Изобретение относится к подъемно-транспортному оборудованию, а именно к конструкции захватных устройств для штучных грузов, и может быть использовано при по- грузочно-разгрузочных работах с помощью грузоподъемных механизмов.
Це;1ь изобретения - расширение типоразмеров захватываемых грузов.
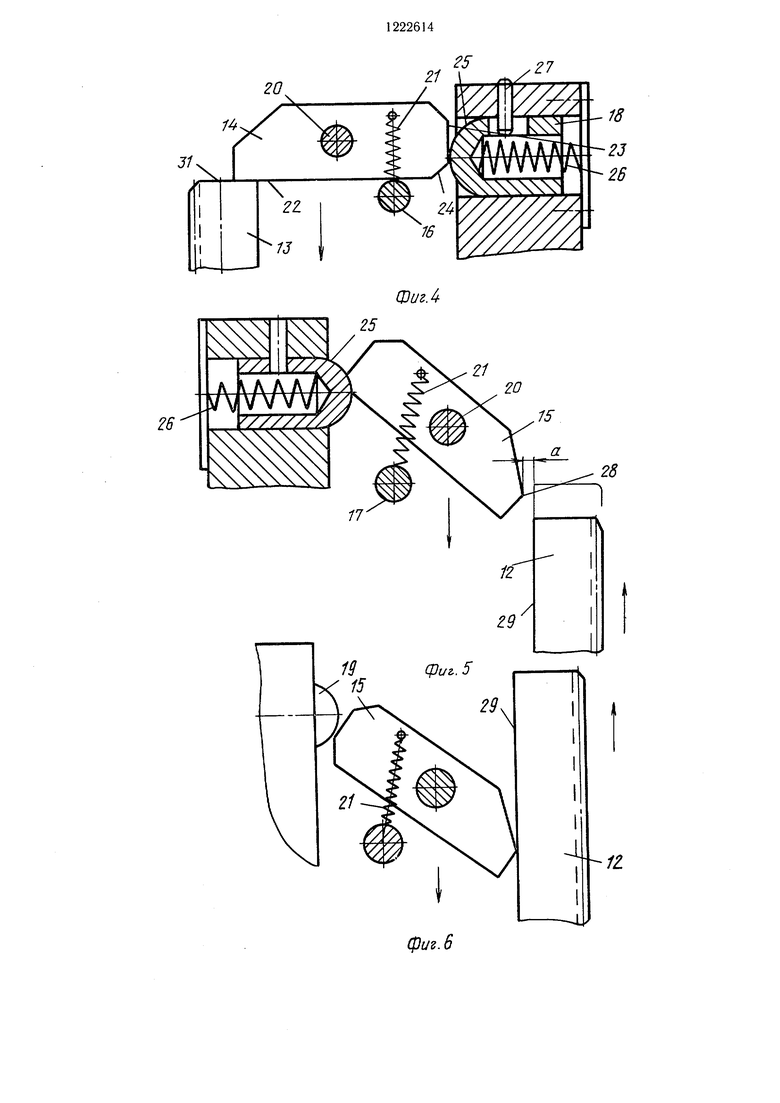
На фиг. схематично изображено захватное устройство, продольный разрез; на фиг. 2 - то же, крайнее нижнее положение при зажиме изделия; на фиг. 3 - разрез А-А на фиг. 1; на фиг. 4 - правая (по чертежу) подпружиненная собачка, контактирующая с зубчатой рейкой и ута11ливаемым упором; на фиг. 5- положение левой (по чертежу) подпружиненной собачки в момент поворота ее утапливаемы / упором; на фиг. 6 - то же, носче прохождении упора; на фиг. 7 - разрез Б-Б на фиг. 1; на фиг. 8 - захватное устройство, крайнее нижнее положение при )азжьме изделия.
