Изобретение относится к грузозахватным устройствам и предназначено для перегрузки пакетированных грузов кранами с несущими канатами.
Цель изобретения - повышение надежности и долговечности работы.
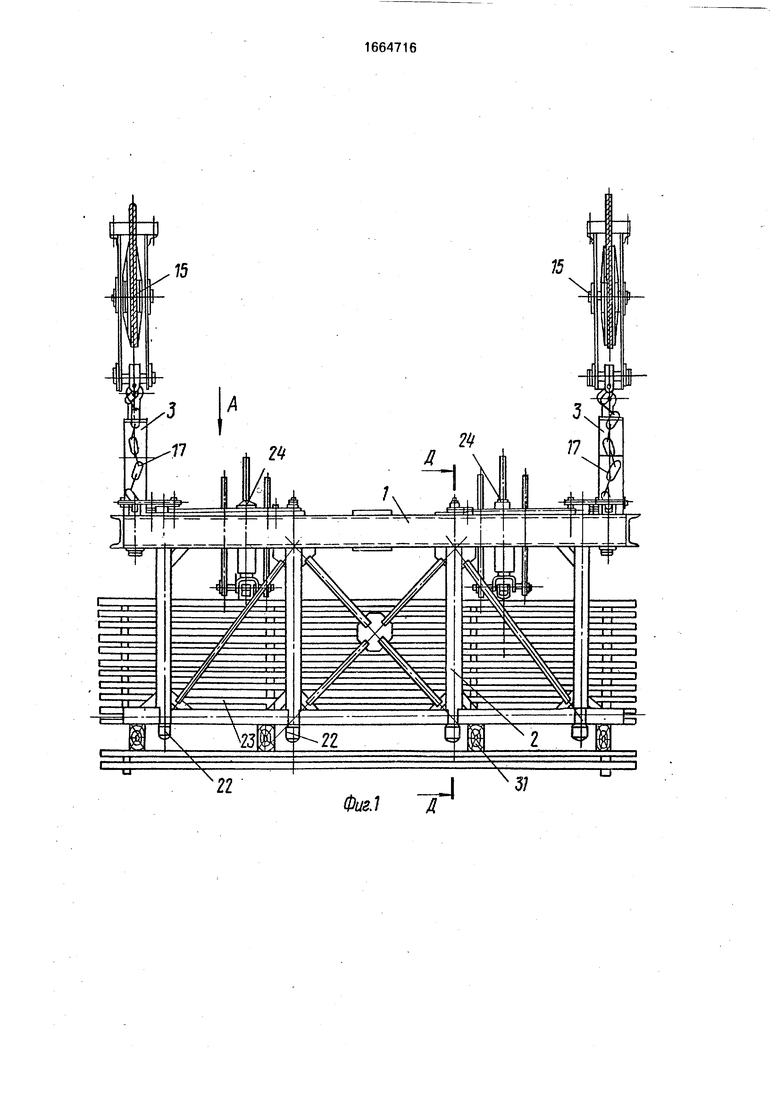
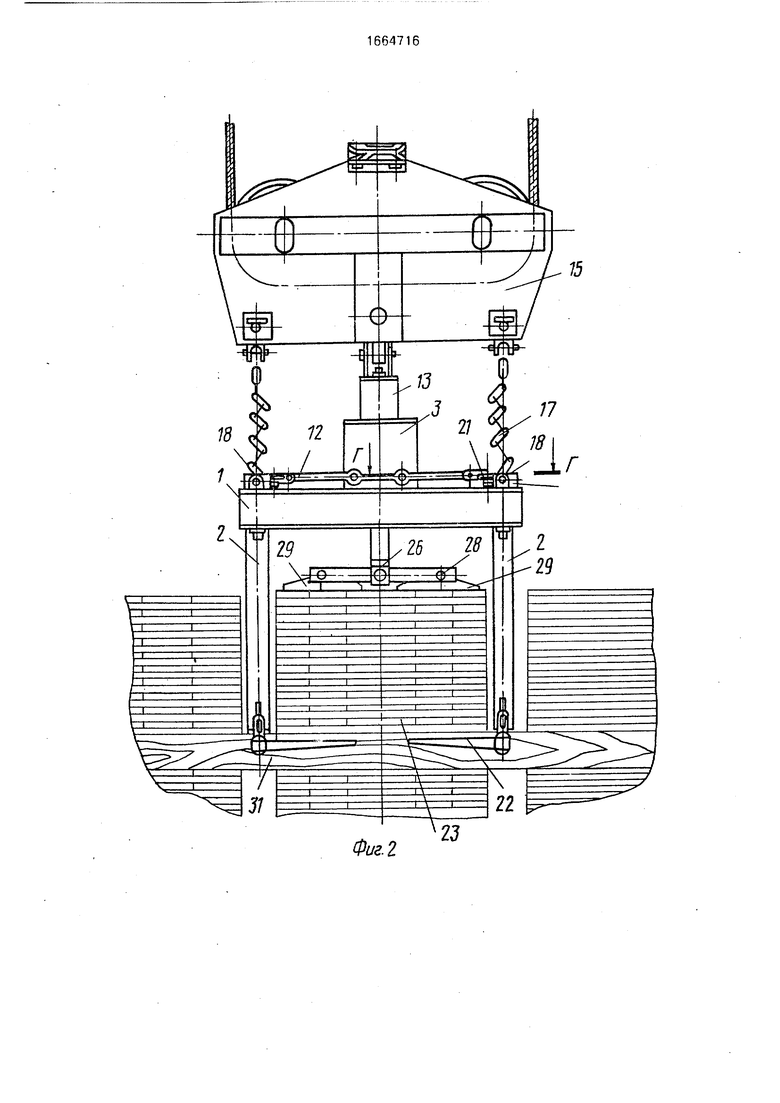
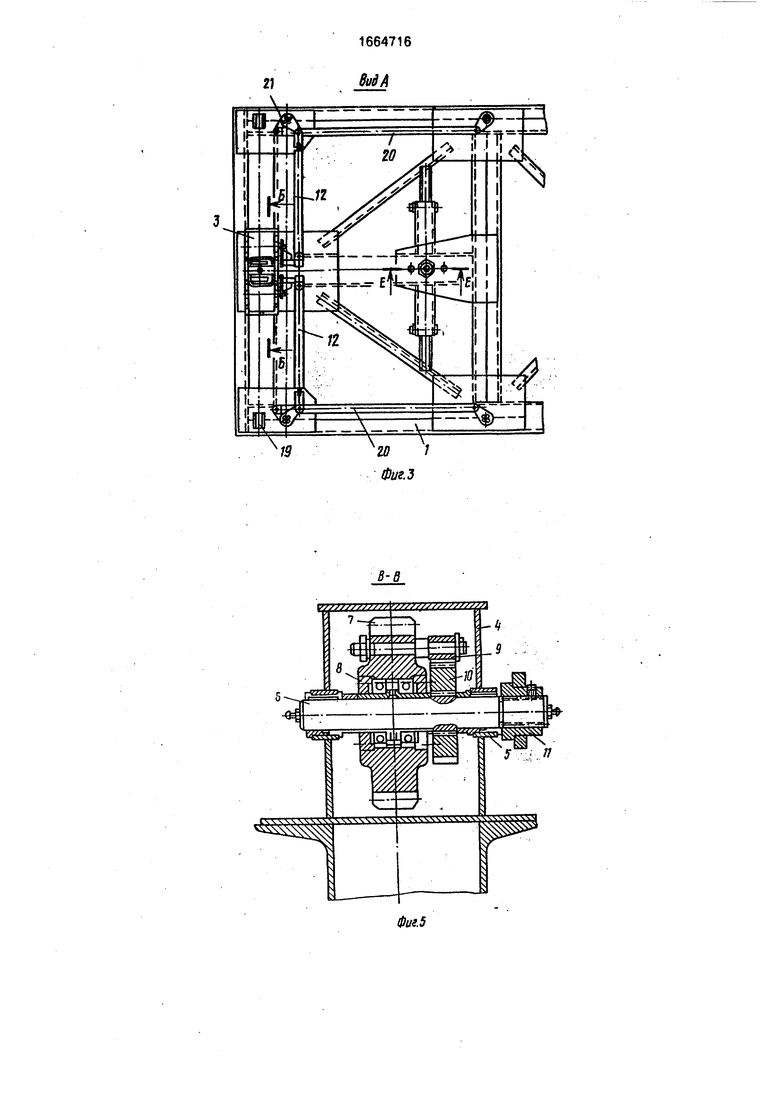
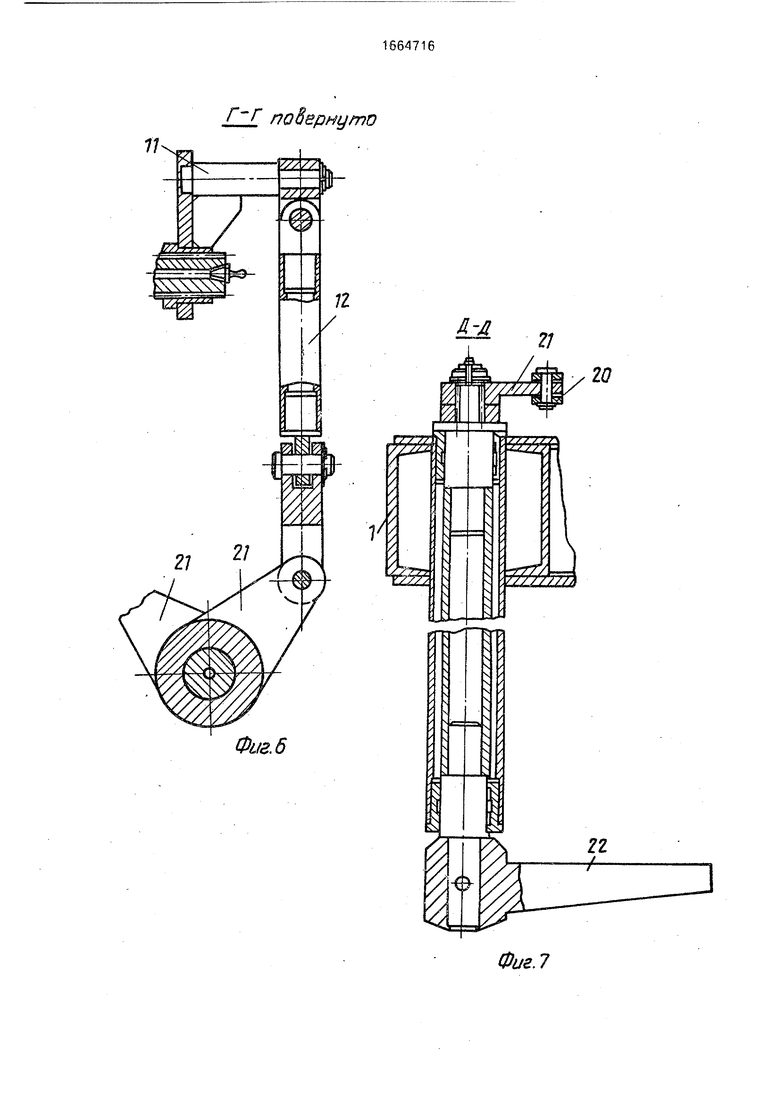
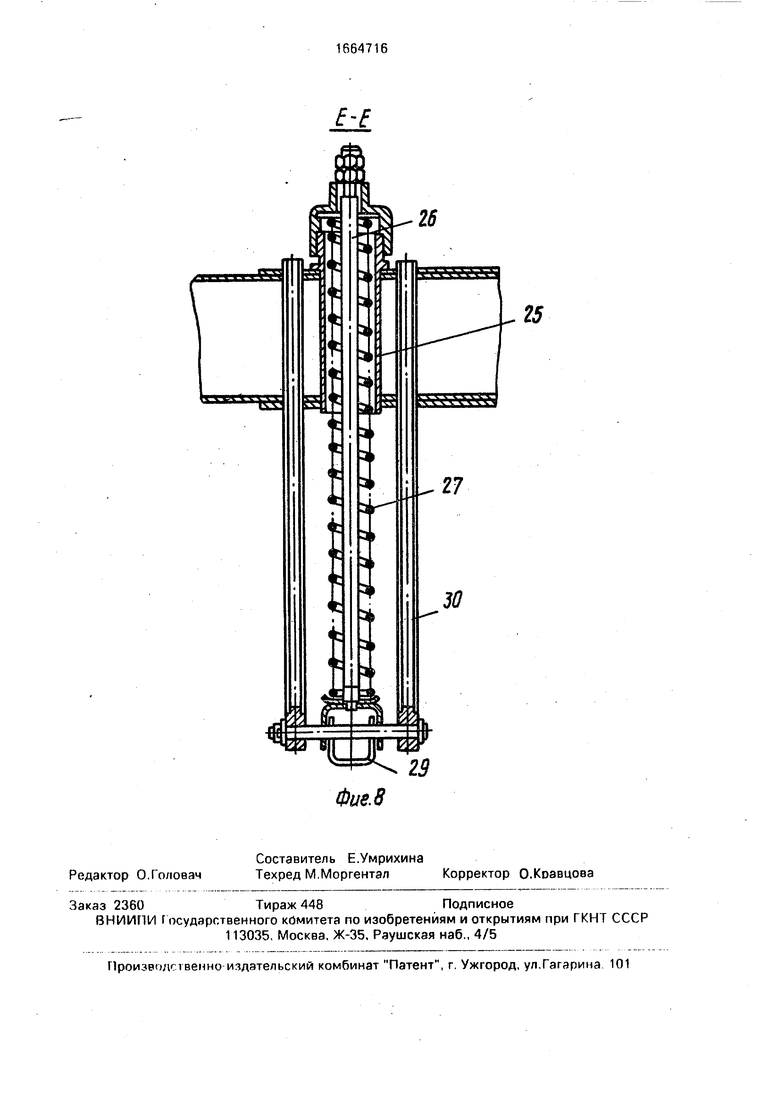
На фиг. 1 изображено грузозахватное устройство, общий вид; на фиг. 2 - то же, вид сбоку; на фиг. 3 - вид А на фиг. 1; на фиг. 4 - разрез Б-Б на фиг. 3;на фиг. 5 - разрез В-В на фиг. 4; на фиг. 6 - разрез Г-Г на фиг, 2; на фиг. 7 - разрез Д-Д на фиг. 1; на фиг. 8 - разрез Е-Е на фиг. 3.
