Изобретение относится к машиностроению и может найти применение, например, при роботизированной сборке изделий, а также при автоматизации других технологических процессов.
Целью изобретения является расширение технологических возможностей за счет расширения зоны очувствления.
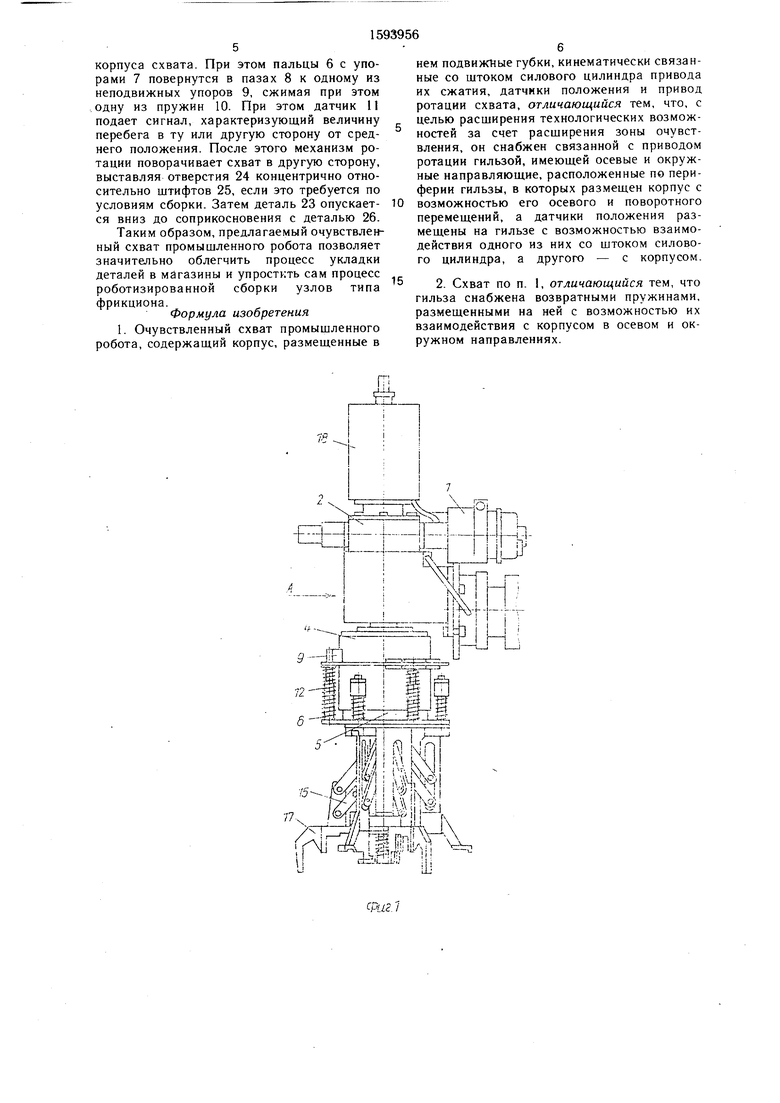
