Изобретение относится к управлению шахтным подъемом, в частности к устройствам управления предохранительным торможением шахтных подъемных установок.
Цель изобретения - повышение надежности устройства.
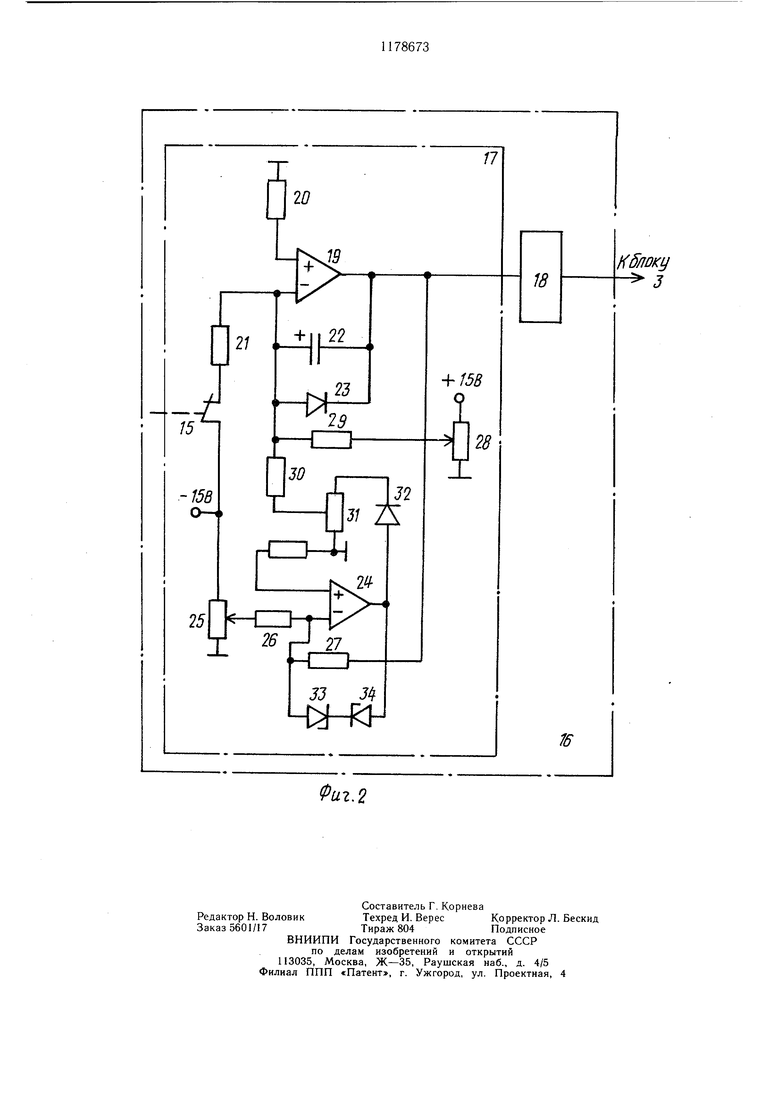
На фиг. 1 представлена функциональная схема устройства; на фиг. 2- принципиальная схема блока имитации движения подъемной машины.
Устройство (фиг. 1) содержит датчики 1 и 2 скорости врашения барабана подъемной машины, подключенные к одним входам переключателя 3 рода работ, одни из выходов которого соединены с одними входами блоков 4 и 5 управления пневмоклапанами 6-8 и 9-11 привода тормоза. Выходы блоков 4 и 5 соединены с входами блока 12 контроля идентичности работы блоков 4 и 5 управления пневмоклапанами. Выход блока 12 и один из выходов переключателя 3 соединены с входами узла 13 запрета последуюш,его пуска и элементами 14 сигнализации.
Устройство содержит на своем входе ключевой элемент 15 подачи сигнала торможения, к выходу которого подключены другие входы блоков 4 и 5 и вход блока 16 имитации движения подъемной машины, состояший из последовательно соединенных формирователя 17 кривой изменения скорости движения и преобразователя 18 аналогового сигнала в импульсный.
Формирователь 17 содержит интегратор, выполненный на операционном усилителе 19 (фиг. 2) с резисторами 20 и 21 и конденсатором 22 и диодом 23, и компаратор, выполненный на операционном усилителе 24, резисторах 25-31, диоде 32 и стабилитронах 33 и 34.
Устройство работает следуюи1им образом.
Переключатель 3 рода работ имеет два положения: «Проверка и «Работа. При
нахождении его в состоянии «Работа сигналы действительной скорости вращения подъемной машины от датчиков 1 и 2 поступают в блоки 4 и 5 управления, где вырабатываются сигналы замедления подъемной машины и на их основе формируются управляющие сигналы для пневмоклапанов 6-11 на выпуск воздуха из тормозных цилиндров. При этом блок 12 контролирует идентичность сигналов замедления и одновременность достижения
нулевых скоростей в блоках 4 и 5. В случае выявления рассогласований хотя бы по одному из контролируемых параметров машинист подъемной машины имеет возможность довести сосуд до одной из конечных точек,
элемент 14 сигнализации подает звуковой и световой сигнал, а узел 13 запрета последующего пуска делает невозможным пуск подъемной машины без устранения неисправности. При переводе переключателя 3 в положение «Проверка блоки 4 и 5 управления
отключаются от датчиков 1 и 2 скорости и подключаются к выходу блока 16, выходное напряжение которого задает контрольный график скорости подъемной машины в процессе торможения последней от номинальной
скорости до нуля. Запуск блока 16 производится элементом 15. Устройство для управления предохранительным торможением и исполнительные механизмы привода предохранительного тормоза реагируют на имитационный сигнал, формируемый усилителями 19 и 24 как на реальный процесс предохранительного торможения и соответствующим образом выполняют свои функции. В случае отклонения реакции на контрольный имитационный сигнал от нормы производится запрет последующего пуска машины и появляются световая и звуковая сигнализации. При попытке пуска подъемной машины в случае нахождения переключателя 3 в положении «Проверка появляется световая и звуковая сигнализация, а пуск не осуществляется.
