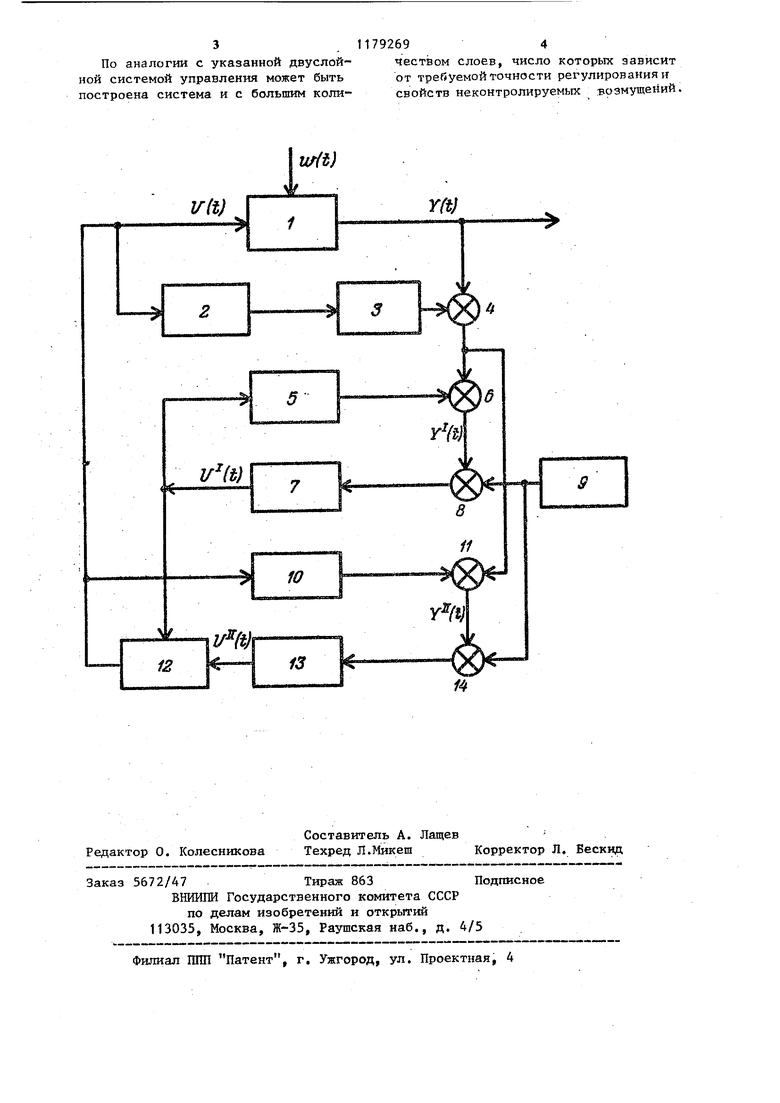
Изобретение относится к автомати ческому управлению и регулированию и может быть использовано для построения систем управления техническими объектами, содержащими значительные запаздывания и подверженными влиянию неконтролируемых возмущений . Предполагается, что динамика объ екта по каналам регударования описы вается передаточной функцией -W L(p) -Pi W(p), Wj,(p)e Q О где L(p) и М(р) - полиномы от р, ст пень полинома L(p) не превышает степень полинома М(р) ; ij - время запаздывани Задача управления заключается в обеспечении инвариантности выходной величины (сигнала) объекта упра ления от неконтролируемых возмущени Цель изобретения - повьЬиение точ нести регулирования. Па чертеже приведена блок-схема системы автоматического управления. Система управления содержит объе Iуправления, первую модель 2 объек та без запаздывания, блок 3 задержки, второй блок 4 сравнения, вторую модель 5 объекта без запаздывания, третий блок 6 сравнения, первый регулятор 7, первый блок 8 сравнения, задатчик 9, третью модель 10 объекта без запаздывания , четвертый блок IIсравнения, сумматор 12, второй регулятор 13, пятый блок 14 сравнения . На чертеже обозначено; U(t) управляющее воздействие в t-й момент времени; Y(t) - выходной сигнала объекта управления; U(t) и U-(t) - управляющие воз{5ействия. первого и второго слоя; YA(t) и (t) - натурно-модельные выходны сигналы первого и второго слоя; w(t) - неконтролируемое возмущение, Система автоматического управлен работает следующим образом. Сигнал об управляющем воздействи U(t) преобразуется в первой модели объекта без запаздьгаания с оператором W.,(p) и задерживается в блоке 3 задержки на время запаздьюания /t . Выходной сигнал 8 Y(t) блока 3 за -ержки об эффектах управляющих воздействий U(t -о) вычитается во втором блоке 4 сравнения из выходного сигнала Y(t) объекта 1 управления, в результате получается сигнал Y рб эффектах неконтролируемых возмущений, приведенных расчетным путем к выходу объекта 1 управления. С выхода второго блока 4 сравненмния сигнал Y идет на первьй слой управления, где на него в третьем блоке 6 сравнения налагается сигнал с выхода второй модели 5 объекта без запаздывания. Полученный в резз льтате натурно-модельный выходной сигнал Y первого слоя вычитается в первом блоке 8 сравнения из сигнала о заданном значении Y, поступающего с задатчика 9. Сигнал об ошибке регулиров.ания первого слоя (Y - Y) идет на первьй регулятор 7, например, с пропорционально-интегральным законом регулирования. Настройки первого регулятора 7 выбираются традиционными методами, а затем уточняются в действующей системе управления. В первом регуляторе 7 вырабатывается сигнал об -управляющем воздействии u первого слоя. Этот сигнал поступает на вход второй модели 5 объекта без запаздывания и во второй слой на сумматор 12. Во втором слое управления из сигнала Y с выхода второго блока 4 сравнения вьрштается в четвертом блоке 11 