Захватное устройство содержит навеши- Г5аемый на грузопод ьемную ..дашину, напри- л ср .манипулятор, корпус i, имеюш.ий продольный паз, и установленный в корпусе i с ьозмо:-кностЕ ю вертикального перемен.ения па его продольному пазу полый опорный элемент 2, снабженный выступами 3 и связанный с подхватными лапами 4 с помощью лередаточного механизма. Последний содержит закрепленные в полости опорного элемента 2 две параллельно расположегшых 0;Ч(г.ч над другим горизонтальных вала 5 и б с закрепленными на пих и1естернямн, две из ко1 орых 7 и 8 pa3Meiii.eHbi па верхнем валу 5, а третья 9 - на нижнем валу 6 и находится в зацеплении с зубьями шестерни 7.
Нижний вал 6 выполнен с разнонаправленной самотормозянхей резьбой на концах, из которую навинчены гайки 10 и П. С зубьями шестерни 8 находятся в зацеплении зубчатые рейки 12 и 13, перемещающиеся в вертикальном направлении.
Передаточный механизм включает в себя также закрепленные в части корпуса 1 неуравмовещенные собачки 14 и 15 и ограничители 16 и 17 их поворота. Собачки 14 и 15 установлены с возможностью нзаимодейетпия с горизонтальными подпружиненными утапливаемыми упорами 18 и 19, которые закреп.лены в верхней части опор- lioro элемента 2. Ка /кдая из собачек 14 и 1,5 г.ыполнека в виде дву лечего рычага, установленного с возможностью поворота на соответствующей цапфе 20, и снабжена пружиной 21, постоянно поджимающей ее рабочую торцовую поверхность 22 к О1 раничителю 6 (17) поворота. Собачки 14 и 15 контактируют по поверхности 23 и поверхности 24 скоса со сферической поверхностью 25 утапливаемого упора 18 (19), ход которого вверх под дeйcтвиe « Г1ружины 26 ограничивает 27.
Другим концом - поверхностью 28 со бачка 14 (15) может контактировать с боковой поверхностью 29 рейки 12 (13), поверхностью 22 - с верхним торцом 30 (31) соответствуюи;ей рейки 12 (13).
Опорный элемент 2 снабжен размещенными параллельно валам 5 и 6 консолями 32, на которых установлены с возможностью возвратно-поступательного перемещения подхватрп:з1е лапы 4, зажи.мные губки которых
0 крепятся к гайкам 10 и 11 и выполнены сменными. В нижней части опорного элемента 2 закреплена сменная опора 33.
Захватное устройство работает следую- щи.м образом.
В исходном положении (фиг. 1) опорный
элемент 2 устройства нахо/тится в крайнем нижнем положении, касаясь опорой 33 наружной поверхности захватываемого изделия - вала 34. При этом зажимные губки подхватных лап 4 разведены в стороны.
Q Для осуществления захвата вала 34 включают привод (не показан) перемещения стрелы 35 грузоподъемной ., ы вниз. Вместе со стрелой 35 перемещается вниз отрюситель- но опорного элемента 2 и жестко связанный со стрелой 35 корпус 1 устройства.
5Опорный элемент 2 в это время опорой 33
упирается в наружную поверхность вала 34. При перемещении вниз корпуса i начинают перемещаться вниз и смонтированные в нем собачки 14 и 15. При этом собачка 14 входит сначала в соприкосновение своей рабочей
поверхностью 22 с верхним торцом 31 рейки 13, находящейся в крайнем верхнем положении, и перемещает ее также вниз (фиг. 2).
Продолжая перемещаться вниз, собачка 14 входит в соприкосновение с упором 18 (фиг. 4). Взаимодействуя своими поверхностями 24 и 23 со сферической поверхностью 25 упора 18, собачка 14 утанливает упор 18 за счет сжатия пружины 26. В результате этого собачка 14, продолжая нажимать на торец 31 рейки 13, проходит
0 упор 18, который под действием той же пружины 26 возвращается, в исходное положение.
Рейка 13, перемещаясь вниз под действием собачки 14, приводит во вращение закрепленную на валу 5 щестерню 8, с которой
5 она находится в зацеплении. В евою очередь, и естерня 8 находится также в зацеплении с рейкой 12, перемещает последнюю в обратную рейке 13 сторону, т. е. вверх. При этом шестерня 7, закрепленная на одном валу 5 с uJecтepнeй 8, также поворачивается и вращает щестерню 9 и вал 6.