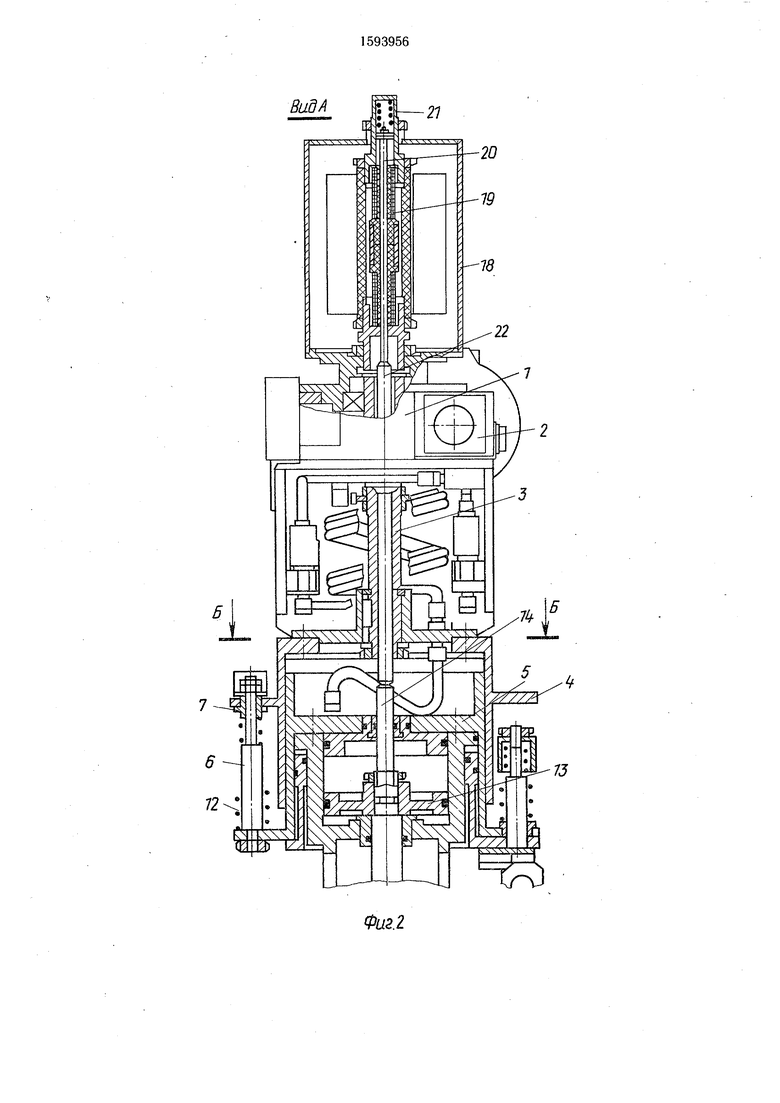
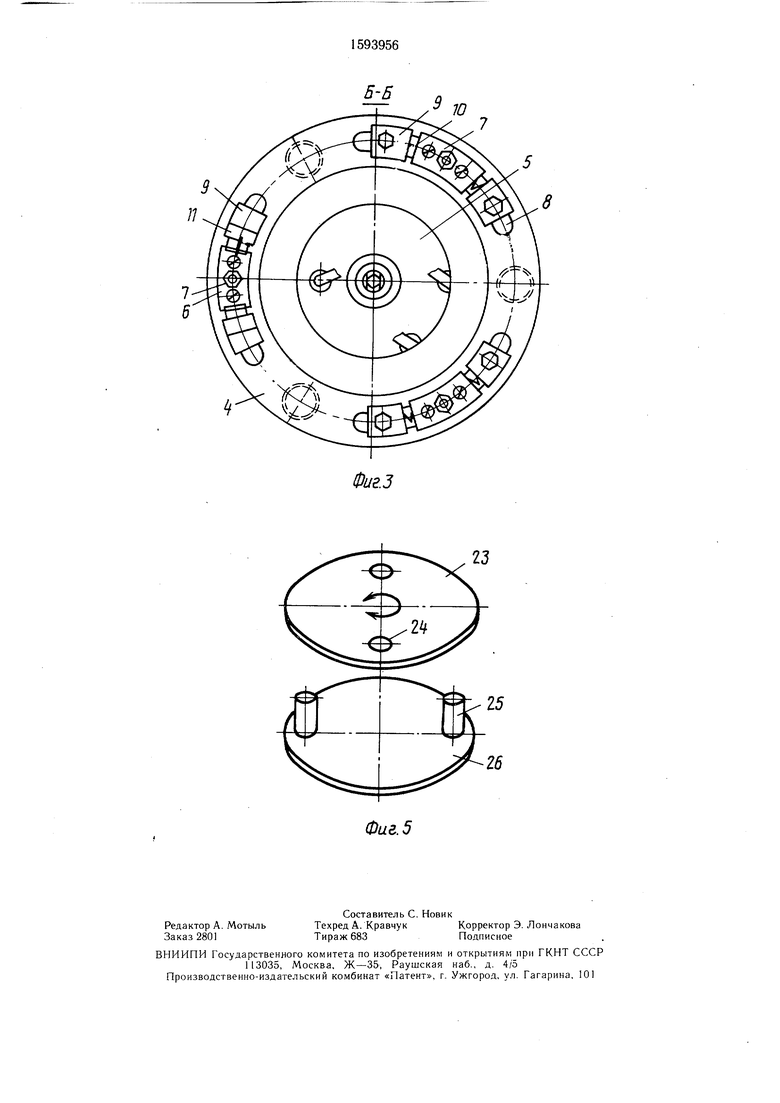
На фиг. 1 изображен очувствленный схват промышленного робота; на фиг. 2 - вид А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 2; на фиг. 4 - кинематическая схема очувствленного схвата; на фиг. 5 - схема сборки двух неориентированных относительно друг друга деталей.