Фаг.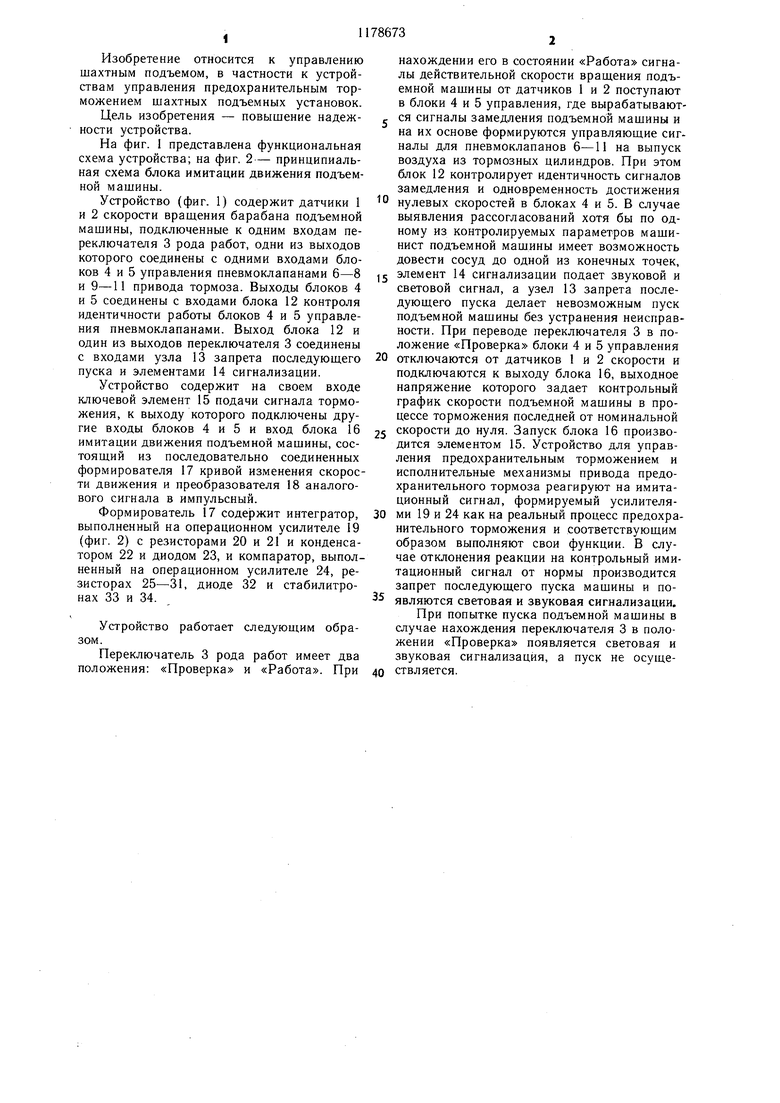
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления предохранительным торможением шахтной подъемной машины | 1986 |
|
SU1419972A2 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ШАХТНОЙ ПОДЪЕМНОЙ МАШИНОЙ | 1991 |
|
RU2010766C1 |
| Устройство для управления приводом шахтной подъемной машины | 1987 |
|
SU1447743A1 |
| ЭЛЕКТРОПРИВОД | 2012 |
|
RU2531380C2 |
| Устройство управления шахтной подъемной машиной | 1982 |
|
SU1191403A1 |
| Устройство для управления приводом шахтной подъемной машины | 1985 |
|
SU1296500A1 |
| Устройство для управления тормозом шахтной подъемной машины | 1988 |
|
SU1652267A1 |
| Система управления тормозом шахтной подъемной машины | 1981 |
|
SU1008150A1 |
| Устройство для управления тормозом шахтной подъемной машины | 1989 |
|
SU1717513A1 |
| ЭЛЕКТРОПРИВОД | 2015 |
|
RU2586630C1 |
УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРЕДОХРАНИТЕЛЬНБ1М ТОРМОЖЕНИЕМ ШАХТНОЙ ПОДЪЕМНОЙ МАШИНЫ, содержащее блоки управления пневмоклапанами приводов тормоза, к одним входам которых подключен ключевой элемент подачи сигнала торможения, а к выходам - блок контроля идентичности работы блоков управления пневмоклапанами с подключенными к его выходу элементами сигнализации и датчики контроля скорости вращения барабана подъемной мащины, отличающееся тем, что, с целью повыщения надежности, оно снабжено подключенным своим входом к выходу ключевого элемента подачи сигнала торможения блоком им.итации движения подъемной машины, выполненным из последовательно соединенных формирователя кривой изменения скорости движения и преобразователя аналогового сигнала в импульсный, подключенным к выходу последнего одним входом переключателем рода работы устройства, другие входы которого соединены с датчиками скорости вращения барабана подъемной машины, и подключенным к одному вы.ходу переключателя работы устройства и к выходу блока контро о ля идентичности работы блоком управления пневмоклапанами узлов запрета последуюсо щего пуска подъемной машины, при этом другие выходы переключателя рода работ устройства соединены с другими входами блоков управления пневмоклапанами приво- с дов тормоза. 00 Од со
| Создание и совершенствование шахтных стационарных установок | |||
| Труды ВНИИГМ им | |||
| Федорова Н | |||
| М.: Донецк, 1980, с | |||
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
