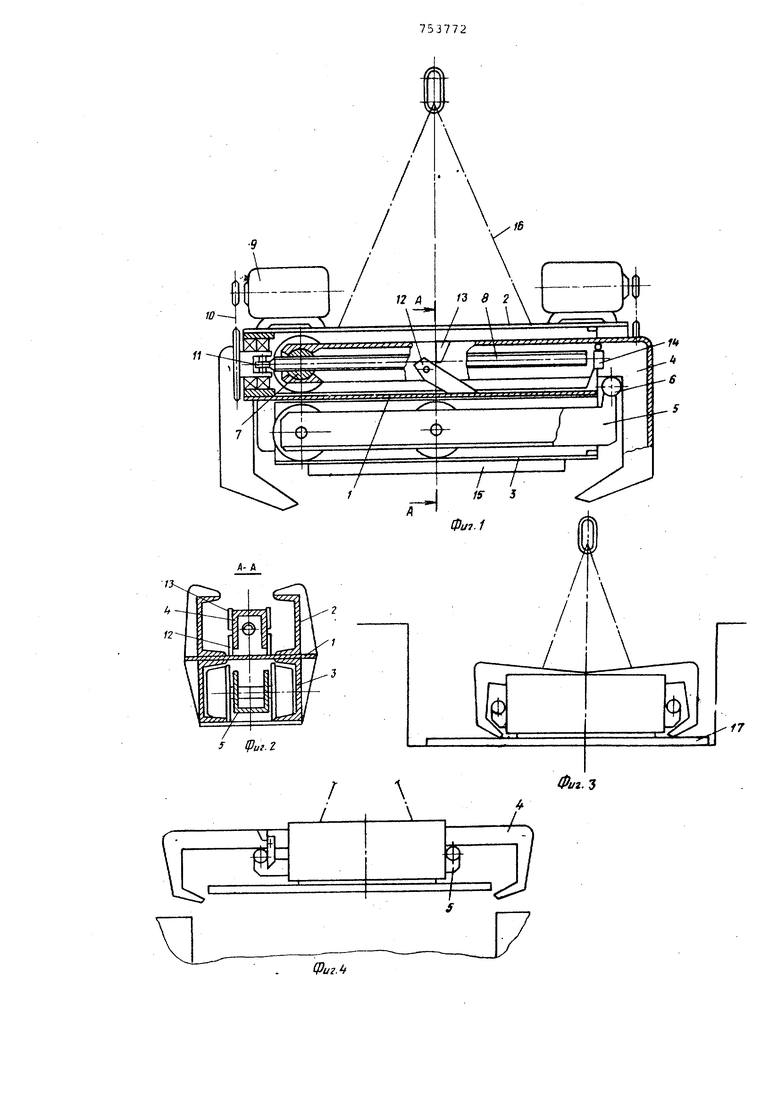
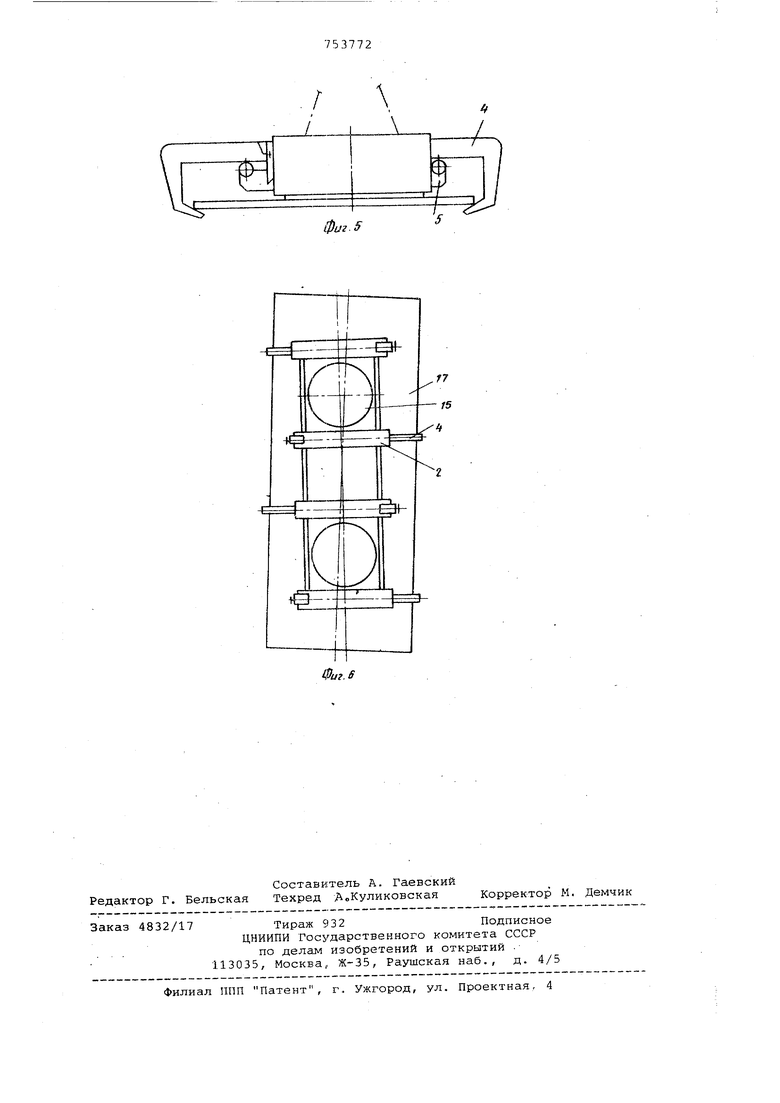
Изобретение относится к механизации погрузочно-разгрузочных, транспортных и складских операций, а имен но к захватам для листовой стали. Известен захват, содержащий закрепленный на корпусе электромагнит и поворотные подхватные лапы 1 . Однако этот захват не обеспечивает подъема и фиксации груза при возможном относительном смещении осей симметрии груза и грузозахватно го устройства, так как грузозахватные органы работают синхронно, имея единый привод, и симметрично оси гру зозахватного устройства, имея неподвижные относительно груза, /в проекции на горизонтальную плоскость, оси поворота подхватных лап. Целью изобретения является повыше ние удобства пользования захватом. Цель достигается тем, что ось поворота каждой лапы установлена на корпусе подвижно в горизонтальной плоскости и снабжена приводом ее перемещения, каждая лапа имеет выдвижную опору, а рабочая поверхность каж дой лапы выполнена наклонной. На фиг. 1 показан предлагаемый за хват; общий вид; на фиг. 2 - разрез А-А фиг. 1; на фиг. 3 - захват в момент фиксации груза электромагнитами; на фиг.. 4 - то же,в момент готовности к дополнительной фиксации груза подхватными лапами; на фиг. 5 - то же, после фиксации груза; на фиг. 6 - вариант компоновки узлов захвата и момент фиксации листов при смещении осей симметрии захвата и груза. На корпусе 1 захвата крепятся верхние 2 и нижние 3 направляющие. В верхних направляющих 2 на роликах с некоторым зазором перемещается поворотная подхватная лапа 4. В нижних направляющих 3 также на роликах перемещается вьщвижная опора 5 с опор- ным роликом 6. На лапе 4 шарнирно закреплена гайка 7, которая, навин- . чиваясь на ходовой винт 8, перемещает лапу. Вращение на ходовой винт 8 передается от электродвигателя 9 через передачу 10 и щарнирную муфту 11.. На боковых поверхностях лапы 4 закреплены