Очувствленный схват промышленного робота состоит из механизма 1 ротации, имеющего привод 2 и вал 3, на котором крепится гильза 4- В гильзе 4 подвижно установлен корпус 5 схвата.
На корпусе 5 крепятся пальцы 6, которые проходят через осевые направляющие в виде подвижных упоров 7, установленных в окружных направляющих в виде пазов 8 гильзы 4. В пазах 8 гильзы 4 установлены неподвижные упоры 9, на которых закреплены пружины 10 и датчики 11 поворота корпуса 5, взаимодействующие с упорами 7. На пальцах 6 установлены пружины 12. В корпусе 5 размещен силовой цилиндр, имеющий поршень 13 и шток 14, который через рычажные звенья 15 и 16 соединен с губками 17. На механизме 1 ротации установлен датчик 18 положения, внутри неподвижного элемента 19 которого размещен его подвижный элемент 20, связанный с пружиной 21. Между щтоком 14 и подвижным элементом 20 внутри вала 3 установлен промежуточный стержень 22. Губки 17 удерживают предназначенную для сборки деталь 23, в которой имеются, например, два диаметрально расположенных отверстия 24. Деталь 23 установлена своими отверстиями 24 на щтифты 25 детали 26.
Очувствленный схват работает следующим образом.
Сжатый воздух поступает в подпорн;не- вую полость силового цилиндра, поршень 13 и шток 14 которого идут вверх. От щтока 14. через рычаги 15 и 16 движение передается на губки 17, которые зажимают деталь 23. Шток 14 через промежуточный стержень 22 перемещают подвижный элемент 20 датчика 18 относительно неподвижного элемента 19. Как только губки 17 зажмут деталь 23, то движение поршня 13, штока 14, промежуточного стержня 22 и подвижного элемента 20 прекратится и с датчика 18 положения можно снять сигнал, характеризующий расстояние между пальцами, которое равно диаметру зажатой детали. Этот сигнал можно сравнить с сигналом, характеризующим размер диаметра эталонной детали, который записан в памяти системы управления промышленным роботом. Таким образом
0
5
можно определить отклонение размера детали от эталонного размера. Если при переносе детали промышленным роботом она будет утеряна по каким либо причинам, то поршень займет другое положение, что не- медленно зафиксирует датчик 18 положения, и система управления (не показана) выдает соответствующий управляющий сигнал.
При движении схвата к детали 23 сверху в нее упираются губки 17, которые находятся в разжатом состоянии и останавливаются вместе с корпусом 5, поршнем 13 и щтоком 14. При дальнейшем движении схвата вместе с механизмом 1 ротации и гильзой 4 перемещается вниз датчик 18, фиксирующий момент контакта и выдающий соответствующий сигнал положения, который сравнивается с координатами положения данной детали, записанными в памяти системы управления.
Таким образом, если берет детали из сто- 0 пы, находящейся в магазине (не показан), то он всегда знает какую деталь по счету от основания стопы он берет и останавливается после выбора всей стопы. После взятия детали 23 губками 17 шток 14 и подвижный элемент 20 переместятся вверх, с датчика 18 можно снять сигнал о взятии детали и о ее размере. При отходе робота от стопы или основания магазина корпус 5 схвата под воздействием нружин 12 и под действием собственного веса с взятой деталью опускается вниз относительно гильзы 4. Подвижный элемент 20 опускается также вниз и занимает определенное положение, соответствующее расстоянию между пальцами, в зависимости .от того, удерживают они детали или нет.
