Изобретение относится к контрольноизмерительной технике и к автоматическому управлению и может быть использовано для снятия динамических характеристик нестационарного объема регулирования, например- газотурбин- - ного двигателя.
Целью изобретения является повышение точности измерения динамических характеристик исследуемого объекта регулирования,в частности характеристик изображения импульсной переходной функции объекта по Меллину.
На чертеже показана функциональная схема устройства.
Устройство содержит генератор 1 эталонного изменения управляющего воздействие,вторзпо линию2 задержкии генератор 3 линейно изменяющегося напряжения, входы которых подключены к выходу генератора 1 эталонного изменения управляющего воздействия, управляемый аналоговый делитель .4, к первому сигнальному входу которого подключен генератор 3, а к второму выход второго управляемого интегратора 5,.с выходом управляемого аналоговогоделителя соединены вход первого усилителя 6 с переменным коэффициентом усиления и первый вход инвертирующего сумматора 7, при этом выход первого усилителя 6 с переменным коэффициентом усиления соединен с вторым входом инвертирующего сумматора 7, аналоговый умножитель 8 к первому входу которого подключен выход второго управляемого интегратора 5, а к второму - выход электромеханического датчика 9, управляющие входы управляемого аналогового делителя 4 и второго управляемого интегратора 5 подключены к выходу второй линии.2 задержки, первый управляемый интегратор 10, сигнапьньй вход которого соединен с выходом аналогового умножителя 8, управляющий - с выходом формирователя 11 временного интервала, первую линию 12 задержки, включенную между второй линией 2 задержки и формирователем 1
Исследуемый объект 13 включен между второй линией 2 задержки и электромеханическим датчиком 9, а также последовательно соединенные второй усилитель 14 с переменным коэффициентом усиления, второй блок 15 умножения, второй сумматор 16, управляемый аналоговьй блок 17 памяти, причем вход второго усилителя 14 с переменным коэффициентом усиления подключен к выходу управляемого делителя 4, второй вход второго блока 15 умножения подключен к выходу электромеханического датчика 9, второй вход второго сумматора 16 подключен к выходу первого управляемого интегратора 10, а управляющий вход управляемого аналогового блока 17 памяти подключен к выходу формирователя 11 временного интервала.
Устройство работает следующим образом.
Генератор 1 эталонного изменения управляющего воздействия вырабатывае сигнал, который поступает на второй вход линии 2 задержки и через время задержки v, определяемое второй линией 2 задержки, на вход исследуемого объекта 13..
Электромеханический датчик 9 измеряет реакцию объекта 13 на этот синал. Выходной сигнал генератора 1 эталонного изменения управляющего воздействия также запускает генерато 3 ,на выходе которого формируется линейно изменяющееся во времени t напряжение, поступающее на первый сиг-: нальный вход управляемого аналогового делителя 4. На второй сигнальный: вход управляемого аналогового делителя поступает сигнал у с выхода второго управляемого интегратора 5.
Процессы деления в управляемом аналоговом делителе 4 и- интегрирования во втором управляющем интеграторе 5 начинаются с момента, сдвинутого относительно момента поступления сигнала с выхода генератора 1 эталонного изменения управляющего воздействи на величину j.
С выхода управляемого аналогового делителя 4 сигнал V y/t+-vпоступает на первый вход инвертирующего сумматора 7, на вход первого усилителя 6 с переменным коэффициентом усиления К, и на вход второго усилителя 14 с переменным коэффициентом усиления 1/К.
