И «)брсте || е относится к области контр1),11)М()-ич К 11 гельиой техники, а именно к ()M;iTH3npo данным грузопорпгневым манометрам, и может найти применение при построении аитоматизирова 1ных грузопорп |еиы приборов контро.1я и регулирования даи/Кпия с/катогч; воз.туха, применяемых в метрологии, авианриборостроении и т. н.
11з кчТ1П)1 устройства для установки и снятии гру.чов, С(5держа1пие грузодержатель. жестко связанный с поргппем мапометра, комплект грузов-колец, грузоподъемную o6oii iy с то.чкателем, схему управления и программный меха1П13м, выполненный в виде нрофилированного диска, киргематически связанного с приводом врап1ения поршпн 1| и 12.
Виду сложности конструкции устройства, обусловленной необходимостью установки врап1аюп1ихся грузов на вращающийся грузодержатель поршня, прямого контакта грузов с толкате.лями, опираюпл. другим своим концо.м на профилированный программный диск,большой силы трепия в месте контакта,и необходимости применения силового электромагнита значительной мощное гн, а также сложности привода поворота прог-раммных дисков и длительного времени установки (или снятия) грузов, указанное устройство малоэффективно и металлоемко.
Наибо,лее близким является устройство для установки и снятия грузов к грузопорп невым манометрам, содержащее грузодержате.чь, жестко связанный с мапометра, комплект грузов-колец, грузопрпемную обойму с тoлкaтeля пl, схему управления, программный механизм, выполненный в виде жестко установленного на стакане грузоприемной обоймы барабана, на наружной стороне верхнего основания которого размещены кольца с упорами, расположенными под толкателями, при этом кольца кинематически связаны с якорями электро.магнитов схемы управления, раеположенными на внутренней стороне нижнего основания барабана, а стакан грузоприемной обоймы связан с эксцентриком, уста1Ювле1П1ым на валу дополнительного электродвигателя 3.
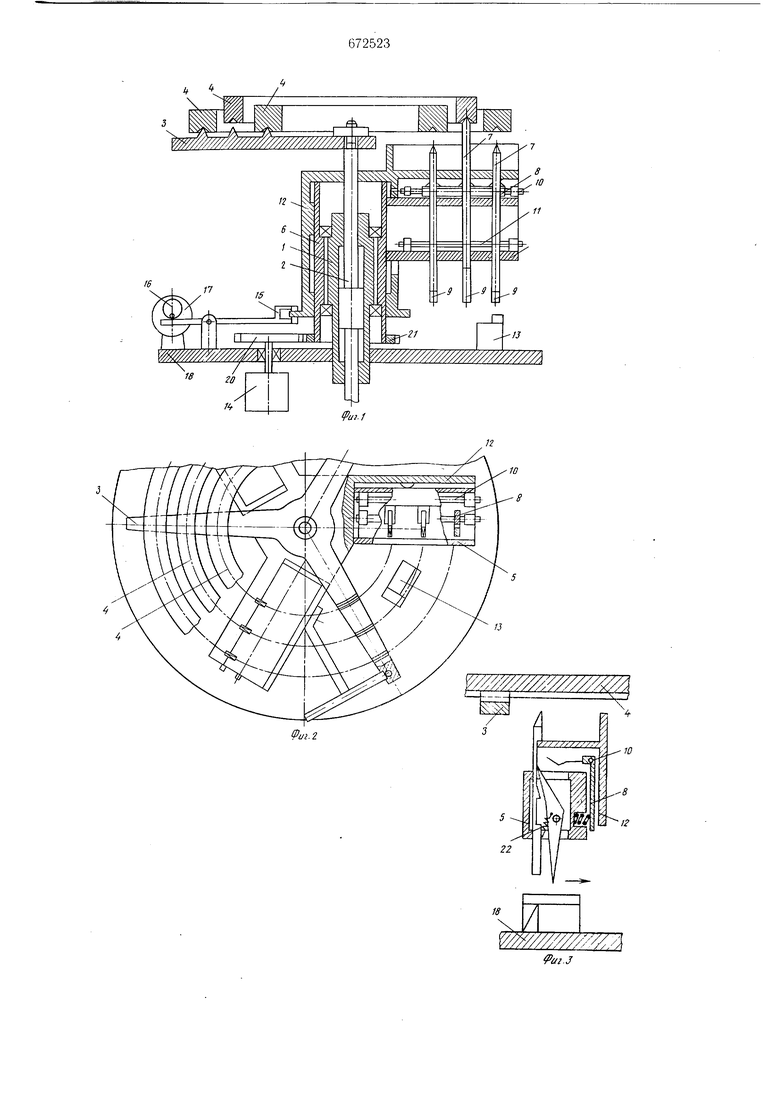
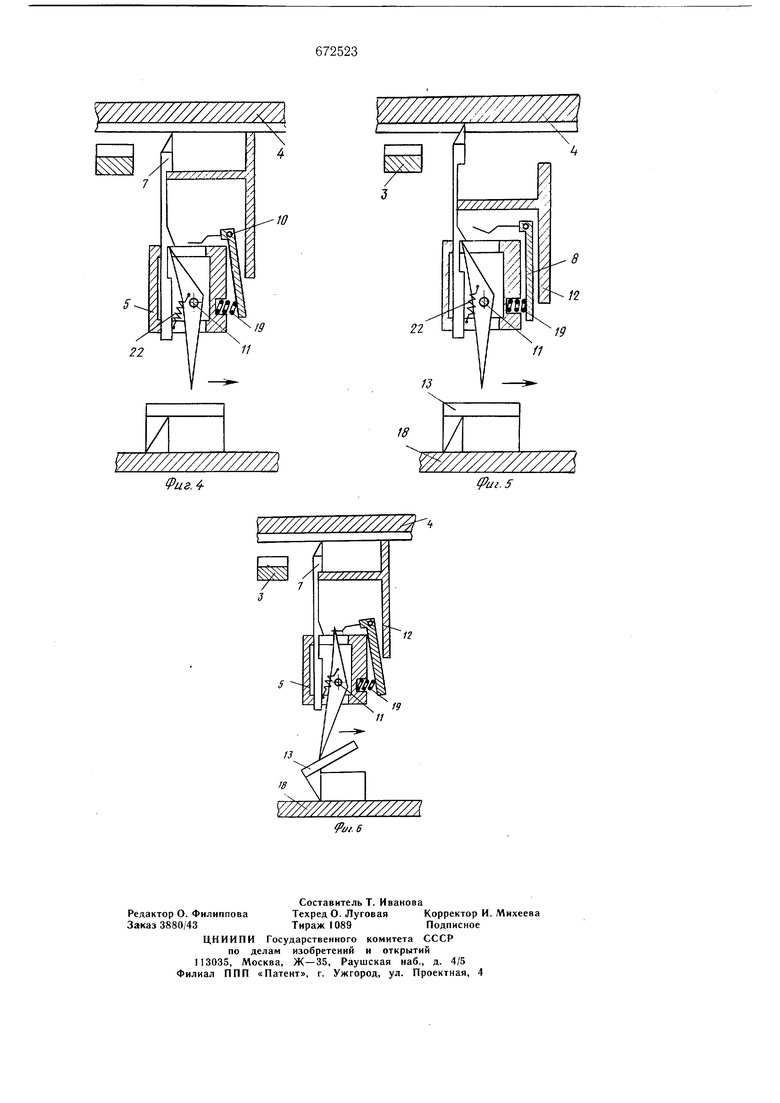
Недостатком устройства является размещение электромагнитов программного мехаПИ.M.i n;i rijiiMJbiioincMCH барабане, что треб ч :ip;.имчния вращающегося коитактно14) , p ;iicTB:i, ус.1ОЖ1 яю1цего конструкцию и сни.