Изобретение относится к шахтному подъему и может быть использовано для ynpasi- ления тормозом шахтных подъемных машин и лебедок.
Цель изобретения - повышение точности управления и расширение функциональ- ных возможностей устройства.
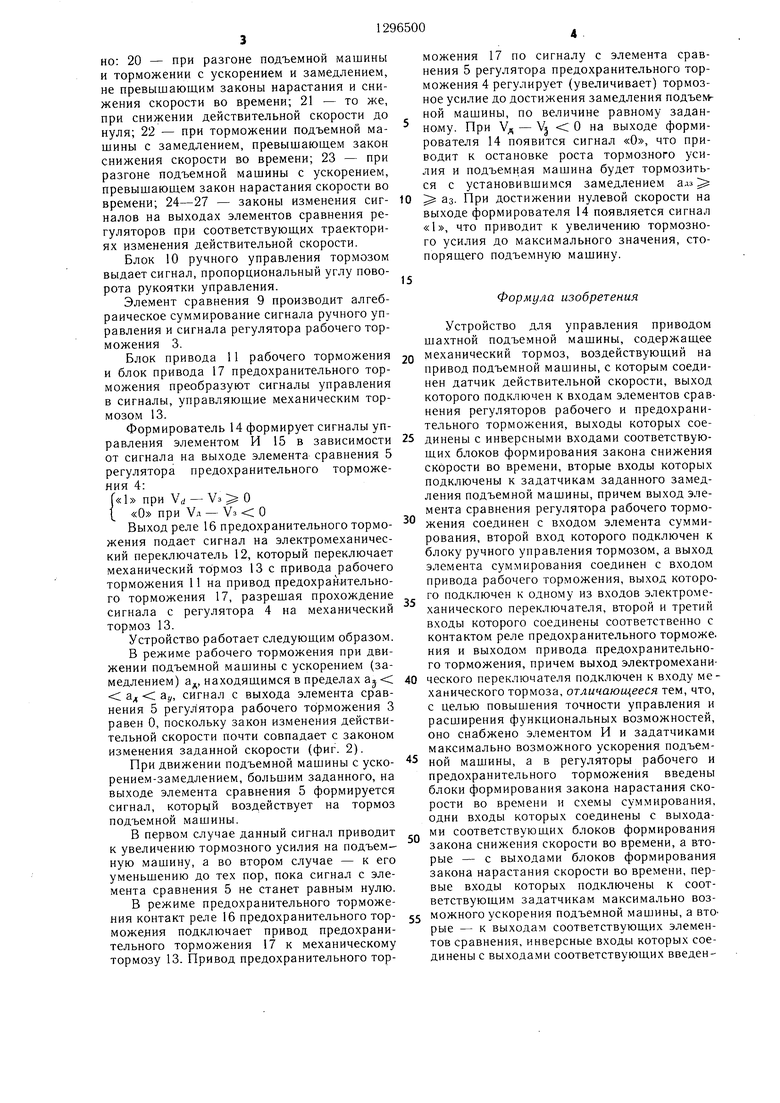
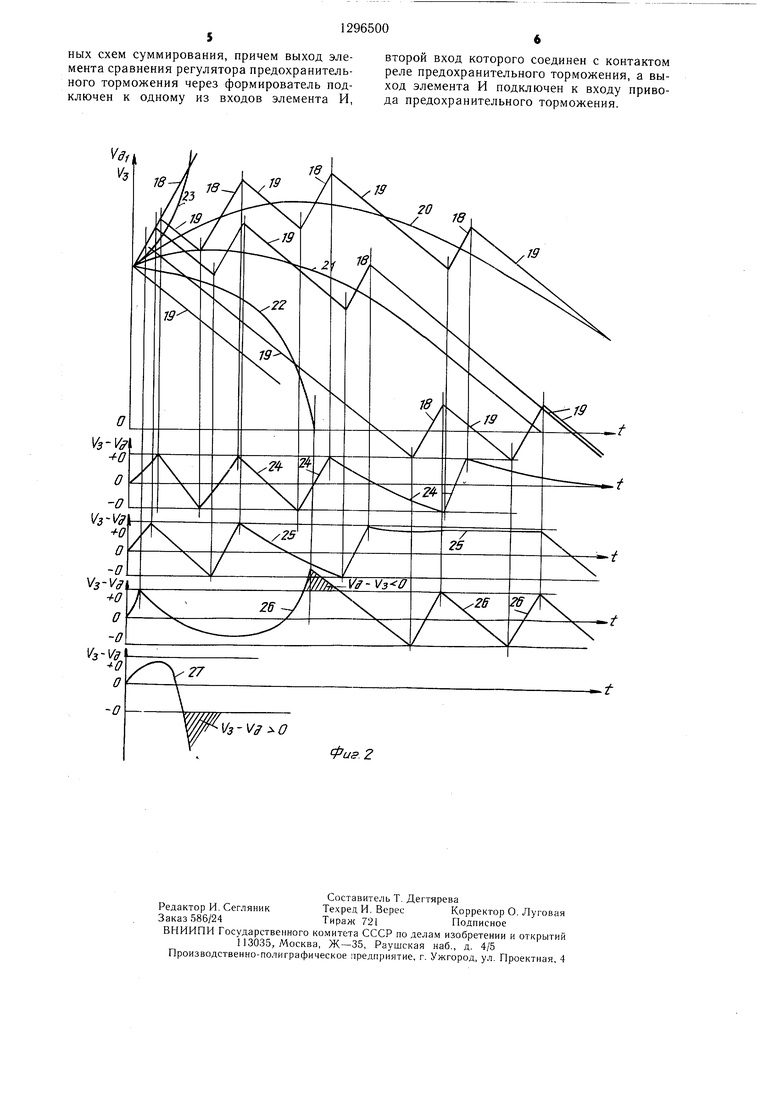
На фиг. 1 приведена схема устройства; на фиг. 2 - график изменения во времени действительной и заданной скорости подъемной машины, формируемой соответст- вуюшими блоками регуляторов.
Устройство состоит из подъемной машины 1, соединенной с датчиком скорости 2, регулятора рабочего торможения 3 и регулятора предохранительного торможения 4. Регуляторы рабочего 3 и предохранительного 4 торможения состоят из элементов сравнения 5, прямые входы которых соединены с выходом датчика скорости 2, а инверсные - с выходами элементов суммирования 6. Одни входы эле- ментов суммирования 6 регуляторов рабочего 3 и предохранительного 4 торможения подключены к соответствуюш,им выходам блоков 7 формирования законов снижения скорости во времени, а вторые - к соответствующим выходам блоков 8 форми- рования закона нарастания скорости во времени. Выходы элементов сравнения 5 соединены соответственно с инверсными входами блоков 7 формирования закона снижения скорости во времени и с одними входами блоков 8 формирования закона на- растания скорости во времени. Вторые входы блоков 8 подключены к задатчикам максимально возможного ускорения подъемной машины, а вторые входы блоков 7 - к задатчикам заданного замедления подъемной машины.
Выход элемента сравнения 5 регулятора рабочего торможения 3 соединен со входом элемента суммирования 9, второй вход которого подключен к выходу блока 10 ручного управления тормозом. Выход элемента суммирования 9 подключен ко входу привода рабочего торможения 11, выход которого соединен с первым входом электромеханического переключателя 12, выход которого подключен к механическому тормозу 13. Выход элемента сравнения 5 регулятора предохранительного торможения 4 соединен через формирователь 14 со входом элемента И 15, второй вход которого подключен к выходу реле 16 предохранительного торможения и управляюш.ему входу электромеханического переключателя 12, а выход через привод предохранительного торможения 17 подключен ко второму входу электромеханического переключателя 12.
Блоки 8 регуляторов рабочего 3 и предохранительного 4 торможения формируют законы нарастания скорости во времени при наличии сигналов с выходов элементов сравнения 5 соответствующих Уд-Уз О, где
t LI
Уд - величина действительной скорости; УЗ - величина заданной скорости.
