ния компенсируемой погрешности позиционирования собираемых деталей.
На чертеже схематически изображено предлагаемое устройство.
Изобретение относится к машинострое- зователей 12 через распределительное уст- нию и приборостроению и может быть ис-ройство к генератору высокочастотных копользовано при сборке деталей типа вал- лебаний робот осуществляет движение со- втулка.пряжения. При совпадении осей симметрии
Цель изобретения - расширение техно- собираемых деталей происходит их сборка, логических возможностей за счет увеличе- Если же оси собираемых деталей не совпадают, устанавливаемая деталь 10 упрется в торцовую поверхность базовой втулки. Под действием ультразвуковых колебаний наклонные стержни 6 будут разворачиватьУстройство для взаимной ориентации 0 ся в шарнирах 5 и пазах 8, а плита 4 собираемых деталей содержит установлен- будет перемешаться, деформируя пружинки 3 ный в механической руке корпус 1, внутри до тех пор, пока ось детали 10 не сов- которого расположены вертикальные стерж- падает с осью отверстия в базовой втулке, ни 2, на концах которых размешены витые В процессе сопряжения детали 10 и базо- пружинки 3, жестко заделанные в плите 4. tr вой втулки ультразвуковые колебания исклю- В плите 4 на шарнирах 5 закреплены на- чают их заклинивание, клонные стержни 6, имеюш.ие каждый по концевому элементу 7, например, коническойФормула изобретения формы, входяш,ему в паз 8 захвата 9, удерживающего устанавливаемую деталь 10. На- Устройство для взаимной ориентации со- клонные стержни 6 служат распоркой между 20 бираемых деталей, содержаш.ее механичес- 11ЛИТОЙ 4 и захватом 9, соединенных стяж- кую руку с закрепленным на ней корпуными пружинами 11. Стержни 2 и 6 снабжены преобразователями 12 ультразвуковых колебаний, соединенными через распределительное устройство с генератором высокочастотных колебаний (не показаны).
25
сом, шарнирно установленные в корпусе вертикальные стержни, связанные с по- мош,ью соединительных элементов с плитой, и -шарнирно установленные на плите наклонные стержни, соединенные с захватом, причем все стержни снабжены преобразователями ультразвуковых колебаний, отличающееся тем, что, с целью расширения технологических возможностей, оно снабжено стясом, шарнирно установленные в корпусе вертикальные стержни, связанные с по- мош,ью соединительных элементов с плитой, и -шарнирно установленные на плите наклонные стержни, соединенные с захватом, причем все стержни снабжены преобразователями ультразвуковых колебаний, отличающееся тем, что, с целью расширения технологических возможностей, оно снабжено стяУстройство для взаимной ориентации собираемых деталей работает следующим образом.
Промышленный робот позиционирует уст- - гивающими пружинами, размещенными меж- ройство с захваченной устанавливаемой де- ду плитой и захватом, а на верхней поверх- талью 10 над жестко закрепленной в ности захвата выполнены пазы под концы сборочном приспособлении базовой втулкойнаклонных стержней, кроме того, соедини(не показана). После подключения преобра- тельные элементы выполнены упругими.