5
0
5
0
Детали 23 могут находиться в магазине в неориентированном положении своими отверстиями 24 относительно штифтов 25 детали 26, находящейся на месте сборки. Поэтому, когда робот переносит деталь 23 к детали 26 и опускает ее на деталь 25 сверху, то он может и не попасть отверстиями 24 на штифты 25, но при этом фиксирует момент контакта детали 23 с штифтами 25. При этом от величины опускания вниз, фиксируемой датчиком 18, за счет сжатия пружин 12 можно всегда получить требуемую силу прижатия детали 23 к штифтам 25. После этого механизм 1 ротации осуществляет поворот детали 23 в ту или другую сторону. При повороте детали 23 относительно детали 26, закрепленной на месте сборки, g отверстия 24 устанавливаются над штифтами 25. Пружины 12 опускают корпус схвата с деталью 23 относительно гильзы 4. Штифты 25 входят в отверстия 24 на величину предварительного поджатия детали 23 к штифтам 25. Этот момент фиксируется датчиком 18 и дается команда на остановку детали 23. Если случился перебег вращения, то пальцы упрутся в стенку отверстия 24 и корпус схвата застопорится, а гильза 4 повернется относительно
5
корпуса схвата. При этом пальцы 6 с упорами 7 повернутся в пазах 8 к одному из неподвижных упоров 9, сжимая при этом одну из пружин 10. При этом датчик 11 подает сигнал, характеризующий величину перебега в ту или другую сторону от среднего положения. После этого механизм ротации поворачивает схват в другую сторону, выставляя отверстия 24 концентрично относительно штифтов 25, если это требуется по условиям сборки. Затем деталь 23 опускается вниз до соприкосновения с деталью 26. Таким образом, предлагаемый очувствлен- ный схват промышленного робота позволяет значительно облегчить процесс укладки деталей в магазины и упростить сам процесс роботизированной сборки узлов типа
фрикциона.
Формула изобретения
1. Очувствленный схват промышленного робота, содержащий корпус, размещенные в
нем подвижные губки, кинематически связанные со щтоком силового цилиндра привода их сжатия, датчики положения и привод ротации схвата, отличающийся тем, что, с целью расширения технологических возможностей за счет расширения зоны очувствления, он снабжен связанной с приводом ротации гильзой, имеющей осевые и окружные направляющие, расположенные по периферии гильзы, в которых размещен корпус с
возможностью его осевого и поворотного перемещений, а датчики положения размещены на гильзе с возможностью взаимодействия одного из них со штоком силового цилиндра, а другого - с корпусом.
