(54) ЗАХВАТНОЕ УСТРОЙСТВО ДЛЯ ТРУБ

| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТИЧЕСКИЙ ЗАХВАТ РОДОВИКОВА | 2009 |
|
RU2394747C1 |
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО | 2006 |
|
RU2306253C1 |
| Грузозахватное устройство | 1986 |
|
SU1440841A1 |
| Автоматический захват для штучных грузов | 1981 |
|
SU1013386A1 |
| Грузозахватное устройство | 1982 |
|
SU1066931A1 |
| Грузозахватное устройство длягРузОВ C НЕСущиМ пОяСОМ | 1977 |
|
SU821383A1 |
| Захватное устройство для труб | 1989 |
|
SU1740302A1 |
| МАНИПУЛЯТОР ДЛЯ ТЕПЛОВЫДЕЛЯЮЩИХ СБОРОК ЯДЕРНОГО РЕАКТОРА | 1996 |
|
RU2113343C1 |
| Захватное устройство | 1975 |
|
SU586084A1 |
| Установка для резки плодов на дольки и вырезки сердцевины | 1989 |
|
SU1722403A1 |
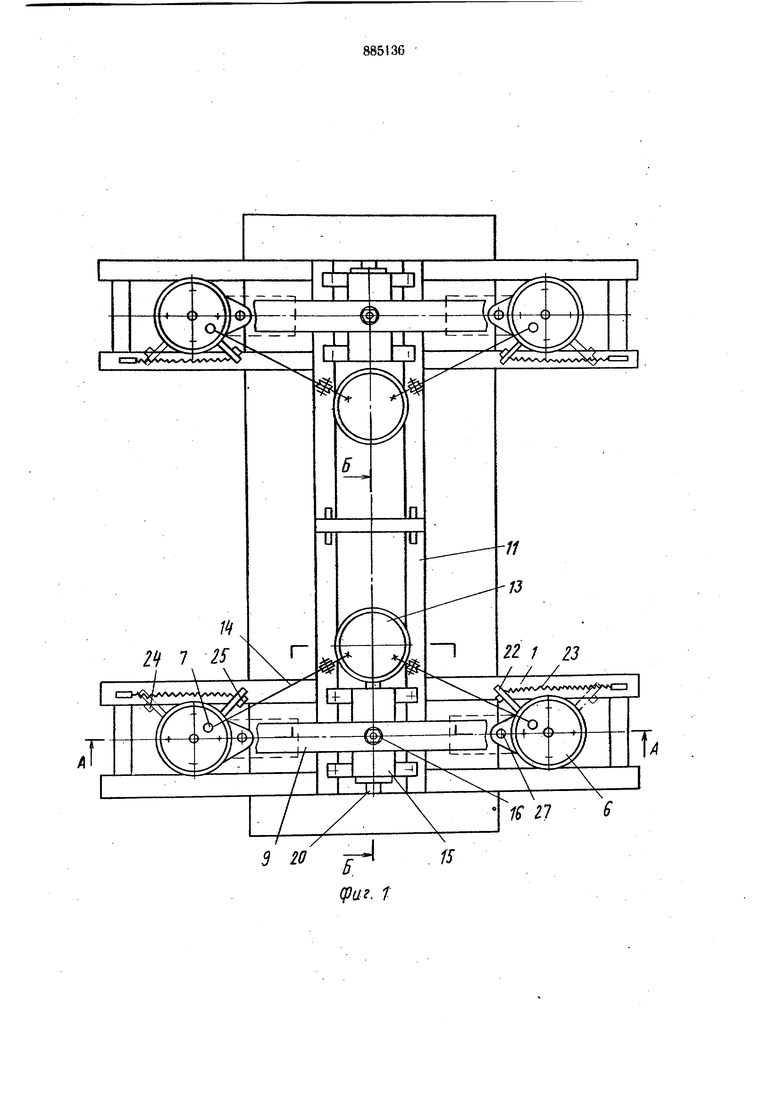
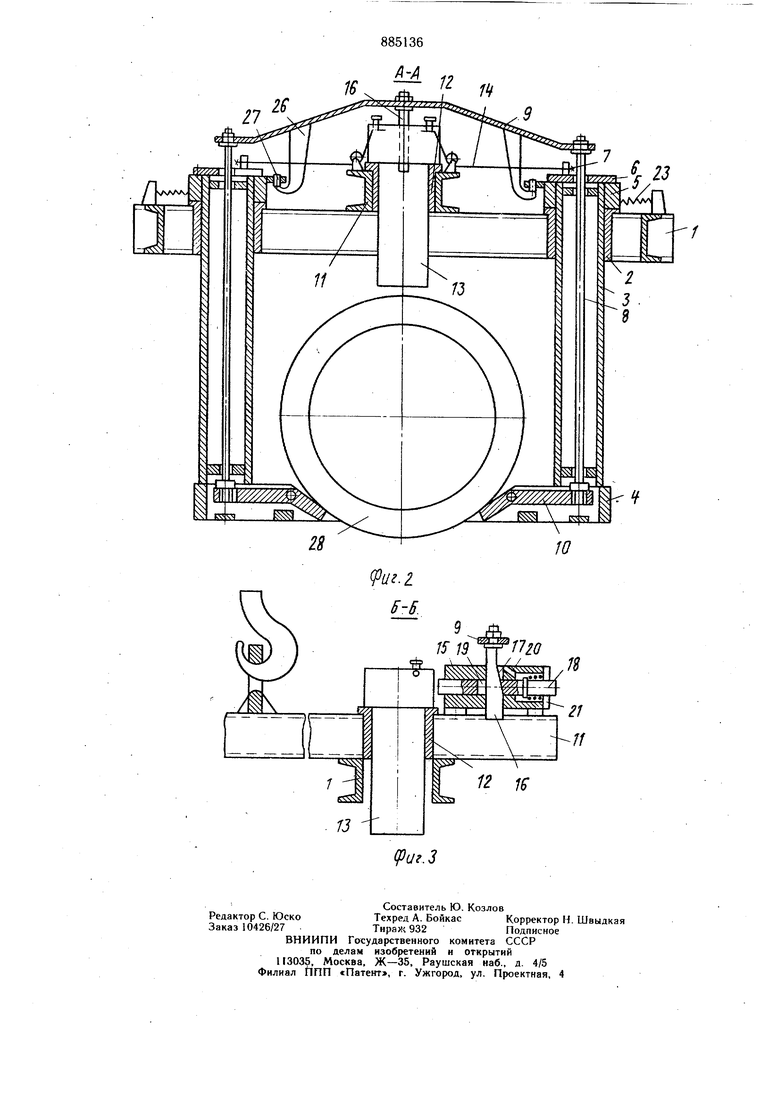
Изобретение относится к грузозахватным устройствам, предназначенным, в частности, для перегрузки труб. Известно захватное устройство для труб, содержащее траверсу, установленные на ней каретки, на каждой из которых закреплены. Г-образные захватные органы, и трособлочный привод перемещения кареток IJ. Однако это устройство предназначено для захвата труб за их торцовые части, что не всегда возможно. Наиболее близким к изобретению по технической сущности является захватное устройство для труб, содержащее несущую раму, установленные иа ней с возможностью поворота вертикальные втулки с закрепленными иа них подхватиыми лапами, размещенные во втулках вертикальные штанги, соединенные между собой траверсами, и механизм управления