Редакторе. Пекарь Заказ 3434/17
ВНИИПИ Государствениого комитета СССР по делам изобретений и открытий
113035, Москва, Ж-35, Раушская наб., д. 4/5 Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
5
сом, шарнирно установленные в корпусе вертикальные стержни, связанные с по- мош,ью соединительных элементов с плитой, и -шарнирно установленные на плите наклонные стержни, соединенные с захватом, причем все стержни снабжены преобразователями ультразвуковых колебаний, отличающееся тем, что, с целью расширения технологических возможностей, оно снабжено стяСоставитель В. Гудков
Техред И. ВересКорректор Л. Бескид
Тираж 974Подписное
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для взаимной ориентации деталей типа вал-втулка | 1984 |
|
SU1255359A1 |
| Устройство для сборки деталей типа вал-втулка | 1985 |
|
SU1284767A1 |
| Устройство для сборки деталей типа вал-втулка | 1984 |
|
SU1177112A1 |
| Исполнительный орган манипулятора | 1987 |
|
SU1493460A1 |
| Устройство для сборки | 1984 |
|
SU1177113A1 |
| Устройство для автоматической сборки с автопоиском | 1980 |
|
SU942927A1 |
| Многопозиционное зажимное устройство | 1981 |
|
SU975305A1 |
| УСТРОЙСТВО ВЗАИМНОЙ ОРИЕНТАЦИИ ДЕТАЛЕЙ ПРИ СБОРКЕ | 2002 |
|
RU2215633C2 |
| Многопозиционное захватное устройство | 1981 |
|
SU994254A1 |
| Схват | 1985 |
|
SU1284828A1 |
Изобретение относится к области машиностроения и позволяет расширить технологические возможности устройства при осуш,ествлении сборки деталей тина вал- втулка с помошью промышленных роботов при значительной погрешности их позиционирования. После включения преобразователей 12 ультразвуковых колебаний, которыми оснащены стержни 2, 6, устанавливаемая деталь 10 подается на сборочную позицию и прижимается к базовой детали. При этом наклонные стержни 6 разворачиваются в шарнирах 5 и пазах 8, плита 4 смешается, деформируя пружину 3, в результате чего захват 9 с деталью Ю будет перемешаться относительно базовой детали до тех пор, пока оси базовой и устанавливаемой деталей на совпадут и не произойдет их сопряжение. 1 ил. 4 -сл со ьо 00 со О5 -/о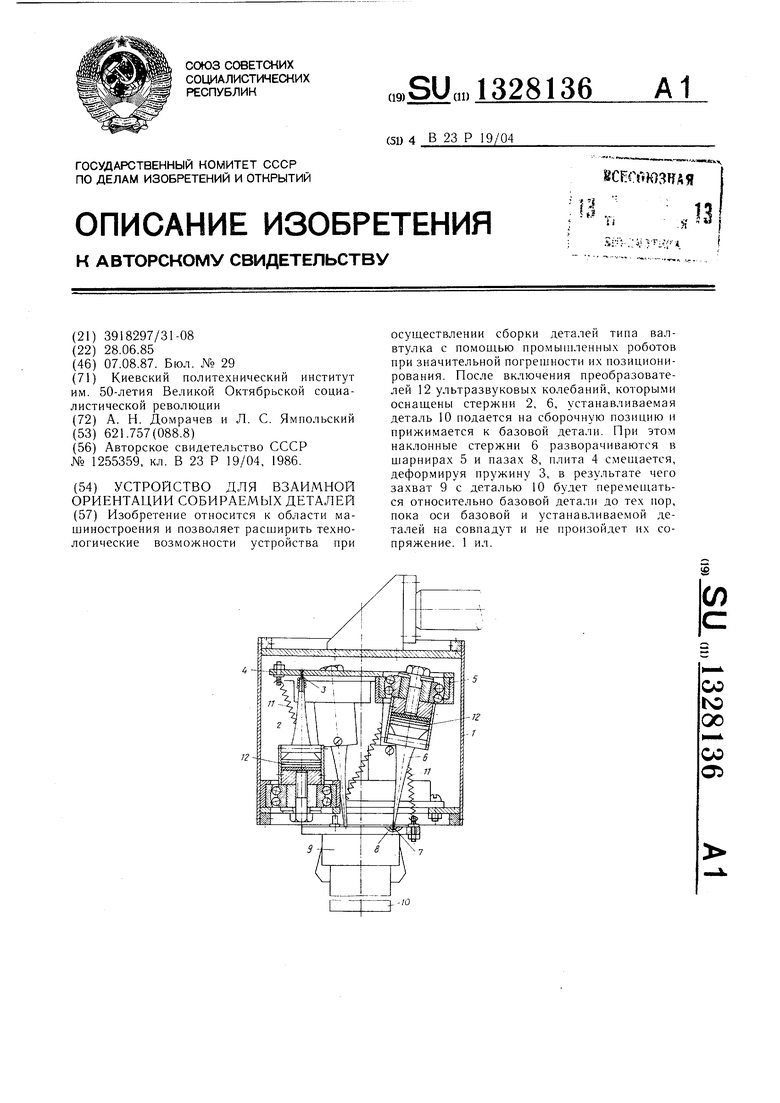
| Устройство для взаимной ориентации деталей типа вал-втулка | 1984 |
|
SU1255359A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