Законы нарастания скорости во времени определяются
У, (t)y.. + 5 a,dt,
ti
где ay-максимально возможное ускорение разгона подъемной машины для регулятора 3 или максимально возможное ускорение свободного выбега подъемной машины для регулятора 4;
Узн(1) - величина нарастания заданной скорости во времени;
Уд; - величина действительной скорости в момент появления сигнала на входах блоков 8;
мом.ент времени переключения, т.е. момент появления сигнала с выхода элемента сравнения 5 Уд-Уз 0; i - порядковый номер переключения. Блоки 7 формируют законы снижения скорости во времени при наличии сигналов с выходов элементов сравнения 5 соответствующих Уд - УЗ ; 0. Законы снижения скорости во времени определяются
Q 5 0
5
0
5
0
5
ysc(t) У,,.,
V
гдеУзс(1) -величина снижения заданной скорости во времени; максимально возможное замедление торможения подъемной машины для регулятора 3 или базисное (заданное замедление подъемной машины при предохранительном торможении для регулятора 4);
величина действительной скорости в момент появления сигнала на входах блоков 7; момент времени переключения, т.е. момент появления сигнала с выхода элемента сравнения 5
V. - У, 0;
порядковый номер переключения.
Блоки 6 производят алгебраическое суммирование входных сигналов. На их выхоаз
У.-t;J
дах формируется сигнал закона заданной скорости
У:,(1) Уз.,(1) +Узс(1).
Работа регуляторов рабочего 3 и предохранительного 4 торможения при разорванных связях выходов регуляторов на элементы 9 и 15 иллюстрируется на фиг. 2, где: 18 - законы нарастания скорости во времени; 19 - законы снижения скорости во времени; 20- 23 - траектории изменения действительной скорости подъемной машины соответствен
но: 20 - при разгоне подъемной машины и торможении с ускорением и замедлением, не превышающим законы нарастания и снижения скорости во времени; 21 - то же, при снижении действительной скорости до нуля; 22 - при торможении подъемной машины с замедлением, превышаюш,ем закон снижения скорости во времени; 23 - при разгоне подъемной машины с ускорением, превышаюш,ем закон нарастания скорости во времени; 24-27 - законы изменения сигналов на выходах элементов сравнения регуляторов при соответствующих траекториях изменения действительной скорости.
Блок 10 ручного управления тормозом выдает сигнал, пропорциональный углу поворота рукоятки управления.
Элемент сравнения 9 производит алгебраическое суммирование сигнала ручного управления и сигнала регулятора рабочего торможения 3.
Блок привода 11 рабочего торможения и блок привода 17 предохранительного торможения преобразуют сигналы управления в сигналы, управляющие механическим тормозом 13.
Формирователь 14 формирует сигналы управления элементом И 15 в зависимости от сигнала на выходе элемента сравнения 5 регулятора предохранительного торможения 4:
Г«1 при Vd - Уз О ( «О при Уд - УЗ О
Выход реле 16 предохранительного торможения подает сигнал на электромеханический переключатель 12, который переключает механический тормоз 13 с привода рабочего торможения 11 на привод предохранительного торможения 17, разрешая прохождение сигнала с регулятора 4 на механический тормоз 13.
Устройство работает следующим образом.
В режиме рабочего торможения при движении подъемной машины с ускорением (замедлением) а, находящимся в пределах ; ад ; ау, сигнал с выхода элемента сравнения 5 регулятора рабочего торможения 3 равен О, поскольку закон изменения действительной скорости почти совпадает с законом изменения заданной скорости (фиг. 2).
При движении подъемной машины с ускорением-замедлением, большим заданного, на выходе элемента сравнения 5 формируется сигнал, который воздействует на тормоз подъемной машины.
В первом случае данный сигнал приводит к увеличению тормозного усилия на подъемную машину, а во втором случае - к его уменьшению до тех пор, пока сигнал с элемента сравнения 5 не станет равным нулю.