положением захватных лап 2. Недостатком этого устройства является недостаточно надежный захват и освобождение труб, особеино лежащих без прокладок, так как для захвата и освобождения необходимо опереть устройство о поверхность, на которой лежит груз. Цель изобретения - повышение надежности захвата и освобождения труб, уложенных без прокладок. Поставленная цель достигается тем, что механизм управления выполнен из установленных на раме с возможностью вертикального перемещения упорных штырей с прикрепленными к ним тросами, другие концы которых закреплены на верхних торцах втулок, а на каждой лапе шарнирно установлен двуплечий рычаг, одно из плеч которого связано с вертикальной штангой, причем на каждой траверсе закреплены кронштейны, взаимодействующие с торцами втулок, и вертикальный стержень со скосом, а на установлены подпружиненные фиксаторыположения штырей, взаимодействующие со стержнями. На фиг. I показано устройство, общий вид, в плане; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. Г Захватное устройство содержит несущую раму Ь на которой в подшипниках 2 установлены четыре поворотные втулки 3. К нижнему торцу каждой втулки 3 жестко закреплена подхватная лапа 4. На верхней части втулки 3 жестко прикреплено кольцо
5, снабженное косынкой, в которой имеется отверстие, и торцовая крышка 6, на которой закреплен палец 7. По оси втулки 3 смонтирована вертикальная штанга 8. Штанги 8 попарно соединены своими верхними концами траверсой 9. Нижний конец штанги 8 взаимодействует с плечом рычага 10, шарнирно установленного на лале 4.