на осях собачки 12, скользящие по основанию корпуса 1. В непосредственной близости от ролика 6 собачка 12 опускаетс1Я под действием собственного в щель основания и занимает вертикальное положение. При дальнейшем вьщвижении лапы 4 собачка 12 опирается на ролик 6 и упор 13 и вьщвигает опору 5 из направляющих 3 вслед за лапой.4. На ко пусе 1 с помощью кронштейна закреплен концевой выключатель 14. Включенное положение выключателя 14 соответст-вует такому положению лапы 4, при котором она опирается на ролик 6 под действием собственного веса. То же относится и к парной лапе . К корпусу 1 захвата крепится элек ромагнит 15. Захват подвешивается к траверсе или крюку крана с помощью цепей 16 . Захват работает следующим образом Со сложенными лапами.4 захват опускают краном на лист или пакет листов 17 (фиг. 3) , лежащий вблизи стенок. При этом лапы 4, опираясь на лист 17 и поворачиваясь вокруг гайки 7 (фиг. 1), поднимаются над своими опо рами 5 и размыкают концевые выключатели 14. Включается электромагнит 15 и захваты с грузом выводятся ввегрх или в сторону, если пространство меж ду стенками достаточно для разведения лап 4. Каждая лапа от индив1адуал ного привода выдвигается до тех пор,пока не соскользнет с листа 17 на опору 5 и не замкнет выключатель 14, который отключает привод этой лапы (фиг. .4). В зависимости от точности установки захвата на листах колеблет ся разность хода лап. Как только они заняли горизонтальное положение, включаются одновременно все приводы (вручную или автоматически), и лапы 4 захватывают лист, поджимая его к электромагниту 15 наклонными поверхностями (фиг. 5). Отключение приводов осуществляется автоматически с помощью реле в цепях электродвигателей . После отключения приводов захват готов к транспортированию грузов. Груз можно транспортировать также и с отключенным электромагнитом. В. случае отключения питания электромагнитов