В режиме предохранительного торможения контакт реле 16 предохранительного торможения подключает привод предохранительного торможения 17 к механическому тормозу 13. Привод предохранительного тор
можения 17 по сигналу с элемента сравнения 5 регулятора предохранительного торможения 4 регулирует (увеличивает) тормозное усилие до достижения замедления подъемной машины, по величине равному заданному. При Уд - У О на выходе формирователя 14 появится сигнал «О, что приводит к остановке роста тормозного усилия и подъемная машина будет тормозиться с установившимся замедлением адз аз. При достижении нулевой скорости на выходе формирователя 14 появляется сигнал «1, что приводит к увеличению тормозного усилия до максимального значения, стопорящего подъемную машину.
15
Формула изобретения
0
5
0
0
5
Устройство для управления приводом шахтной подъемной машины, содержащее механический тормоз, воздействующий на привод подъемной машины, с которым соединен датчик действительной скорости, выход которого подключен к входам элементов сравнения регуляторов рабочего и предохранительного торможения, выходы которых соединены с инверсными входами соответствующих блоков формирования закона снижения скорости во времени, вторые входы которых подключены к задатчикам заданного замедления подъемной машины, причем выход элемента сравнения регулятора рабочего торможения соединен с входом элемента суммирования, второй вход которого подключен к блоку ручного управления тормозом, а выход элемента суммирования соединен с входом привода рабочего торможения, выход которого подключен к одному из входов электромеханического переключателя, второй и третий входы которого соединены соответственно с контактом реле предохранительного торможе. ния и выходом привода предохранительного торможения, причем выход электромеханического переключателя подключен к входу механического тормоза, отличающееся тем, что, с целью повышения точности управления и расширения функциональных возможностей, оно снабжено элементом И и задатчиками максимально возможного ускорения подъемной машины, а в регуляторы рабочего и предохранительного торможения введены блоки формирования закона нарастания скорости во времени и схемы суммирования, одни входы которых соединены с выходами соответствующих блоков формирования закона снижения скорости во времени, а вторые - с выходами блоков формирования закона нарастания скорости во времени, первые входы которых подключены к соответствующим задатчикам максимально возможного ускорения подъемной машины, а втО рые - к выходам соответствующих элементов сравнения, инверсные входы которых соединены с выходами соответствующих введен5
ных схем суммирования, причем выход элемента сравнения регулятора предохранительного торможения через формирователь подключен к одному из входов элемента И,
второй вход которого соединен с контактом реле предохранительного торможения, а выход элемента И подключен к входу привода предохранительного торможения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления приводом тормоза шахтной подъемной машины | 1988 |
|
SU1680614A1 |
| Устройство для регулируемого предохранительного торможения подъемной машины | 1977 |
|
SU691375A1 |
| Устройство для управления предохранительным торможением подъемной установки | 1975 |
|
SU753761A1 |
| Устройство для управления тормозными режимами подъемной машины | 1979 |
|
SU781170A1 |
| Устройство для управления приводом шахтной подъемной машины | 1987 |
|
SU1447743A1 |
| Устройство для управления наклонной шахтной подъемной установкой | 1981 |
|
SU971770A1 |
| Тормоз подъемной машины | 1988 |
|
SU1516459A1 |
| Устройство для регулируемогопРЕдОХРАНиТЕльНОгО ТОРМОжЕНия пОд'ЕМ-НОй МАшиНы | 1979 |
|
SU812683A2 |
| Способ предохранительного торможения шахтного подъемника и устройство для его осуществления | 1978 |
|
SU763229A1 |
| Устройство для регулируемого предохранительного торможения подъемной машины | 1977 |
|
SU787348A2 |
Изобретение относится к шахтному подъему и может быть использовано для управления тормозом шахтных подъемных машин и лебедок. Цель изобретения - повышение точности управления и расширение функциональных возможностей устройства. Устройство содержит подъемную машину I, соединенную с датчиком 2 скорости, регулятор 3 рабочего торможения и регулятор 4 предохранительного торможения. Регуляторы 3 и 4 торможения состоят из элементов сравнения 5. 2 ил. ч п (С (Л ю ;о 05 О1 фиг.
Фиг.2
J9
| Устройство для управления приводом шахтных подъемных машин | 1972 |
|
SU643412A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
| Г - | |||