Механизм управления положением лап содержит установленные на раме ригели II, на кotopыx в направляющих 12 смонтированы штыри 13 с прикрепленными к ним тросами 14. Другие концы тросов 14 закреплены на пальцах 7 торцовых крышек 6.
В корпусе 15, закрепленЕЮм на ригелях II, установлены вертикальный стержень 16 со скосом 17 и горизонтальный фиксатор 18 с пазом 19, который выполнен со скосом 20. Фиксатор 18 подпружинен пружиной 21, а вертикальный стержень 16 жестко соединен с траверсой 9.
На крышках 6 закреплены стержни 22, соединенные пружинами 23 с рамой К На раме 1 установлены ограничители 24 и 25, ограничиваюшие угол поворота втулок 3 и лап 4. На траверсе 9 закреплен кронштейн 26 со штырем 27. Штырь 13 взаимодействует с захватываемой трубой 28.
Устройство работает следующим образом.При захвате груза устройство опускается на трубу 28 При этом подхватные лапы 4 находятся в исходном положении, при котором они повернуты вдоль продольной оси трубы 28. После того как штыри 13 упрутся в верхнюю часть трубы 28, рама I продолжает опускаться и подпружиненные фиксаторы 18 заходят под борт шты.ря 13, а тросы 14 поворачивают за пальцы 7 поворотные втулки 3 вместе с подхватными лапами 4, которые при соприкосновении стержней 22 с ограничителями 25 устанавливаются перпендикулярно оси трубы 28. При этом штанги 8 находятся в крайнем нижнем положении и рычаги 10 выступают своим плечом, направленным к трубе 28, за габарит подхватной лапы 4.
При подъеме захвата плечи рычагов 10 упираются снизу в тру€у 28, пов(эрачиваются в шарнирах и производят подъем относительно рамы I штанг 8, а вместе с ними траверс 9 с кронштейнами 26 и стержнями 16. При этом штыри 27 кронштейнов 26 входят в отверстия косынок колец 5, фиксируя тем самым положение подхватных лап 4 перпендикулярно оси трубы 28, а стержни 16 отжимают фиксаторы 18, освобождая штыри 13, которые опускаются на направляюш,ие 12, ослабляя тросы 14.
После установки трубы захват продолжают опускать. При этом штыри 27 кронштейнов 26 выходят из отверстий косынок колец 5, а подхватные лапы 4 отходят от
трубы 28, опускаясь ниже нее, и пружины 23 поворачивают за пальцы 7 поворотные втулки 3 вместе с подхватными лапами 4, которые при соприкосновении стержней 22 с ограничителями 25 устанавливаются параллельно оси трубы 28.
Траверса 9 вместе со штангами 8 и стержнями 16 опускается относительно рамы 1. При этом фиксаторы 18 упрутся в штыри 13, а плечи рычагов 10 повернутся и выйдут за габарит подхватных лап 4, после чего захват принимает исходное положение для подъема следуюшей трубы. .
Конструкция предлагаемого захватного устройства позволяет использовать его на всех операциях технологической линни при изготовлении железобетонных труб. Его применение позволяет повысить производительность труда на 4-5%.
Формула изобретения
Захватное устройство для труб, содержащее несущую раму, установленные на ней с возможностью поворота вертикальные втулки с закрепленными на них подхватными лапами, размещенные во втулках вертикальные штанги, соединенные между собой траверсами, и механизм управления положением захватных лап, отличающееся тем, что, с целью повышения надежности захвата и освобождения труб, уложенных без прокладок, механизм управления выполнен из установленных на раме с возможностью вертикального перемещения упорных штырей с прикрепленными к ним тросами, другие концы которых закреплены на верхних торцах втулок, а на каждой лапе шарнирно установлен двуплечий рычаг, одно из плеч которого связано с вертикальной штангой, причем на каждой траверсе закреплены кронштейны взаимодействующие с торцами вертикальных втулок, и вертикальный стержень со скосом, а на раме установлены подпружиненные фиксаторы положения штырей, взаимодействующие со стержнями.
Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР 586084, кл. В 66 С 1/28, 1977.
