Изобретение предназначено для исользования при взаимной ориентации еталей типа вал-втулка в процессе сборки узлов и агрегатов в машиностроении, приборостроении и других областях техники.
Целью изобретения является расширение технологических возможностей путем обеспечения любой заранее заанной траектории поиска и совмещения сопрягаемых деталей.
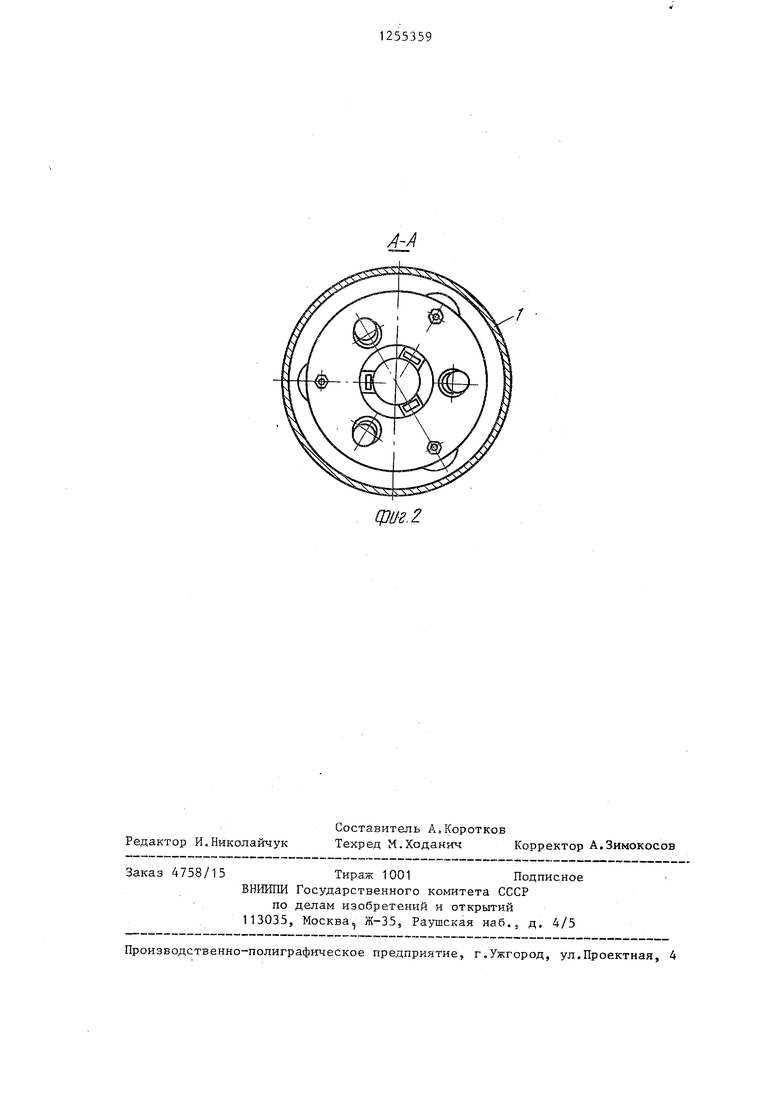
На фиг. 1 изображено предлагаемое устройство, разрез; на фиг. 2 - разрез А-А на фиг. 1.
Устройство содержит установленный в механической руке корпус 1, внутри которого расположены верти- , кальные стержни 2, несущие на себе зажимные шайбы 3, между которыми закреплены наклонные стержни 4., на концах которых закреплен захват 5 с кулачками 6. На свободных концах стержней 2 и 4 закреплены преобразователи 7,и 8 ультразвуковых колебаний, соединеные с регуляторами 9 фазы и амплитуды, которые поДсоеди- нены к распределительному устройству 10, соединенному с генератором 11. ультразвуковых колебаний.
Устройство для взаимной ориента ции деталей работает следующим образом,
Промышленньй робот позиционирует устройство вместе с захваченным устанавливаемым валиком над жестко закрепленной в сборочном приспособлении базовой втулкой и производит движение сопряжения, сближая эти детали. При совпадении осей симметрии собираемых деталей происходит их сборка. Если оси не совпадают, торец валика упирается в торец втулки, Промьшшенный робот прижимает обе детали к сборочному приспособлению с определенным усилием, чтобы осу- ществить жесткий контакт меясду кулачками 6, валиком,, втулкой и сборочным приспособлением, для передачи ультразвуковой энергии, Затем рас
пределительнре устройство 10 подключает поочередно преобразователи 8 ультразвуковых колебаний или в комбинации к генератору 11 ультразвуковых колебаний, при этом начинают вибрировать стержни 2. Частота колебаний стержней 2 значительно превосходит собственную частоту устройства, поэтому ультразвуковые колебания стержней 2 для данного устройства являются удлинениями, которые заставляют повернуться шайбы 3 вместе со стержнями 4, захватом 5, кулачками 6 и валиком, который смещается
относительно втулки.
При различных последовательностях возбуждения стержней 2 валик совершает поисковые движения. Траектория поисковых движений изменяется последовательностью возбуждения стержней 2 или их комбинаций, изменением фаз ; и амплитуд подаваемых ультразвуковых колебаний от генератора 11 ультразвуковых колебаний через регуляторы 9 фазы и амплитуды на преобразователи 8 ультразвуковых колебаний. Для расширения зоны поиска совместно со стержнями 2 в работу включаются и
стержни 4, В результате поисковых движений стержней 2 и 4 валик занимает позицию на кромке отверстия втулки или с некоторым несовпадением. Тогда валик в результате потери
устойчивости из-за угловой податливости устройства и под действием вибрации сползает с края отверстия, т.е. занимает соосное с отверстием втулки положение, из которого валик
сопрягается со втулкой под действием ранее приложенной силы при одновременном воздействии колебаний ультразвуковой частоты,
Конструкция устройства позволяет изменять положение наклонных стержней 4 и силу зажатия их шарниров для сборки валиков в некотором диапазоне масс,
Редактор И.Николайчук
Составитель А.Коротков
Техред М.Ходаннч Корректор А.Зимокосов
Заказ 4758/15Тираж 1001Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва,, Ж-35, Раушская наб.. д. 4/5
Производственно-полиграфическое предприятие, г,Ужгород, ул.Проектная, 4
фи-г.2
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для сборки | 1984 |
|
SU1177113A1 |
| Устройство для сборки деталей типа вал-втулка | 1984 |
|
SU1177112A1 |
| Устройство для сборки | 1985 |
|
SU1271701A1 |
| Сборочно-захватная головка манипулятора | 1984 |
|
SU1191281A1 |
| Устройство для взаимной ориентации собираемых деталей | 1985 |
|
SU1328136A1 |
| Устройство для сборки соединений | 1988 |
|
SU1689009A1 |
| ЯДИЩЭ-ГОНГ-^СЩкLf тБЛ I- i'G Тс.Н А | 1972 |
|
SU329995A1 |
| СПОСОБ СБОРКИ СОЕДИНЕНИЙ ТИПА "ВАЛ-ВТУЛКА" | 2008 |
|
RU2381095C1 |
| Способ манипулирования | 1981 |
|
SU984791A1 |
| Устройство для сборки деталей типа вал-втулка | 1985 |
|
SU1284767A1 |

| Indastrial Robot, 1980, V | |||
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |
| Прибор с двумя призмами | 1917 |
|
SU27A1 |
| Устройство для ориентации винтозавинчивающего инструмента | 1983 |
|
SU1229004A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