Каюшего надежн()ст1 работы устройсчиа. Кроме того, якоря ,лектро 1агнитов кингматически связаны с ко/пенами нрограммного механизма. Это требует значнтельП(М1 потреб,1яемо11 мониюстп, так как д;1я ,1 гр ui -J. 1ектро 1агннт должен нреодолет1 сид тр(мп(я в месте контакта кольца с основанием барабана п д(),1же11 1аходиться под напряжением до тех и(;р, пока грузеприемная обойма с толкателями займет нижнее положение, т, е, весв IUIK;I установки и снятия грузов. He.ibK) изобретения является повьппение падежпости устройства, снижение нотреб,1яеMoii 1он1Ности -л1ектрома1нитов нрограммноIX) механизма, умегилиепие габаритов и веса устройства д,1я установки и снятия грузов. Эта пс,1ь достигаеТ1Я тем, что в устройСТ1Я) д.гя усчановки и сиятия грузов к грузопорп1псвым манометрам, содержащее грузодержател,, жестко связанный с норн1нем манометра, ком11,1ект грузов-колен, грузонриемную обойму с то.1кателями, нрогрммный механизм с э.лектромагнитами и схему уирав,1сния, введена грузоподъемная обсжма, нри этом якоря электромагнитов )азме1цены на неподвижном основании и кинематически связаны с установленными П1арнирно на грузонриемной обойме рычажными уиорами, снабже1Н1ыми защелкой и контактируюпцгчи с толкателями, на стержне KOToppiix 15ыио,лнеиы устуи1;1, а грузонодьемная обо(1ма кинематнчески евязана с толкателями я за нелкой рычажного yiiopa. Г1ред,тагаемая схема устройства нозво,тяет разместит. э,1сктромагнит1 1 программного мехаиизма на неподвижном основаиии, тем самым иск,1ючит1 из схем1 1 управления вран1ак)П1,ееся контактное устройство, упростив конструкцию, повысить надежиость работы. Кроме того, э,1ектромагнит1)1 нрс)граммного механизма в нроцессе работ1 1 имеют контакт с )азгруже1ни, рычажным упором, что пе требует от пих знач11те;1ьн1)Г усилий, тем самвгм снижается иотребляемая ими мощность, а с;1едовательио, их laбариты и вес. На фи1 1 изображена нринпиииа,пд1ая схема устройства; на фиг. 2 то же, вид сверху; на фиг. 36 - кинематическая связь отдельиых элементов устройства на рабочих этанах никла. Устройство для установки и снятия грузов к грузоиоршневым манометрам, основой которого яв,1яются ци,1индр I и неуилотнеиный HOpuieHb 2 мапометра, состоит из грузодержателя 3, жестко связанного с iio|)Hiнем 2, грузов-колен 4, .гру:к)ириемной обоймы 5, жеетко соединенной со етакано.м 6. В грузонриемной обойме 5 находятся толкатели 7, упругие :1аи1е;1ки 8 и рычажные упоры 9, размеи1енные соответственно на верхней И) и 1п-1жней II осях. Устройство содержит также рузоподьемную обойму 12, распсхлагаемую на стакане 6, электромагниты нрог)аммпого механизма 13, электродвигател1) 14, узел грузопод1)емной обоймы в виде неравпоплечего рычага 15 и экспе1ггрика 16, установленного на валу э,1ектродвигателя 17 (. 