Грузозахватное устройство содержит раму 1 (фиг. 1 и 3), полые стойки 2, связанные между собой горизонтальными и диагональными трубами. На крайних поперечных балках рамы симметрично установлены два механизма поворота лап 3 (фиг. 2 и 3). Механизм состоит из разъемного корпуса 4 (фиг. 4 и 5), в котором на подшипниках 5 скольжения установлены два шлицевых вертикальных вала 6, на каждом из которых свободно посажено зубчатое колесо 7, вращающееся на подшипниках 8 качения. На каждом зубчатом колесе 7 закреплена собачка 9, входящая в зацепление с храповым колесом 10, жестко насаженным на вал 6. На выходящий из корпуса консольный конец вала 6 насажен рычаг 11 (фиг.6), шарнирно соединенный с тягой 12. Зубчатые колеса 7 входят в зацепление с двусторонней зубчатой рейкой 13 (фиг. 4), перемещающейся по шлицевому стержню 14 в вертикальном направлении. В верхней части рейка 13 шар- нирно соединена с грузовой подвеской 15 (фиг. 1 и 2). Движение рейки 13 вниз ограничивается выступами 16, упирающимися в корпус при достижении крайнего нижнего положения. Верхнее положение ограничи
вается длиной цепей 17, закрепленных по углам рамы 1 при помощи осей 18 к проушинам 19(фиг.2).
Каждый механизм поворота лап 3 при
помощи рычагов 11 и 21 и шарнирных тяг 12 и 20 (фиг. 2, 6 и 7), соединен с поворотными лапами 22, Для обеспечения плавной и равномерной без перекосов посадки захвата на пакет 23 (фиг. 1 и 2) пиломатериалов, а
также для прижима пакета с целью предотвращения его перемещения на раме установлены буферно-прижимные устройства 24 (фиг. 1 и 2), представляющие собой цилиндрический корпус 25, закрепленный на
раме 1, в котором перемещается рычажная тяга 26 с надетой на нее цилиндрической пружиной 27 сжатия (фиг.8). Тяга 26 шарнирно соединена с траверсой 28, на концах которой установлены прижимы 29. Рычажная
тяга 26 шарнирно соединена с направляющими стержнямиЗО, верхние концы которых перемещаются в вертикальных отверстиях в раме 1.
Устройство работает следующим образом.