Выходное напряжение первого усилителя 6 с переменным коэффициентом усиления К подается на второй вход инвертирующего сумматора.7. Сигнал и с выхода инвертирующего сумматора 7 поступает на сигнальный вход второго управляемого интегратора 5. Так как сигнал U на сигнальном входе второго управляемого интегратора 5 и сигнал у на его выходе свя заны между собой зависимостью dy/dt и, а сигнал U на сигнальном входе второго управляемого инте ратора 5 с сигналом V на выходе упр ляемого аналогового делителя 4 зависимостью U -(K+1)V, то результирующий сигнал на выходе второго управляемого интегратора 5 представляет собой результат, решени дифференциального уравнения EZ - (-0 -il-f d(t+) которое при нулевых начальных условиях дает У (t+3-) Напряжение у с вьгкода второго упр ляемого интегратора 5 используется в качестве вспомогательного напряжения, подаваемого на первый вход аналогового умножителя 8, в котором про исходит умножение напряжения у на ре акцию x(t) объекта 13 на эталонное изменение управляющего воздействия. Результирующее напряжение поступает на сигнальный вход первого управляемого интегратора 10. Сигнал Z на выходе усилителя 14 с переменным коэффициентом усиления, обратно пропорциональный коэффициенту усиления первого усилителя подается на первый вход второго аналогового умножителя 15, в котором аналогового умножителя 1Э, в котором происходит умножение напряжения Z происходит умножение напряжения Z на реакцию x(t) объекта 13 на эталон ное изменение управляющего воздействия. Результирующее напряжение поступает на первый вход второго анало гового сумматора 16. На второй вход второго аналогового сумматора 16 поступает напряжение с выхода первого управляемого интегратора 10. Результирующее напряжение поступает на вход аналогового блока 17 памяти. Интегрирование в первом управляемом интеграторе 10 начинается с момента, сдвинутого относительно момента поступления эталонного изме- нения управляющего воздействия на величину ( Это объясняется тем, что для некоторых функций интеграл Меллина с нижним пределом, равным нулю, оказьшается расходящимся. Величина задается первой линией 12 задержки. Процесс интегрирования продолжается до момента Т+у, где Т - интервал интегрирования,величина которо р0- определяется блоком 11 и выбирается исходя из требований к точности затухания переходного процесса в исследуемом объекте 13. При t+f-rt- Tt Ha выходе формирователя 11 действует разрешающий сигнал О, который подается на управляющий вход первого управляемого интегратора 10. При t 7 Т + J- на выходе формирователя 11 временного интервала присутствует запрещающий сигнал 1 и процесс интегрирования прекращается, т.е. на выходе первого управляемого интегратора 10 по истечении времени Т + действует напряжение, амплитуда которого приблизительно равна значению изображения импульсной переходной функции объекта по Меллину, при S -К. F( xH:)(t47., и совпадает с ним при достаточно больших величинах интервала Т интегрирования. На выходе второго аналогового сумматора 16 формируется напряжение, уровень которого определяется за висимостью -vi л -() 1 xUlv.) К Последнее по истечении времени Т приобретает значение xU)()(t)T, оторое запоминается в аналоговом локе 17 памяти. В последнем запнсьгоается и хранитя значение изображения импульсной ереходной функции объекта по Мелину в момент времени Т, который пределяется формирователем 11 вреениого интервала.
