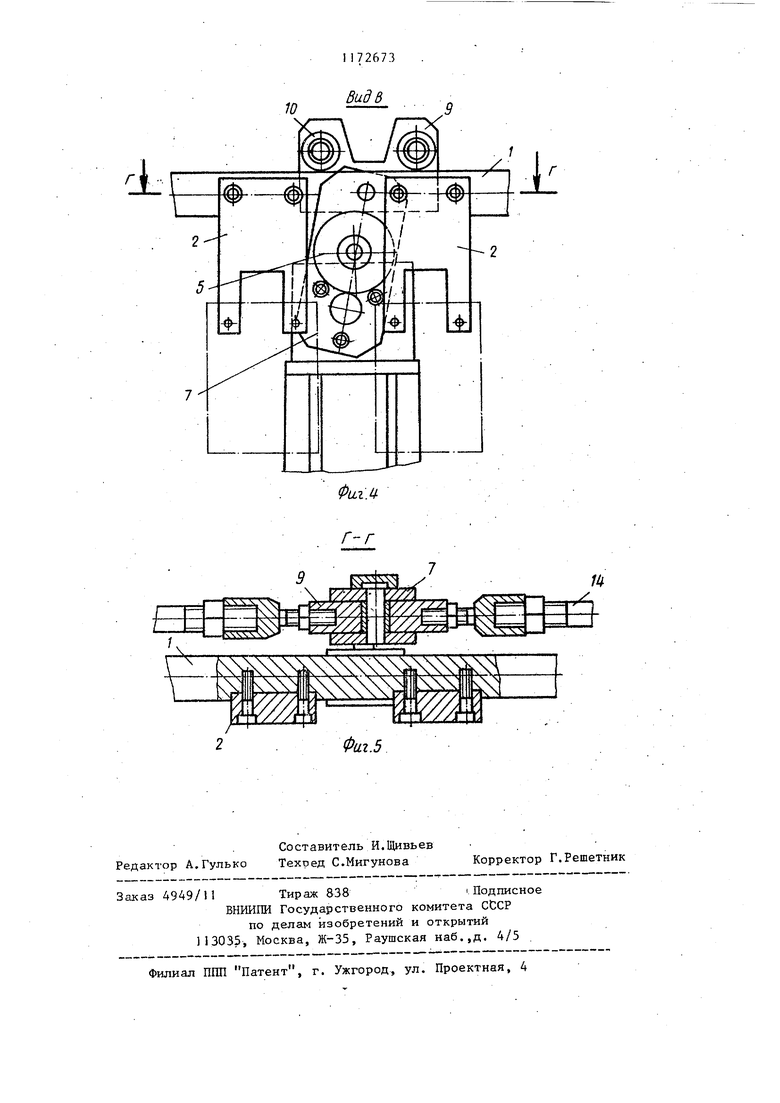
На фиг. 1 представлен транспортеперекладчик, вид спереди; на фиг.2вид А на фиг. 1; на. фиг. 3 - сечение А-А на фиг. 1; на фиг. 4 вид В на фиг. 3; на фиг, 5 - сечение Г-Г на фиг. А.
Транспортер-перекладчик содержит штангу 1 с жесткими собачками 2, которые снабжены цилиндрическими штырями 3 для базирования детали 4 при транспортировании.
Штанга 1 размещена на опорных роликах 5, оси 6 которых смонтированы на поворотных рычагах 7.
На рычаге 7 также монтируется ось 8 прижимного механизма штанги 1, выполненного в виде коромысла 9, на каждом из плеч которого размещены ролики 10, постоянно контактирующие со штангой 1.
На оси поворота 11 рычага 7 . устанавливается вилка 12, соединенная с приводом подъема и опускания штанги 1, выполненным в виде цилиндра 13.
На транспортере-перекладчике, на тяге 14, проходящей через весь транспортер-перекладчик, монтируются два коромысла 9.
Деталь 4 на промежуточных позицях транспортера .перекладчика базируется на направляющих планках 15.
Работа транспортера-перекладчик осуществляется по следующему циклу
2673 ,2
подъем детали - перемещение на шаг транспортера - опускание детали - поворот штанги с собачками от детали возврат штанги в исходное положе5 ние - поворот штанги на деталь.
При поступлении пары деталей 4 на транспортер-перекладчик штанга 1 с собачками 2 от приводаповорота (не показан) осуществляет поворот
0 в положение На деталь, при этом цилиндрические штыри 3 собачек 2 входят в базовые отверстия деталей 4. После этого цилиндр 13 осуществляет подъем штанги I посредством
5 вилки 12, которая, воздействуя на ось 11, поворачивает рычаг 7 против часовой стрелки, который занимает вертикальное положение, а штанга 1 поднимается на максимальную высоту.
Перемещение деталей 4 на шаг транспортирования осуществляется от привода главного движения автоматической линии (не показан).
5 При возвратно-поступательном перемещении штанги 1 действует прижимной механизм, который благодаря размещению коромысла 9 с роликами 10 на поворотном рычаге 7 осущестQ вляет постоянный контакт штанги 1 с опорным призматическим роликом 5 и устраняет ее вибрации.