2. Схват по п. 1, отличающийся тем, что гильза снабжена возвратными пружинами, размещенными на ней с возможностью их взаимодействия с корпусом в осевом и окружном направлениях.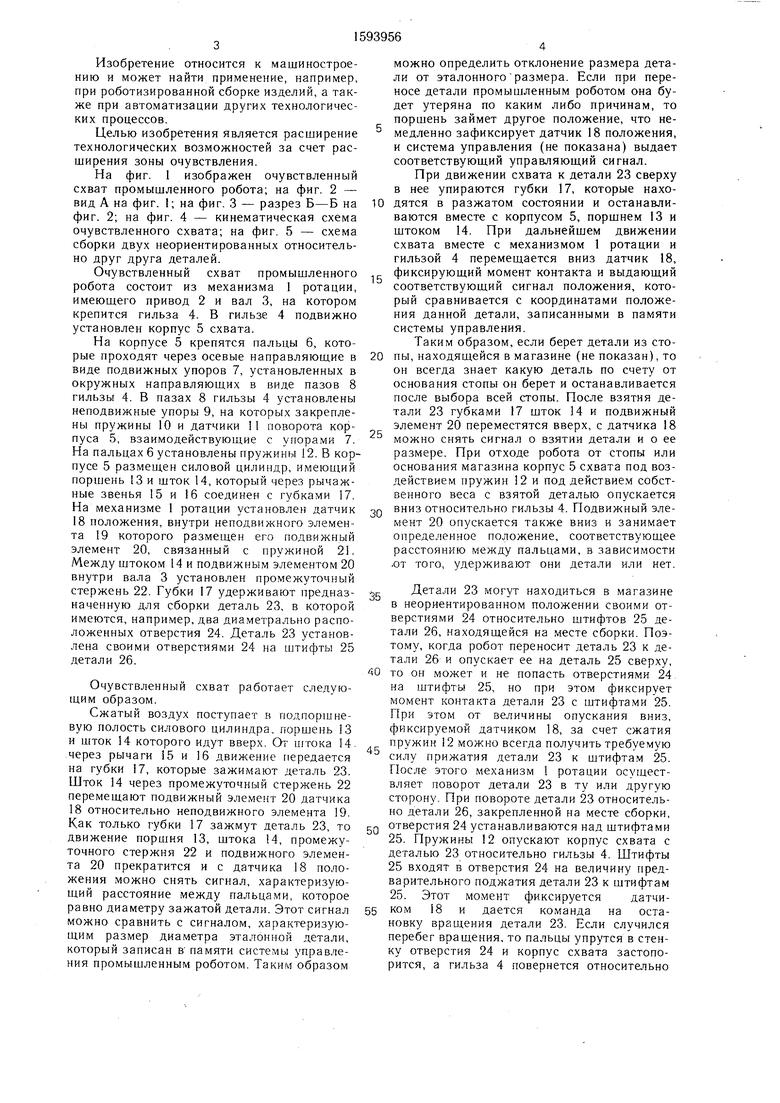
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления схватом манипулятора | 1987 |
|
SU1442395A2 |
| Устройство для перемещения заготовок | 1986 |
|
SU1400732A1 |
| Робототехнологический комплекс для сборки | 1990 |
|
SU1782203A3 |
| Робототехнологический комплекс | 1985 |
|
SU1271742A1 |
| Очувствленный схват робота | 1986 |
|
SU1366392A1 |
| Рука манипулятора | 1985 |
|
SU1311929A1 |
| Схват промышленного робота | 1988 |
|
SU1516347A1 |
| Устройство для сборки деталей типа вал-втулка | 1986 |
|
SU1388258A1 |
| Схват промышленного робота | 1980 |
|
SU931467A1 |
| Групповой схват промышленного робота | 1981 |
|
SU975389A1 |
Изобретение относится к машиностроению и может найти применение при роботизированной сборке изделий, а также при автоматизации других технологических процессов. Целью изобретения является расширение технологических возможностей за счет расширения зоны очувствления схвата. При движении схвата к детали 23 сверху разжатые губки 17 упираются в нее и останавливаются вместе с корпусом 5, поршнем 13 и штоком 14. При дальнейшем движении схвата, вместе с механизмом ротации 1 и гильзой 4 перемещается вниз датчик положения 18, контролирующий момент контакта с деталью, для передачи информации о количестве деталей в стопе. Для захвата детали 23 шток 14 перемещается вверх, сжимая губки 17 и, воздействуя на датчик положения 18, дает информацию о диаметре захватываемой детали 23. При повороте схвата механизмом ротации 1 и его опускания на технологические пальцы зажатая деталь 23 поворачивается до совмещения ее отверстий с пальцами. После этого корпус 5 схвата останавливается и при дальнейшем повороте гильзы 4 срабатывает датчик поворота, подающий команду об угловой ориентации детали 23. 1 з.п. ф-лы, 5 ил.
p± 5- -diE L
-p-r -fn I 4.4
i Э i i в
.
6-et
JI J
Brt-J i- J
ri№
:znL.-,4 I i-п : I
ВадА
Фиг.З
23
| Патент США № 4682805, кл | |||
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
