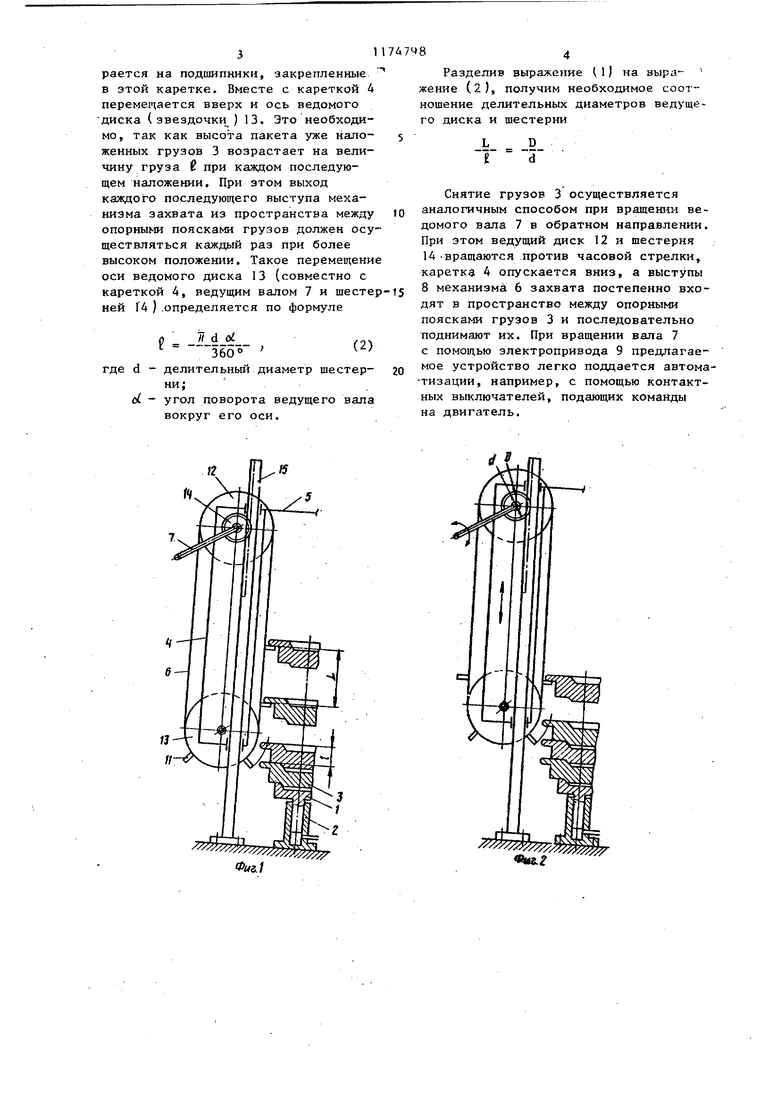
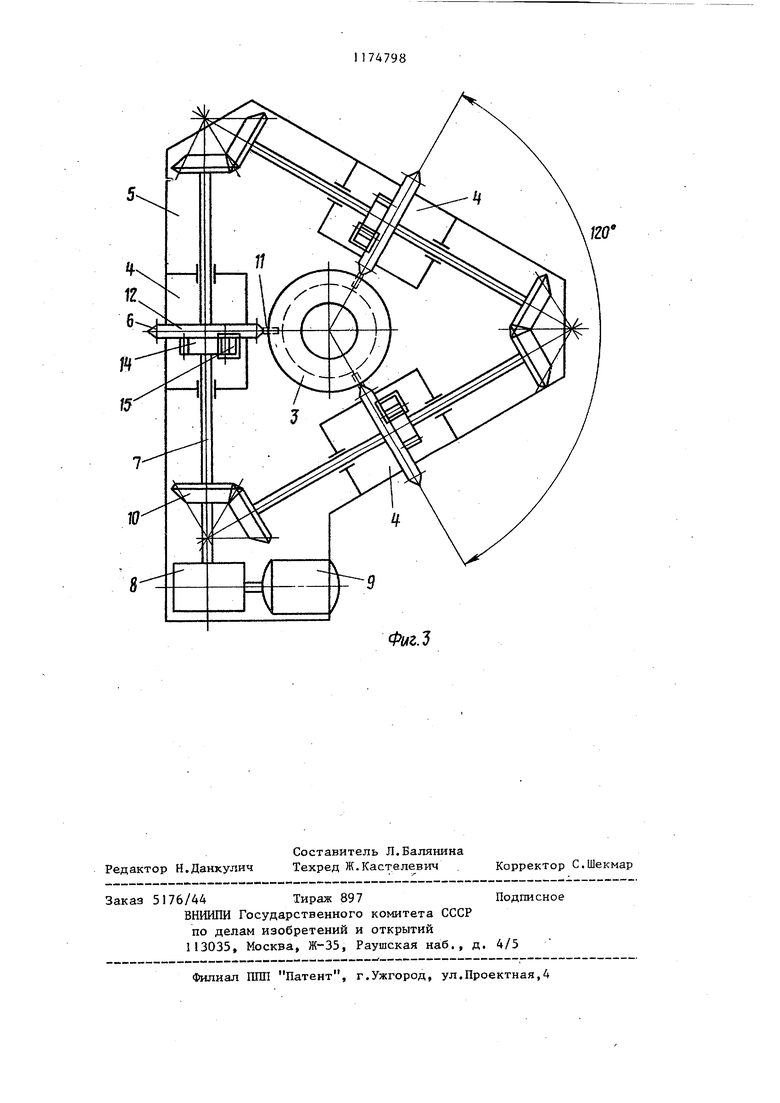
1 Изобретение относится к контроль но-измерительной технике и может быть использовано, например, в грузопоршневьпс манометрах. Цель изобретения - упрощение конструкции. На фиг.1 показана принципиальная схема устройства; на фиг.2 - то же, в положении после наложения оче редного груза; на фиг.З - устройство, вид сверху. Устройство состоит из грузоприем ной обоймы 1, связанной с вращающимся поршнем манометра 2. На верхней поверхности грузоприемной обоймы выполнена выемка, предназначенная для фиксированного размещения груза 3. Выемка может иметь коничес кую форму или цилиндрическую с заходной фаской. Грузы 3 имеют подобн выемки и ступеньки для фиксации при наложении друг на друга и на грузоприемную обойму 1, а также опорные пояски (уступы ) для зацепления при подъеме грузов. В подвижном корпусе установлено три подвижные каретки 4 расположенные по окружности под углом 120 и жестко соединенные между собой платформой 5. На каждой карет ке 4 размещен механизм 6 захвата грузов, соединенный посредством вал 7через редуктор 8 с приводом 9, установленным на платформе 5. Для обеспечения синхронного движения тр механизмов 6 захвата грузов, размещенных под углом 120° на подвижных каретках 4, валы 7 каждой каретки 4 связаны между собой парой кони ческих шестерен 10. Редуктор 8 и пр вод 9 закреплены под платформой 5. 8качестве привода 9 применен ревер сивный электродвигатель. Механизм 6 захвата грузов выполнен в виде цепного замкнутого транспортера с расп ложенными на равном расстоянии выступами 11 для захвата грузов 3, Тя говый орган цепи механизма 6 захвата натянут между приводной звездочкой 12 и ведомой 13, которые