подхватные лапы воспринимают всю нагрузку от веса листов без ударных воздействий, так как зазоры между ними и транспортируемыми листами отсутствуют. Индивидуальные приводы лап дают возможность фиксировать лист, приподнятый электромагнитами при наличии смещения осей симметрии листов иэлектромагнитов. Величина возможного смещения зависит от длины подхватных лап. Это свойство облегчает управление захватом. В исходном состоянии захват имеет ширину, меньшую ширины транспортируемых листов, а подхватные лапы не препятствуют захвату электромагнитами груза, лежащего вблизи стенки или стенок. Компактность конструкции и надежность захвата в работе обеспечиваются наличием выдвижных опор. Формула изобретения Захват для листовой стали, содержащий закрепленный на корпусе электромагнит и поворотные подхватные лапы, отличающийся тем, что, с целью повышения удобства пользования, ось поворота каждой лапы установлена на корпусе подвижно в горизонтальной плоскости и снабжена приводом ее перемещения, каждая лапа имеет вьедвижную опору, а рабочая поверхность калодой лапы выполнена наклонной. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 507509, кл, В 66 С 1/06, 1973 (прототип) .
f 

| название | год | авторы | номер документа |
|---|---|---|---|
| Грузозахватное устройство | 1989 |
|
SU1731717A1 |
| Захватное устройство | 1983 |
|
SU1181977A1 |
| Траверса для транспортировки иуКлАдКи лиСТОВыХ издЕлий | 1977 |
|
SU821380A1 |
| Грузозахватное устройство | 1985 |
|
SU1321660A1 |
| Захватно-разделительное устройство | 1981 |
|
SU1000373A1 |
| ЗАХВАТ-КАНТОВАТЕЛЬ ДЛЯ ГРУЗОВ ЦИЛИНДРИЧЕСКОЙ ФОРМЫ С ЦЕНТРАЛЬНЫМ ОТВЕРСТИЕМ | 1994 |
|
RU2116239C1 |
| Грузозахватное устройство | 1989 |
|
SU1691262A1 |
| Грузозахватное устройство | 1986 |
|
SU1440841A1 |
| Захватное устройство для длинномерных грузов | 1981 |
|
SU1071565A1 |
| Грузозахватное устройство | 1989 |
|
SU1675187A1 |
фиг. 5
5