$11777986
Генератор 1 эталонного воздейст- Интервал времени Т обычно выбира
ВИЯ ступенчатого воздействия мо-ют в пределах Т O-A),y , где
быть вьшолнен на основе ждущего tTioix максимальное значение постоянмультивибратора . Формирователь 11 времени, характеризующей динамивременного интервала может, бытьвыпол-ческие свойства исследуемого объекнен как одновибратор.та 13 регулирования.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения динамических характеристик объекта регулирования | 1982 |
|
SU1043600A1 |
| Устройство для счета движущихся объектов | 1985 |
|
SU1312623A1 |
| Спектральный анализатор случайных сигналов | 1984 |
|
SU1269048A1 |
| Устройство синхронизации электроразведочных приемников | 1987 |
|
SU1449961A1 |
| СПОСОБ ЧАСТОТНОЙ МОДУЛЯЦИИ КОЛЕБАНИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2595638C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ФАЗОЙ КОЛЕБАНИЙ | 2003 |
|
RU2273950C2 |
| Система управления для объектов с запаздыванием | 1985 |
|
SU1280568A1 |
| Преобразователь среднего значения напряжения | 1982 |
|
SU1114964A1 |
| Устройство для формирования сигнала управления с оптимальными коэффициентами обратной связи | 1984 |
|
SU1242913A1 |
| Устройство для определения амплитуднофазовых характеристик | 1977 |
|
SU664157A1 |
УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ДИНАМИЧЕСКИХ ХАРАКТЕРИСТИК ОБЪЕКТА РЕГУЛИРОВАНИЯ по авт.св. № 1043600, отличающееся тем, что, с целью повьш1ения точности измерения, оно содержит последовательно со единенные второй усилитель сперемен™ ным коэффициентом усиления, второй блок умножения, второй сумматор и управляемый аналоговый блок памяти, вход второго усилителя с переменным коэффициентом усиления подключен к выходу управляемого аналогового делителя, второй вход второго блока умножения подключен к выходу электромеханического датчика; второй вход (Л второго сумматора подключен к выходу первого управляемого интегратора, а управляюпщй вход управляемого аналогового блока памяти подключен к выходу формирователя временного интервала. 41 -4J 4J ;о 00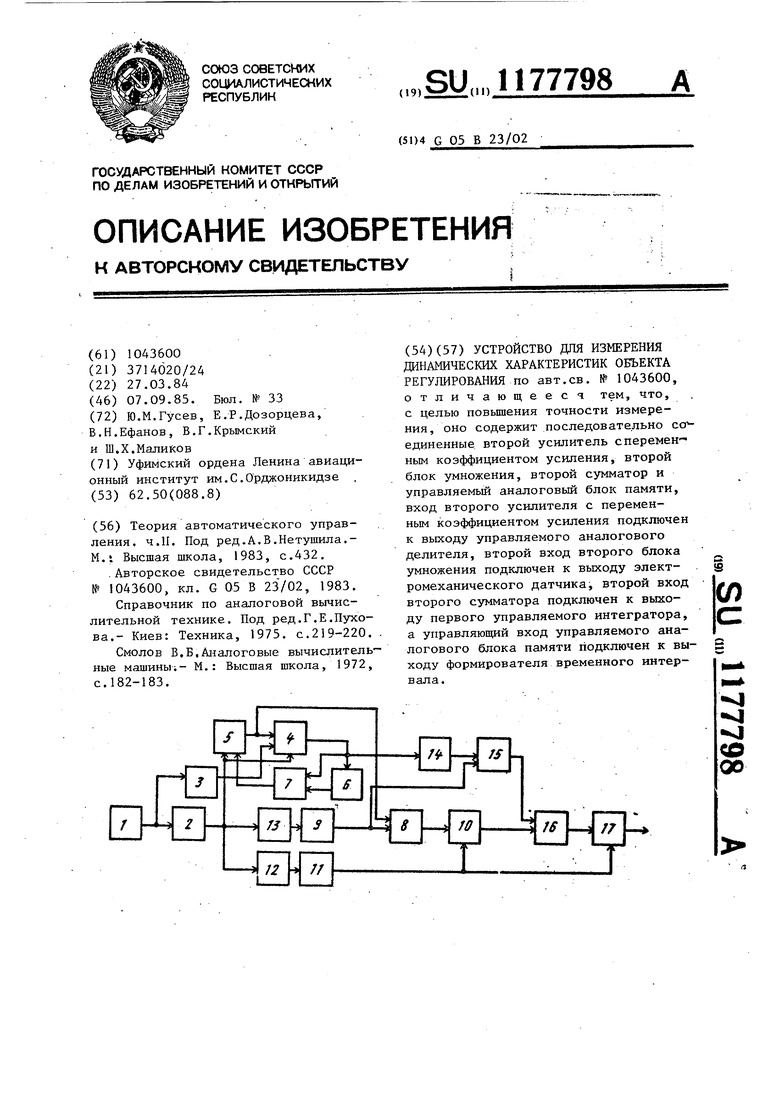
| Теория автоматического управления, ч.И | |||
| Под ред.А.В.Нетушила.М | |||
| Высшая школа, 1983, с.432 | |||
| Устройство для измерения динамических характеристик объекта регулирования | 1982 |
|
SU1043600A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Справочник по аналоговой вычислительной технике | |||
| Под ред.Г.Е.Пухова.- Киев: Техника, 1975 | |||
| Прибор для записи звуковых волн | 1920 |
|
SU219A1 |
| Смолов В,Б,Аналоговые вычислительные машины;- М.: Высшая школа, 1972, с.182-183. | |||
