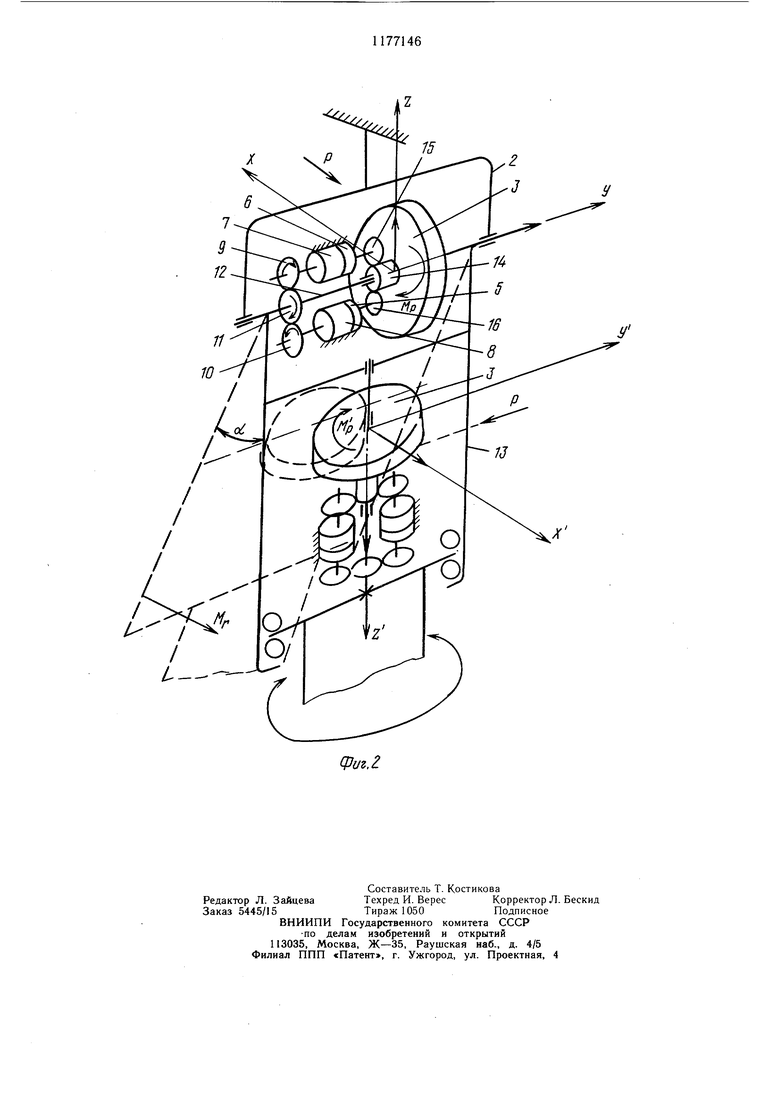
Изобретение относится к машиностроению и может быть использовано в дистанционных манипуляторах, работающих как в обычных, так и во вредных условиях, во взрывоопасных и пожароопасных помещениях различных классов и категорий. Цель изобретения - упрощение конструкци, снижение энергоемкости и повышение КПД, а также повышение точности позиционирования и улучшение динамических характеристик. На фиг. 1 изображена конструктивная схема манипулятора; на фиг. 2 - кинематическая схема с указанием действующих сил и моментов. Манипулятор содержит источник 1 избыточного давления воздуха Р, корпус 2 - первое от основания звено с подводом к нему источника 1, маховик 3 с лопастями 4, две электромагнитные муфты 5 и 6, ведомые части которых через редукторы 7 и 8 и колеса 9 11 кинематически связаны между собой. Колесо 11 в свою очередь размещено на оси 12 первого шарнира, образованного корпусом 2 второго звена 13. Маховик 3 расположен жестко на валу 14 с возможностью вращения относительно оси 12 шарнира, кроме того на валу 14 выполнен зубчатый венец, который кинематически через шестерни 15 и 16 связан с ведущими частями электромагнитных муфт 5 и 6. Кинематические связи муфт 5 и 6 между собой и осью 12 имеют передаточное отношение 1:1. Привод каждого последующего звена от основания к исполнительному звену 17 имеет массу, меньше массы привода предыдущего звена в 1,5 раза (оптимальный вариант). Манипулятор работает следующим образом. Энергия сжатого воздуха подается под давлением Р от источника 1 в корпус 2 с расчетом, что воздушная струя попадает на лопасти 4 маховика 3. Маховик 3 разгоняется до угловой скорости и до получения им запаса кинематической энергии. Одновременно с маховиком 3 вращается вал 14, который передает поочередно крутящий момент Мр через шестерни 15 или 16 в зависимости от требуемого направления движения звена 13 при срабатывании ведущих частей электромагнитных муфт 5 или 6. Они срабатывают от управляющих сигналов задающего устройства (не показано) и далее передают крутящий момент через редукторы 7 или 8, колесам 9 или 10, колесу 11, которое соединено с осью 12 первого щарнира - в данном случае, шарниру качания ( с координатами X, Y и Z). Ось 12 первого шарнира, жестко соединенная с корпусом следующего звена 13, вращаясь, вынуждает перемещаться все последующие звенья манипулятора, вплоть до исполнительного звена 17. Люфт, имеющийся между колесами 9-11, устраняется гироскопическим моментом Мг, возникающим при вращении маховика 3 последующего звена 13 (входящего одновременно в щарниры качания и вращения). При отклонении корпуса этого звена на угол а на этот корпус действует гироскопический момент Мг, направленный