1, 2). Грузодержатель 3 и грузоприе.мная обойма 5 выполнены в виде трехнлечих крестовии, смеп1ен1П)Гх одна относительно другой, причем в направляюп1пх отверстнях плеч )узоприемной обоймы 5 разметено по три то,1кате.1я на каждый груз на одинаковом радиусе, а на и.лечах грузодержателя 3 имеются концевые выступы, удерживаю1ние кольца-грузы 4 от радиа,11)Ных сдвигов, па тгх же радиусах, что и еоответств юи1ие им толкате, и. То,1кате,1И 7 имеют уступы под грузонодтзсмнук) обойму 12 и иод рычажные упоры 9. распо.1оженные на пижие осп 11 грузоприемной обойм|,| 5 под якоря.ми э.пектромагпитоЕ) 13 схемы уирав.кмшя. Электромагниты 13 размсмпены ие псмюдвижном основании 18. Упругие за1не. 8. )аспо,1оженные на оси К) обой.мы 5 под рычажн|)|м упором 9, прижаты упругим э.тементом 19 к 12. Поршень и связанные с ним .аетали враи;а1отся от э,11ктродвигате,1я 14 через зубчатую П1есте)ню 2Г| и етакан 6 с зубчатым Ko,:iecoM 21, новодко1 ое устройство и грузодержате,П) 3. Одновременно от этого же э,1ектрг)дви1ате.1я врап1ается грузо.чриемная ()б()Г|ма 12. li исходиом состоянии гручы 4 находятся на грузодержате.К 3, э.:сктромагниты 13 обесточены, т().-|кате.ли 7 верхними .ми .1ежат на грузоиодьемио; обойме 12 (фиг.З). Рычажные уи.1ры 9 и|)ижаты у |ругими элемеитами 22 к Ч),1кателям 7, верхнее гмечо уиругих занк-.юк 8 поднято, упругий элемент 19 сжат. Перед иачалом работы грузы спи маются с грузодержателя 3 слеяуюnui i образом. Э. ате.11 иод:)ема грузов 17 поворачивает aKCHeirrpiiK 16, при этом ,псвое п.Кчо рычага 15 о 1ускается. а правое подпимасгся, 11е)емеи1ая вверх грузоподъемную (.1б(я1му 12 с то,-1кателем 7. При подъеме вверх грузы-1 о.1Ы1а .южатся на стенку груИ)подье 1но|1 обг)Г1мы 12 и осв.|бождают грузодержате.И) 3. Угфу|ая защелка 8 иод действпем упругого э,1еме1гга 19 поворачивается вокруг оси И), оиуская верхнее плечо. В моменг, когда об(.) 12 1аходится в крайнем но,1ожении, р 11чажные уиоры 9 под дейст1 ием упругих э.1ементов 22 входят в усту1и,1 To.iKaTc,ieii 7 (())иг. 4). j дальи1е, эксцентрик 16 11о1 0рачиваяс через |)ычаг 15 опускает груз(Л1одьемную это.м унругая зан1е,лка 8 обойму 12. При вокруг оси 10. поднимая поворачивается
верхнее плечо, упругий элемент 19 сжимается, толкатели 7 нижними выступами опираются на упоры 9, а грузы 4 ложатся на толкатели 7.
