Изобретение относится к автоматике и может найти применение при управлении нестационарными объектами с запаздыванием в условиях действия неконтролируемых возмущений в химической, нефтехимической и металлургической отраслях промышленности.
Целью изобретения является упрощение системы и повьшение точности.
На чертеже приведена структурная схема системы управления.
Система управления содержит первый сумматор 1, первьй регулятор 2, первый усилитель 3, объект 4 управ10
11задержки и первый вход третьег сумматора 13,
Выходной сигнал Y(t) второго ка 11 задержки подается на первый вход второго сумматора 12 и на вт вход второго делителя 14, а также версно на второй вход третьего сум матора 13,
Сигнал с выхода второго суммат
12поступает на первый вход второ делителя 14, выходной сигнал котор го равен отношению отклонения сиг ла Y(t) выходе объекта 4 управлени от сигнала Y,(t) выхода второго бл
ления, первый блок 5 задержки, первый ка 11 задержки к величине сигнала
интегратор 6, второй усилитель 7, второй интегратор 8, первый делитель 9 5, модель 10 объекта, второй блок 11 задержки, второй сумматор 12, третий сумматор 13, второй делитель 14, умнолснтель 15, второй регулятор 165 блок 17 ограничения, формирователь 18 сигналов уровня ограничения и задатчик 19 входного сигнала.
усилитель 3 имеет перемен- .ный коэффициент усиления, который регулируется по второму входу И предельная величина которого задается блоком 17 ограничения,
Значения верхнего U и нижнего и,, уровней ограничения задаются фор- М1нрователем 18 сигналов уровня ограничения, i
Система управления для объектов с запаздыванием работает следующим образом
На первьш вход первого сумматора 1 подается сигнал задания для систеьш управления, на второй и третий входы которого подаются инверсно сигналы соответственно с выхода объекта 4 управления и третьего сумматора 13,
Выходной сигнал первого сумматора 1 через первый регулятор и первый усилитель 3 с переменным коэффициентом усиления поступает на вход объекта 4 управления с запаздыванием, на вход которого действует неконтролируемое возм тцение f(t). Выходной сигнал Y(t) объекта 4 управления подается инверсно на вторые входы первого 1 и второго 12 сумматоров.
Выходной сигнал первого регулятора 2 U(t) поступает также на вход модели 10 объекта, выходной сигнал которой подается на вход второго блока
11задержки и первый вход третьего сумматора 13,
Выходной сигнал Y(t) второго блока 11 задержки подается на первый вход второго сумматора 12 и на второй вход второго делителя 14, а также инверсно на второй вход третьего сумматора 13,
Сигнал с выхода второго сумматора
12поступает на первый вход второго делителя 14, выходной сигнал которого равен отношению отклонения сигнала Y(t) выходе объекта 4 управления от сигнала Y,(t) выхода второго блока 11 задержки к величине сигнала
(t).
0
5
0
5
0
5
0
5
Сигнал с выхода первого усилителя 3 с переменным коэффициентом усиления подается на вход первого блока 5 задержки, в котором осуществляется задерлска сигнала на время запаздывания объекта 4 управления.
Выходной сигнал первого блока 5 задержки поступает на вход первого интегратора 6, который осуществляет интегрирование на скользящем интервале времени входного сигнала, а так-, же на второй вход умнолштеля 15, на первый вход которого поступает сигнал с выхода второго делителя 14. Сигнал с выхода первого интегратора 6 через второй усиу итель 7 подается на второй вход первого делителя 9, ,на первый вход которого поступает сигнал с выхода второго и;.тсгратора
8,осуществляющего интегрирозанке на скользящем интерва тхе в -емени входного сигнала, поступающего с выхода умножителя 15,
Выходной сигнал первого делителя
9,равный отноглению выходного сиг-нала второго и 5тегратора 8 к вьжод- ному сигналу второго усилителя 7, подается на вход второго узгулятора 16, Сигнал U(t) с выхода второго регулятора 16 поступает на. первый вход блока 17 ограничения, на второй и третий входы крторог.о подаются пороговые сигналы И и И ограничения выходной величины блока соответственно верхней и низкней границ. Выходной сигнал блока 17 ограничения ) подается на второй вход первого усилителя 3 к является управляющим сигналом, который изменяет коэффициент усиления первого усилителя 3,
При реализации делителей сигналов возможны незначительные временные задержки выходных сигналов, возникаJ. 1
ющие из условия физической реализуемости операции деления, а также возникают погрешности вычисления . выходного сигнала. Однако их действие на работоспособность и устойчивость системы управления при наличии в ней интеграторов, а также блока ограничения сигнала самонастройки несущественно. Блоки деления сохраняют работоспособность и не выходят из строя при величине сигнала делителя равной нулю, поскольку содержит депи ограничения выходного сигнала,
Предлагаемая система управления обладает повышенной точностью само- настройки коэффициента усиления канала управления, а это, в свою очередь повышает качество работы в целом„ Кроме того, система сохраняет устойчивость и работоспособность в уело- ВИЯХ действия на объект управления неконтролируемых возмущений широкого спектра.
Формула изобретения
Система управления для объектов .с запаздыванием, содержащая последовательно соединенные задатчик входного сигнала и первый сумматор, а также последовательно соединенные первый регулятор, первый усриитель и объект управления, выход которого соединен с вторым входом первого
сумматора и вторым сумматором, второй 35 с третьим входом первого сумматора.