При перемещении вниз собачки 14 вместе с пей перемещ.ается и собачка 15 навстречу поднимающейся в этот момент вверх рейке 12. При этом собачка 15, встречаясь вначале
5 с у.чором 19, разворачивается, растягивая при этом пружину 21, которая слабее пружины 26. В результате между поверхностью 28 собачки 15 и боковой поверхностью 29
рейки 12 образуется гарантированный зазор, и рейка 12 таким образом проходит мимо собачки 15. После прохода собачки 15 упора 19 она поджимается своей поверхностью 28 к поверхности 29 рейки 12 и скользит по ней до останова последней.
После захвата вала 34 подхватными лапами 4 прекращается перемещение стрелы 35, так как собачка 14 упирается в остановив- щуюся рейку 8.
Далее включают реверс привода стрелы 35 и последняя начинает перемещаться вверх. Вместе с ней начинает перемещаться вверх и корпус 1 с собачками 14 и 15 относительно опорного элемента 2 до тех пор, пока заплечики корпуса 1 не достигнут выступов 3 опорного элемента 2. После этого корпус 1 и опорный элемент 2 будут перемещаться вверх вместе до останова стрелы 35. Последнюю поворачивают в заданную позицию, а затем включают привод ее перемещения вниз. При этом вал 34 упирается в рабочую поверхность. Корпус 1 продолжает перемещение вниз относительно опорного элемента 2.
Собачка 15 нажимает на торец 30 рейки 12, находящейся в этот момент в крайнем
0
0
5
верхнем положении, и перемещает ее вниз. В свою очередь, рейка 12, перемещаясь вниз, вращает в обратном направлении шестерню 8, которая перемещает рейку 13 вверх, а вал 5 через щестерни 7 и 9 поворачивает в обратном направлении и вал 6.
Гайки 10 и 11 вместе с подхватными лапами 4 расходятся, освобождая от захвата вал 34.
После этого захватное устройство возвращают в исходное положение.
Использование в предлагаемой конструкции захватного устройства в качестве привода подхватных лап перемещение стрелы грузоподъемной мащины, манипулятора, позволяет исключить отдельный привод, что существенно упростит конструкцию захватного устройства, позволит сократить расход металла, стоимость изготовления и энергозатраты. Конструктивное выполнение устройства позволяет расщирить его технологические возможности за счет расширения типоразмеров захватываемых грузов.
Захватное устройство может быть использовано в конструкциях манипуляторов для загрузки и разгрузки технологического оборудования, в частности металлообрабатывающего.
19
Юиг.2.
А-А
J5-
20
CD иг. 421
20
12.
фиг.В
.3
S.3
13
фиг. 7
777/V7// ////777V777777
Фиг.
- Редактор Н. Тупица Заказ 1663/21
Составитель Т Губима
Тсхрел И. ЕересКорректор А. Ференц
Тираж 799Подписное
ВНИИПИ Госуда)ственного комитета СССР
по делам изобретений и открытий
113035, Москва, Ж-35, Раушская наб., д. 4/5
Филиал ППП «Патент, г. Ужгород, ул. Проектная, 4

| название | год | авторы | номер документа |
|---|---|---|---|
| Захват манипулятора | 1976 |
|
SU590238A1 |
| Манипулятор | 1986 |
|
SU1313688A1 |
| Автомат для сборки радиаторов | 1982 |
|
SU1042944A1 |
| Захватное устройство для грузов | 1978 |
|
SU821382A1 |
| Грузозахватное устройство | 1989 |
|
SU1751138A1 |
| Транспортно-технологический ротор | 1988 |
|
SU1586795A1 |
| Захватное устройство | 1983 |
|
SU1181977A1 |
| Устройство для перемещения деталей с рабочей позиции пресса | 1981 |
|
SU967632A1 |
| Устройство автоматической смены инструмента | 1983 |
|
SU1117182A1 |
| Грузозахватное устройство | 1984 |
|
SU1212913A1 |



| Грузозахватное устройство | 1978 |
|
SU664906A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