При этом между штангой 1 и роликами 10 сохраняется постоянный зазор, равный 0,5 мм.
Опускание детали 4 на направляющие планки 15 рабочей позиции станка осуществляется тем же образом, что - и подъем детали,только в обратном порядке,
Далее от привода поворота штанга 1 с собачками 2 поворачивается в положение От детали и возвращается .- в исходное положение На деталь. Далее цикл повторяется.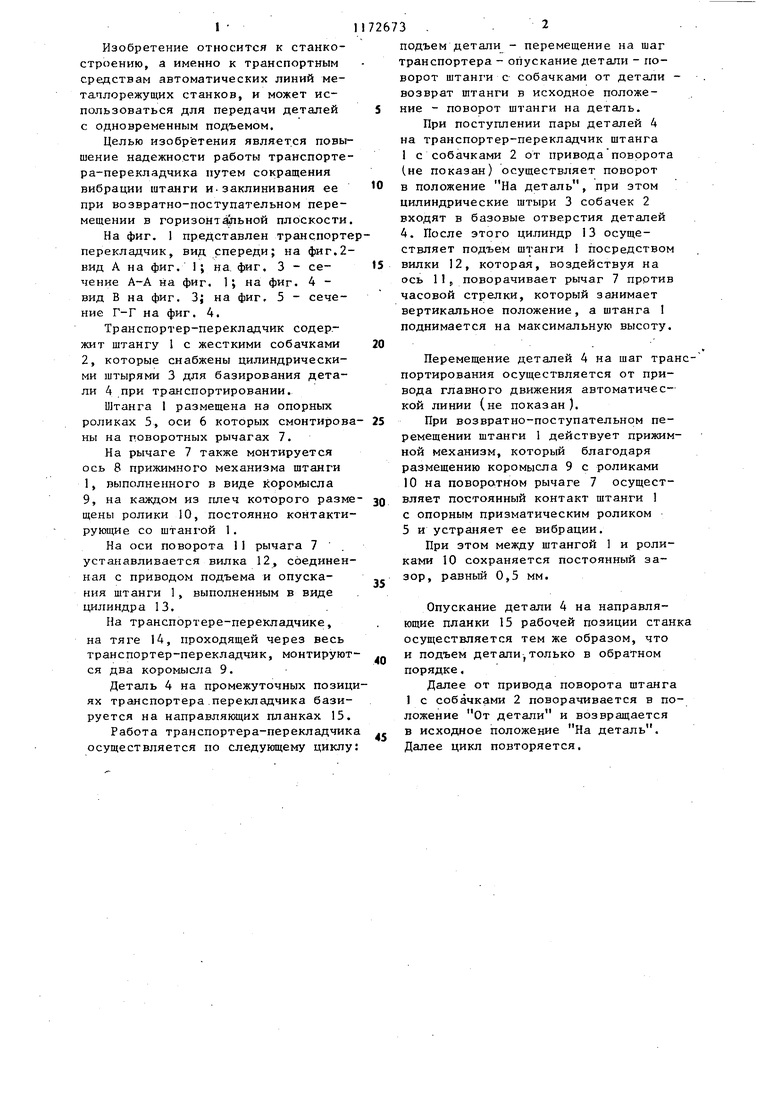
| название | год | авторы | номер документа |
|---|---|---|---|
| Транспортер-перекладчик | 1980 |
|
SU891343A1 |
| Устройство для кантования обрабатываемых деталей на конвейере | 1987 |
|
SU1537623A1 |
| ШАГОВОЕ ТРАНСПОРТНОЕ УСТРОЙСТВО ГРЕЙФЕРНОГО ТИПА | 1997 |
|
RU2118246C1 |
| Устройство для передачи деталей с одновременным их кантованием | 1974 |
|
SU512026A1 |
| Станок для изготовления пустотелых шлакобетонных камней | 1949 |
|
SU89315A1 |
| Станок для теплой сборки и разборки деталей | 1975 |
|
SU556023A1 |
| Автоматическая линия | 1975 |
|
SU554999A1 |
| УНИВЕРСАЛЬНЫЙ НАПОЛЬНЫЙ БЫТОВОЙ ДЕРЕВООБРАБАТЫВАЮЩИЙ СТАНОК | 1992 |
|
RU2030989C1 |
| Автоматическая линия | 1985 |
|
SU1348144A1 |
| Автоматическая линия | 1987 |
|
SU1445920A1 |
ТРАНСПОРТЕР-1ШРЕКПАДЧИК, содержащий штангу с жесткими собачками смонтированную на призматических опорных роликах с возможностью поворота, прижимной механизм штанги и механизм подъема ее, отличающий ciH тем, что, с целью повышения надежности работы транспортера-перекладчика, прижимной механизм выполнен в виде коро взICлa с роликами на каждом плече, установленного на механизме подъема штанги с возможностью взаимодействия с ней.
А-А подернуто
ФигЛ
Виде
| Машина для добывания торфа и т.п. | 1922 |
|
SU22A1 |