При опускании грузозахватного устройства прижимы 29 буферно-прижим- ных устройств 24 встречаются с верхней плоскостью пакета 23 пиломатериалов,
происходит сжатие пружин 27, которое продолжается до соприкосновения опорных поверхностей стоек 2 с лагами 31. Этим обеспечивается плавная без перекрса посадка грузозахватного устройства. Движение рамы вниз прекращается, но движение подвесок 15 и связанных с ними зубчатых реек 13 продолжается до тех пор, пока не достигается крайнее нижнее положение, при котором выступы 16 упираются в корпус 4 механизма поворота лап 3. Цепи. 17, связывающие подвески 15 с рамой 1, ослабевают.
При движении рейки 13 вниз зубчатые колеса 7 с собачками 9 вращаются в таких направлениях, что собачки 9 не входят в зацепление с храповиками 10. Вращение колес 7 на валы 6 не передается, и лапы 22 остаются в исходном положении параллельно боковой поверхности штабеля.
Из этого положения при подъеме грузозахватного устройства подвески 15 и связанные с ними зубчатые рейки 13 начинают движение вверх и приводят во вращение зубчатые колеса 7, при этом собачки 9 входят в зацепление с храповыми колесами 10, которые передают вращение валам 6, которые, в свою очередь, при помощи рычагов 11 и 21 и шарнирных тяг 12 и 20 поворачивают лапы 22 на 90°, при этом зубчатые рейки 13 достигают своего крайнего верхнего положения, цепи 17 натягиваются и нагрузка передается на них. При разгрузке захвата и укладке пакета 23 в штабель грузозахватное устройство опускают на лаги 30. Подвески 15 вместе с зубчатыми рейками 13 опускаются, зубчатые колеса 7 вращаются в таких направлениях, что собачки 9 не входят в зацепление с храповиками 10, вращение на валы 6 не передается, и лапы 22 остаются под пакетом 23.
Осуществляется подъем захвата. Работа механизма поворота лап 3 происходит аналогично описанному при загрузке захвата пакетом 23,
Лапы 22 повернутся на 90° и захват готов к загрузке другим пакетом.
Формула изобретения
Грузозахватное устройство для пакетированных грузов, содержащее грузовую
подвеску, связанную с ней раму, имеющую полые стойки, в которых расположены вертикальные валы с жестко закрепленными на нижних концах подхвэтными лапами, механизм поворота последних, включающий
в себя жестко закрепленные на верхних концах валов ориентированные горизонтально рычаги, с которыми посредством вертикальных осей шарнирно соединены одними концами тяги, другие концы которых посредством управляющего механизма связаны с грузовой подвеской, отличающееся тем, что, с целью повышения надежности и долговечности работы, управляющий механизм представляет собой вертикально ориентированную, закрепленную одним концом на грузовой подвеске двустороннюю зубчатую рейку и находящиеся в зацеплении с ней размещенные в вертикальной плоскости с двух сторон от рейки
зубчатые колеса, свободно установленные каждое на соответствующем горизонтальном валу, несущем храповое колесо, собачка которого закреплена на соответствующем зубчатом колесе, при этом
на одном из концов каждого горизонтального вала жестко закреплен ориентированный перпендикулярно ему рычаг, конец которого соединен с упомянутым вторым концом соответствующей тяги, выполненной
по крайней мере из двух, шарнирно сочлененных участков.