имеют возможность вращения в подшипниках каретки 4. На валу 7 приводной звез дочки 12 закреплена ходовая шестерня 14, находящаяся в контакте с вер тикальной кодовой штангой 15, выдол ненной в виде неподвижной зубчатой рейки, установленной на общем основании с манометром 2. При этом выступы 11 механизма 6 захвата име8ют возможность входа в пространство между опорными поясками грузов 3 для захвата грузов при их подъеме, а делительный диаметр (D) приводной звездочки 12 так относится к делительному диаметру (d) ходовой шестерни 14, как расстояние (L) шага расстановки выступов 11 тягового органа транспортера к шагу (Р) расположения уступов.грузов 3. Устройство работает следующим образом. При наложении грузов привод 9 через редуктор 8 вращает ведуп ий вал 7 по часовой стрелке, причем вращение передается на все ведущие валы, так как они связаны между собой парой конических шестерен 10. Закрепленный на каяодон валу 7 ведущий диск (звездочка ) 12 также вращается по часовой стрелке., перемещая механизм 6 захвата (цепь ) совместно с выступами 11 по замкнутому контуру. При этом выступы 11, поддерживающие часть грузов, опускаются вниз относительно каретки 4. Благодаря гибкости механизма 6 захвата (цепи) на нижнем криволинейном участке его контура, очередной выступ 11 поворачивается вокруг оси ведомой звездочки 13 и выходит из пространства между опорными поясками грузов 3, налагая очередной груз на пакет ранее наложенных грузов 3. При перемещении механизма 6 захвата (цепи) по замкнутому контуру на величину расстояния между выступами каждый из выступов I1 занимает относительно каретки 4 положение, соответствующее положению предшествующего выступа до начала перемещения, т.