вход которого соединен с выходом второго блока задержки и третьим сумматором, второй вход которого соединен с входом второго блока задержки и соединен с выходом модели объекта, вход которой соединен с выходом первого регулятора, выход первого усилителя через последовательно включенные первый блок задержки, первый интегратор и второй усилитель соеди- нен с первым делителем, второй вход которого соединен с выходом второго интегратора, отличающая ся тем, что, с целью упрощения системы и повьпиения точности, в нее дополнительно введены формирователь сигналов уровня ограничения, последовательно соединенные второй регулятор и блок ограничения, а также последовательно соединенные второй делитель и умножитель, второй вход которого соединен с выходом первого блока за
держки, а выход - с вторым интегратором, первый и второй входы второго делителя соединены соответственно с выходом второго сумматора и выходом второго блока задержки, выходы формирователя сигналов уровня ограничения соединены с соответствующими входами блока ограничения, выход которого соединен с вторым входом первого усилителя, выход первого делителя соединен с вторым регулятором, а выход третьего сумматора соединен
12
Редактор И.Рыбченко
Составитель Б.Кирсанов
Техред Н.Попов гчКорректор С.Шекмар
7065/52
Тираж 836Подписное
ВНШПИ Государственного комитета СССР
по делам изобретений и отк-рытий 113035, Москва, Л{--35. Раутская наб,, д, 4/5
Производс- зенно-полиграфическое предприятие, г. Укг ород, ул. Проектная, 4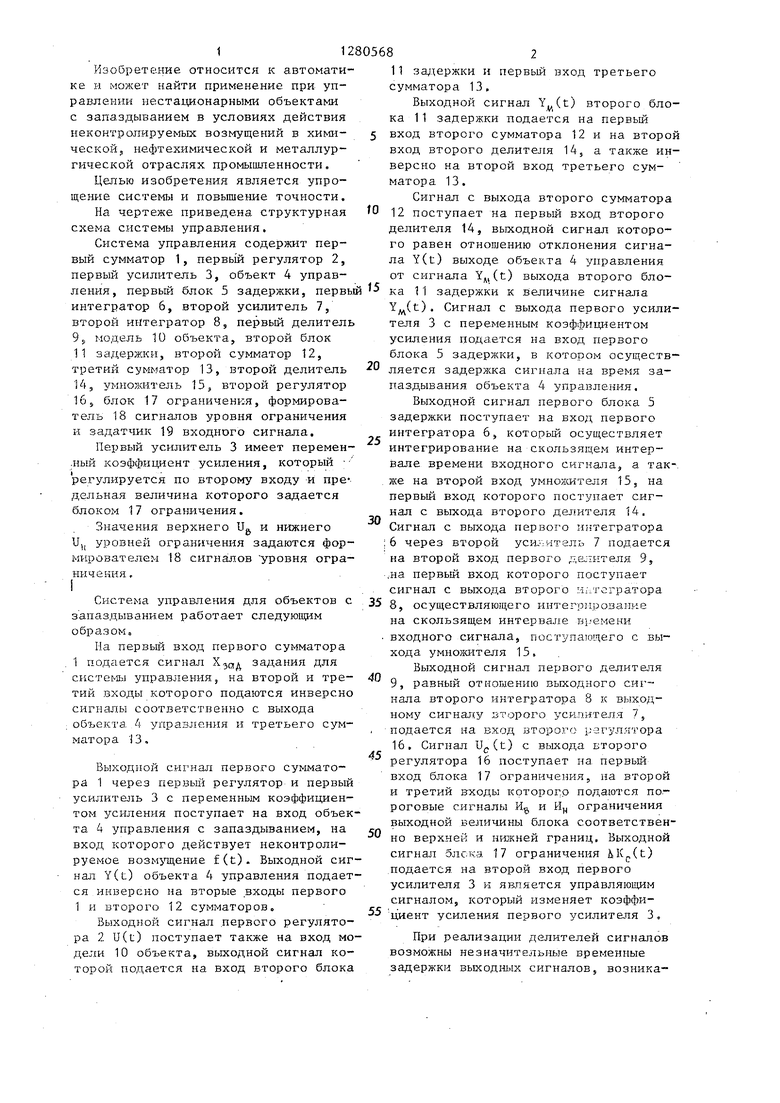
| название | год | авторы | номер документа |
|---|---|---|---|
| Система автоматического управления | 1986 |
|
SU1409971A1 |
| Система управления для объектов с запаздыванием | 1979 |
|
SU860002A1 |
| Самонастраивающаяся система комбинированного регулирования | 1986 |
|
SU1339494A1 |
| Адаптивная система управления | 1986 |
|
SU1399700A1 |
| Система автоматического управления | 1982 |
|
SU1113780A2 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ | 2013 |
|
RU2541848C1 |
| Адаптивная система автоматического управления | 1987 |
|
SU1441351A1 |
| Самонастраивающаяся система комбинированного регулирования | 1986 |
|
SU1388826A2 |
| Самонастраивающаяся система комбинированного регулирования | 1986 |
|
SU1386957A1 |
| Адаптивный регулятор | 1984 |
|
SU1149215A1 |
Изобретение относится к системам автоматического управления объектов с запаздыванием в условиях действия неконтролируемых возмущений. Целью изобретения является упрощение системы и повышение точности, Система содержит три сумматора, два регулятора, два делителя, объект управления, два блока задержки,-два интегратора, модель объекта, умножитель, блок ограничения, блок сигналов уровня ограничения и задатчик входного сигнала. Сущность изобретения заключается в повышении точности настройки коэффициента усиления канала управления путем минимизации величины среднеинтегрального .критерия по отклонению коэффициента усиления канала управления от эталона, 1 ил. ю 00
| Догановский С.А., Иванов В.А, Устройства запаздывания и их применение в автоматических системах | |||
| М.: Машиностроение | |||
| Приспособление к индикатору для определения момента вспышки в двигателях | 1925 |
|
SU1969A1 |
| Тепловой измеритель силы тока | 1921 |
|
SU267A1 |
| Система управления для объектов с запаздыванием | 1979 |
|
SU860002A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