вдоль оси X, который создает натяг взаимодействующих щестерен 11 и 9, или 11 и 10. В свою очередь маховик 3 звена качания создает гироскопический момент Мг , действующий на корпус звена вдоль оси Y, что создает натяг шестерен (колес) 9-11 в шарнире вращения. Аналогично выбираются люфты и в остальных звеньях манипулятора. Демпфирование колебаний и компенсация ошибок позиционирования звеньев манипулятора, вызванных люфтами передач, позволяют улучшить точность и динамические характеристики манипуляторов в целом, что приводит к росту производительности и расширению функциональных возможностей манипулятора. Гидроскопическое воздействие открывает возможность снижения массы подвижных звеньев при неизменных точностных и динамических характеристиках, что позволяет достичь заданной точности при меньшей мощности привода и способствует уменьшению металлоемкости и улучшению энергетических показателей манипулятора. Наличие автоматической выборки люфта в предлагаемом манипуляторе, без включения дополнительных средств, резко снижает стоимость изготовления, повышает надежность и расширяет возможности применения манипулятора. Простота конструкции обеспечивает высокую надежность предлагаемого манипулятора.
(риг. г 
| название | год | авторы | номер документа |
|---|---|---|---|
| Податливый дифференциальный шарнир манипулятора с силомоментным очувствлением | 2021 |
|
RU2803718C2 |
| ПРИВОД ПОДВИЖНОГО ЗВЕНА | 1988 |
|
SU1690308A1 |
| Манипулятор А.И. полетучего | 1985 |
|
SU1247262A1 |
| Манипулятор | 1980 |
|
SU891425A1 |
| Манипулятор | 1983 |
|
SU1199610A1 |
| Шарнир манипулятора | 1984 |
|
SU1180260A1 |
| Манипулятор внутрикамерный | 2021 |
|
RU2785920C1 |
| Шарнир манипулятора | 1983 |
|
SU1140946A1 |
| Манипулятор | 1983 |
|
SU1094734A1 |
| Манипулятор | 1982 |
|
SU1085804A1 |
МАНИПУЛЯТОР, содержащий шарнирно связанные звенья и приводы их перемещения, отличающийся тем, что, с целью упрощения конструкции, снижения энергоемкости и повышения КПД, а также повышения точности позиционирования и улучшения динамических характеристик, звенья выполнены в виде корпуса из шарнирно связанных частей, зубчатого венца, расположенного на оси шарнира, и маховика с лопастями, установленного жестко на валу и кинематически связанного через зубчатый венец с двумя электромагнитными муфтами, причем ось указанного вала коаксиальна оси шарнира, оси по крайней мере двух соседних звеньев взаимно перпендикулярны, а приводы выполнены в виде источников избыточного давления, направленных на маховик. СЛ Од
| Копирующие манипуляторы | |||
| Справочник-каталог | |||
| Гребенчатая передача | 1916 |
|
SU1983A1 |
| Способ очищения сернокислого глинозема от железа | 1920 |
|
SU47A1 |