е. устройство подготовлено к наложению следующего груза. Перемещение определяется по формуле aL 360 где D - делительный диаметр ведущего диска (звездочки ); оС - угол поворота ведущего вала вокруг его оси. Вместе с тем, закрепленная на ведущем валу 7 шестерня 14 поворачивается по часовой стрелке на тот же угол и, перекатываясь по-неподвижной зубчатой рейке 15, перемещается вверх. Каретка 4 также перемещается вверх потому, что вал 7 опирается на подшипники, закрепленные в этой каретке. Вместе с кареткой 4 перемещается вверх и ось ведомого диска (звездочки ) 13. Это необходимо, так как высота пакета уже наложенных грузов 3 возрастает на величину груза 6 при каждом последующем наложении. При этом выход каждого последующего выступа механизма захвата из пространства между опорными поясками грузов должен осу ществляться каждый раз при более высоком положении. Такое перемещени оси ведомого диска 13 (совместно с кареткой 4, ведущим валом 7 и шесте ней 14 ) .определяется по формуле 360° где d - делительный диаметр шестерни;d - угол поворота ведущего вала вокруг его оси. 84 Разделив выражение (1) на выра- жение (2), получим необходимое соотношение делительных диаметров ведущего диска и шестерни Снятие грузов 3 осуществляется аналогичным способом при вращеш и ведомого вала 7 в обратном направлении. При этом ведущий диск 12 и шестерня 14 -вращаются против часовой стрелки, каретка 4 опускается вниз, а выступы 8 механизма 6 захвата постепенно входят в пространство между опорными поясками грузов 3 и последовательно поднимают их. При вращении вала 7 с помощью электропривода 9 предлагаемое устройство легко поддается автоматизации, например, с помощью контактных выключателей, подающих команды на двигатель.