В крайнем нижнем положении грузоподъемной обоймы с электродвигателя 17 снимается напряжение. Таким образом, грузы 4 сняты с грузодержателя 3 и помещены на толкатели 7 обоймы 5, т. е. механизм установки грузов подготовлен к работе (фиг. 5).
При задании (измерении) давления грузы на грузодержатель поршня устанавливаются следующим образом.
По команде с пульта управления подается питание на электродвигатель 17, который, вращая эксцентрик 16, поднимает грузоподъемную обойму 12. В верхнем положении обойма снимает грузы-кольца 4 с толкателей 7, а верхнее плечо упругих защелок 8 опускается. В мо.мент, когда обойма 12 находится в верхнем положении, со схемы управления подается напряжение на соответствующие электромагниты, при этом их якоря поднимаются (фиг. 6). Рычажные упоры 9, вращаясь вместе с обоймой 5 и задевая за поднятый якорь своего электромагнита, выходят из выступа толкателя 7 и захватываются упругой заихелкой 8. После этого напряжение с электромагнита снимается, и его якорь возвращается в исходное положение.
При ходе грузоподъемной обоймы 12 вниз (фиг. 3) толкатели, рычажные упоры 9 которых удерживаются защелками 8, спускаются в нижнее положение, а соответствующие им грузы-кольца 4 переходят на грузодержатель 3 порщня 2. Остальные грузыкольца вновь приходят на толкатели 7 грузоприемной обоймы 5.
Переход к друго.му значению задаваемого давления происходит аналогично, т. е. электрические импульсы подаются на соответствующие управляющие электромагниты в момент, когда обойма 12 поднята вверх.
Предлагаемая схема устройства для установки и снятия грузов к грузопорщневым манометрам применяется в производственных условиях для автоматизации контрольноизмерительных процессов. Повыщение надежности работы за счет упрощения конструкции устройства снижает рас.ходы на изготовление и эксплуатацию прибора в целом, создает автоматизированный, надежно работающий, грузопорщневой прибор, исключающий оператора из процесса контроля и
улучшающий условия труда за счет полной замены ртутных манометров.
Формула изобретения
Устройство для установки и снятия грузов к грузопорщневым манометрам, содержащее грузодержатель, жестко связанный с порщнем манометра, комплект грузов-колец, гру.зоприемную обой.му с толкате,1ями,
программный механизм с электромагнитами и схему управления, отличающееся тем, что, с целью повышения надежности устройства, в него введены грузоподъемная обойма, при этом якоря электромагнитов размещены на неподвижном основании и кинематически связаны с установленными гнарнирно на грузоприемной обойме рычажными упорами, снабженными защелкой и контактирующими с толкателями, на стержне которых выполнены уступы, а грузоподъемная обойма кинематически связана с толкателями и защелкой рычажного упора.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР
19873, кл. G 01 L 7/16, 1967.
2.Авторское свидетельство СССР АО 266295, К.П. G 01 L 7/16, 1970.
3.Авторское свидетельство СССР :Мо 397787. к,л. G 01 L 7/16, 1973.
щ

| название | год | авторы | номер документа |
|---|---|---|---|
| Грузопоршневой манометр | 1985 |
|
SU1254323A1 |
| УСТРОЙСТВО для УСТАНОВКИ и снятия ГРУЗОВ к ГРУЗОПОРШНЕВЫМ МАНОЛ\ЕТРАМ | 1973 |
|
SU397787A1 |
| УСТРОЙСТВО для ДИНАМИЧЕСКИХ ИСПЫТАНИЙ ДАТЧИКОВ ДАВЛЕНИЯ | 1971 |
|
SU305378A1 |
| Механизм наложения грузов с программнымупРАВлЕНиЕМ для гРузОпОРшНЕВОгО MAHOMETPA | 1977 |
|
SU636948A1 |
| Устройство для установки и снятия грузов к грузопоршневым манометрам | 1977 |
|
SU711369A1 |
| Механизм наложения грузов для грузопоршневого манометра | 1983 |
|
SU1163167A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ВЕСА ЗАРЯДОВ | 1985 |
|
RU2047112C1 |
| УСТРОЙСТВО ДЛЯ ДИНАМИЧЕСКОЙ ТАРИРОВКИ ДАТЧИКОВ ДАВЛЕНИЯ | 1973 |
|
SU368507A1 |
| Тормозное устройство для конвейера | 1975 |
|
SU581044A1 |
| Крытый грузовой вагон | 1985 |
|
SU1250492A1 |
)
az.J