сравнения выходной сигнал третьей модели 10 объекта без запаздывания, полученный сигнал Y вычитается в-пятом блоке 14 сравнения из выходного сигнала задатчика 9. Сигнал об ошибке регулирования второго слоя (Y - Y) идет на второй регулятор 13, например, также с пропорционально-интегральным законом регулирования. Выходной сигнал u зтого регулятора 13 алгебраически суммируется э суь1маторе 12 с сигналом и, полученный сигнал U поступает на реализацию в объект 1 управления и На вход третьей модели объекта без запаздьюания. Таким образом, второй слой управления работает в приращениях к управляющим воздействиям первого слоя, что увеличивает его быстродействие, а в результате повышается точность регулирования всей системы. 3 По аналогии с указанной двуслойной системой управления может быть построена система и с большим коли11792694чеством слоев, число которых зависит от требуемой точности регулирования и свойств неконтролируемых возмущений.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления объектом с запаздыванием | 1984 |
|
SU1200241A1 |
| Адаптивный регулятор | 1984 |
|
SU1149215A1 |
| Устройство для компенсации запаздываний | 1986 |
|
SU1409966A1 |
| Система управления | 1985 |
|
SU1285430A1 |
| Адаптивная система регулирования многомерного объекта | 1981 |
|
SU1174901A1 |
| Адаптивная система контроля и регулирования | 1982 |
|
SU1070507A1 |
| Адаптивная двухцелевая система управления | 1982 |
|
SU1100608A1 |
| Система экстремального регулирования | 1981 |
|
SU1029140A1 |
| Система автоматического регулирования | 1988 |
|
SU1569802A1 |
| Адаптивное регулирующее устройство | 1982 |
|
SU1064271A1 |
СИСТЕМА УПРАВЛЕНИЯ, содержащая объект управления, первьй регулятор, последовательно включенные задатчик и первьй блок сравнения, последовательно включенные первую модель объекта без запаздывания, блок задержки, второй блок сравнения и третий блок сравнения, вход первой модели связан с .входом объекта управления,о тличающа я тем, что, с целью повьппения точности регулирования, в нее введены вторая и третья модели объекта без запаздывания, последовательно включенные четвертый блок сравнения, пятый блок сравнения, второй регулятор и сумматор, выход которого соединен с входами объекта управления и третьей модели объекта без запаэдьюания, выход объекта управления подключен к второму входу второго блока сравнения, выход первого регулятора соединен с вторым входом сз мматора и через последовательно включенные вторую модель объекта без запаздьтания, третий блок сравнения и первый блок сравнения - со своим входом, первый вход четвертого блока сравнения соединен с выходом третьей модели объекта без запаздьтания, а второй вход - с выходом второго блока сравнения, выход задатчика подключен к второму входу пятого блока сравнения.
| Турецкий X | |||
| Анализ и синтез систем управления с запаздьшанием, М., Машиностроение, с | |||
| Устройство для вытяжки и скручивания ровницы | 1923 |
|
SU214A1 |