IS
J2
14
«й/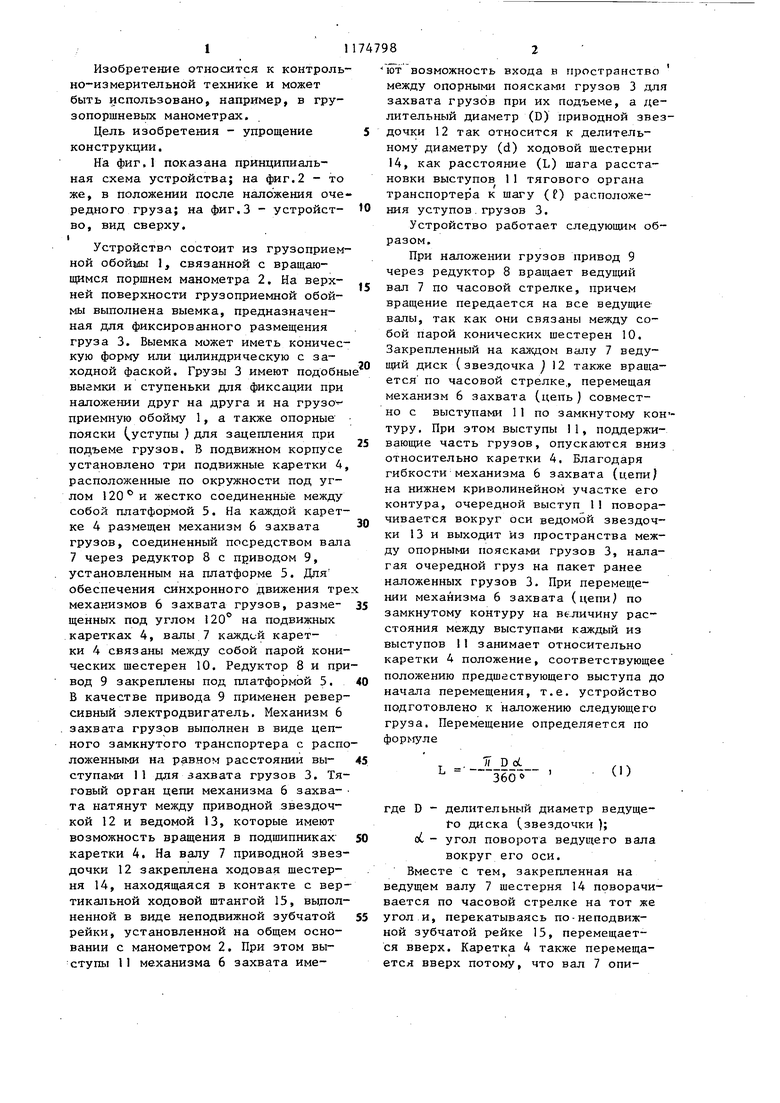
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматизирован-НОй уСТАНОВКи гРузОВ | 1978 |
|
SU794407A1 |
| Устройство для установки труб в трубные решетки теплообменников | 1983 |
|
SU1186452A1 |
| Устройство для укладки цилиндрических изделий в контейнер | 1981 |
|
SU1027119A1 |
| Штаблер для обслуживания полочных стелажей | 1976 |
|
SU591379A1 |
| Ленточный конвейер | 1989 |
|
SU1759755A1 |
| Механизированный стеллаж | 1982 |
|
SU1022875A1 |
| ТРЕНАЖЕР КОСМОНАВТА | 2012 |
|
RU2490182C1 |
| Вертикально-замкнутый тележечный конвейер | 1981 |
|
SU982992A1 |
| Вариатор Н.П.Ефимова | 1981 |
|
SU1199674A1 |
| Устройство для отбора мощности от колес транспортного средства | 1989 |
|
SU1678658A1 |
УСТРОЙСТВО ДЛЯ АВТОМАТИЗИРОВАННОЙ УСТАНОВКИ И СНЯТИЯ ГРУЗОВ, содержащее пакет вертикально наложенных грузов с уступами для зацепления, расположенн-ых на грузоприемной обойме грузопоршневого манометра, подвижную каретку с редуктором и механизмом захвата грузов. расположенную на вертикальной ходовой штанге, установленной на основании, привод, кинематически связанный с механизмом захвата и редуктором, отличающееся тем, что, с целью упрощения конструкции, каретка снабжена ходовой шестерней, жестко связанной с валом привода а зацеплением - с ходовой штангой, механизм захвата выполнен в виде цепного замкнутого транспортера с выступами для захвата грузов, рассредоточенными на его тяговом органе, расположенном в вертикальной плоскости, приводная .звездочка трансS портера установлена на одном валу с (f. ходовой шестерней, причем отношение диаметров приводной звездочки С. и ходовой шестерни равно отношению шага расстановки выступов тягового органа транспортера к шагу расположения уступов грузов.
| Устройство для установки и снятия грузов к грузопоршневым манометрам | 1977 |
|
SU672523A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для автоматизирован-НОй уСТАНОВКи гРузОВ | 1978 |
|
SU794407A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