V 1Щ
| название | год | авторы | номер документа |
|---|---|---|---|
| Захватное устройство | 1983 |
|
SU1181977A1 |
| Грузозахватное устройство | 1989 |
|
SU1751138A1 |
| Грузозахватное устройство | 1982 |
|
SU1066931A1 |
| Магнитное грузозахватное устройство | 1989 |
|
SU1763341A1 |
| Автоматический захват | 1971 |
|
SU537020A1 |
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО | 2006 |
|
RU2306253C1 |
| Грузозахватное устройство | 1990 |
|
SU1735195A1 |
| Грузозахватное устройство | 1986 |
|
SU1440841A1 |
| Грузопассажирский строительный подъемник | 1976 |
|
SU618337A1 |
| Грузозахватное устройство | 1988 |
|
SU1652277A1 |
Изобретение относится к грузозахватным устройствам и предназначено для перегрузки пакетированных грузов кранами с несущими канатами. Цель изобретения - повышение надежности и долговечности устройства в работе. Устройство содержит грузовую подвеску, связанную с ней раму, имеющую полые стойки, в которых размещены вертикальные валы с подхватными лапами на концах, и механизм поворота последних. Механизм поворота лап включает жестко закрепленные на верхних концах валов горизонтальные рычаги, с которыми шарнирно соединены одними своими концами тяги, другие концы которых посредством управляющего механизма связаны с грузовой подвеской. Управляющий механизм представляет собой вертикальную двустороннюю зубчатую рейку 13, находящуюся в зацеплении с зубчатыми колесами 7, установленными свободно на валах 6. На валу 6 жестко закреплено храповое колесо 10, взаимодействующее с закрепленной на зубчатом колесе 7 собачкой 9. При движении рейки 13 вниз зубчатые колеса 7 с собачками 9 вращаются так, что собачки 9 не входят в зацепление с храповыми колесами 10. Вращение колес 7 на валы 6 не передается и подхватные лапы остаются в исходном положении параллельно боковой поверхности штабеля. При подъеме устройства грузовые подвески и связанные с ними зубчатые рейки 13 начинают движение вверх и приводят во вращение зубчатые колеса 7, при этом собачки 9 входят в зацепление с храповыми колесами 10, которые передают вращение валам 6, которые в свою очередь при помощи рычагов и шарнирных тяг поворачивают лапы на 90°, заведя их под пакет. 8 ил.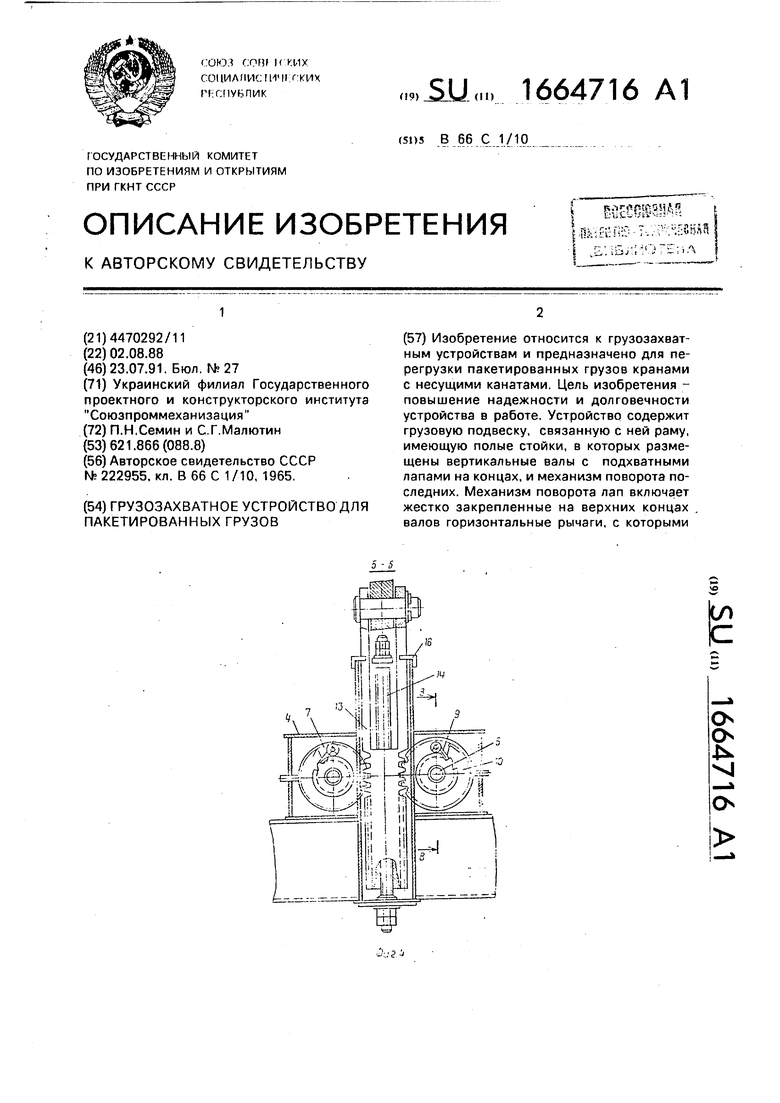
9Ufr99l
Фиг. 2
9Ufr99t
поВернуто
Фиг.7
29
25
29
| УСТРОЙСТВО ДЛЯ ЗАХВАТА ПАКЕТА ПИЛОМАТЕРИАЛОВ | 1965 |
|
SU222955A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
