00
оо 00 ;о ел
Изобретение относится к машиностроению, а именно к конструкции прессов.
Целью изобретения является повышение КПД пресса.
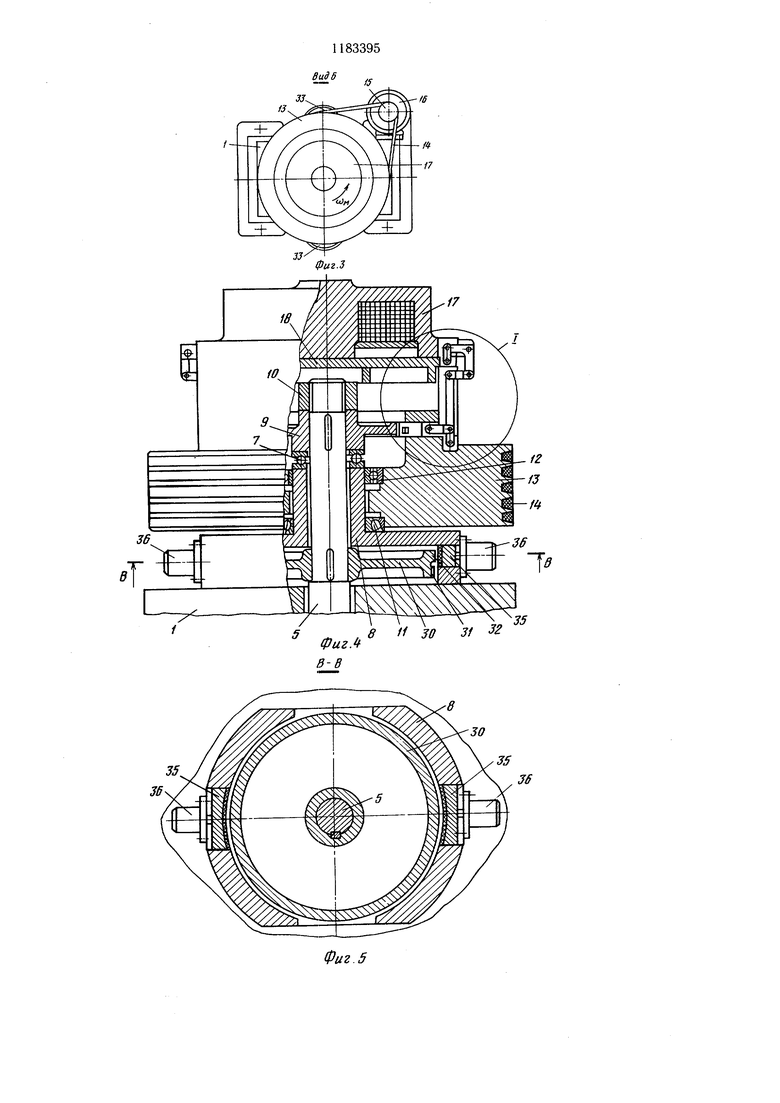
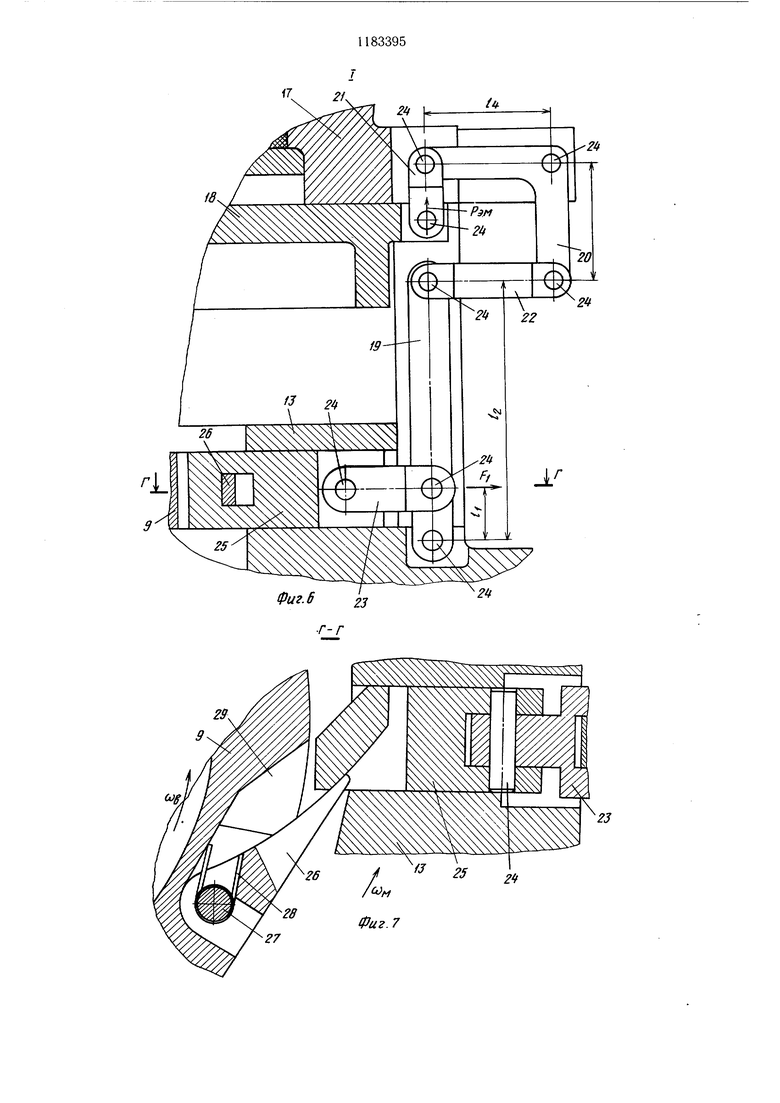
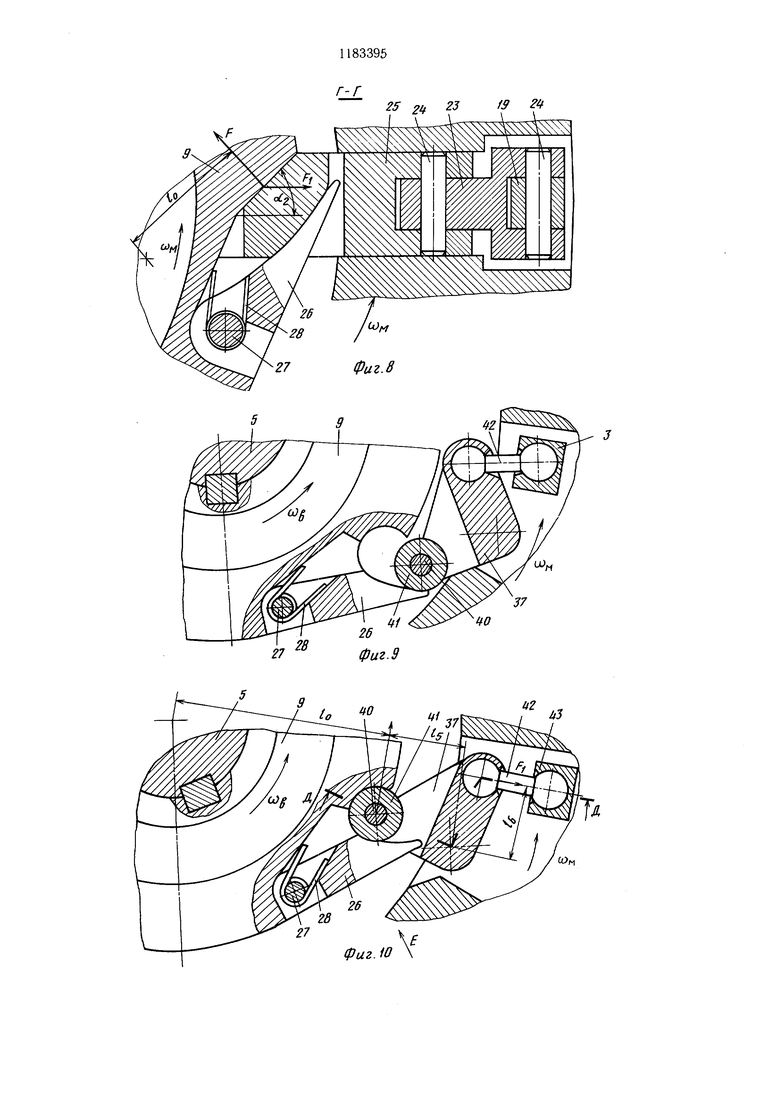
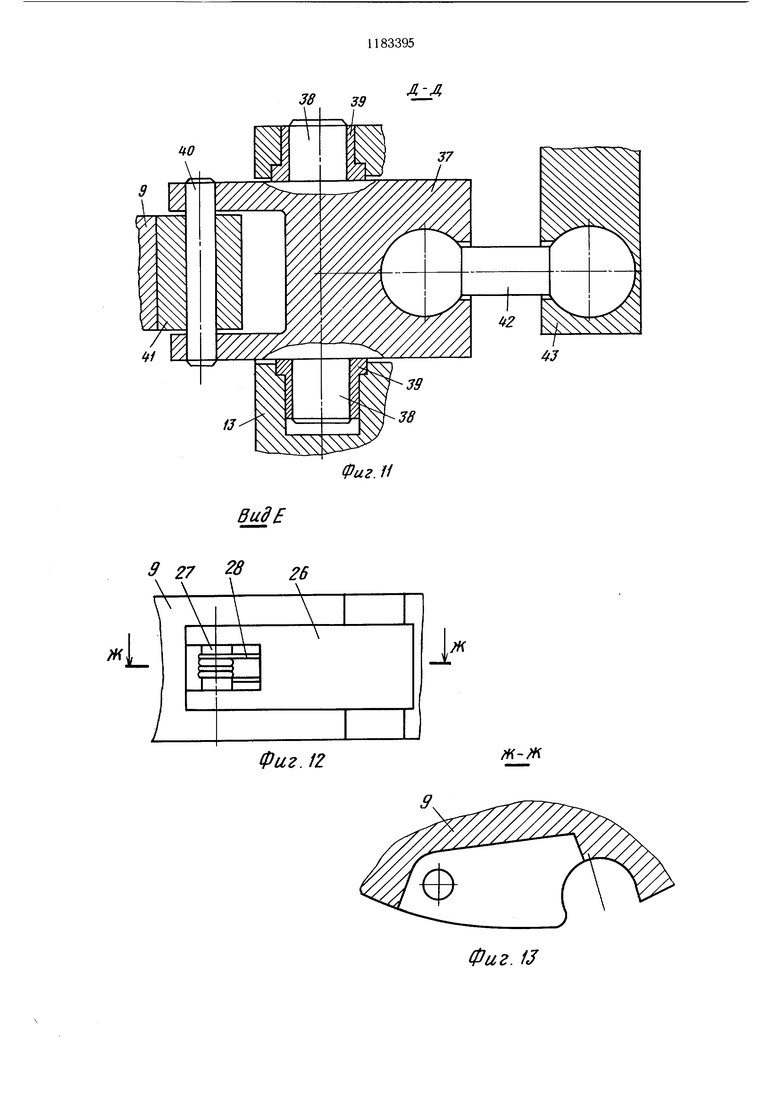
На фиг. 1 изображен пресс, частичный разрез; на фиг. 2 - вид А на фиг. 1; на фиг. 3 - вид Б на фиг. 1; на фиг. 4 - маховик с механизмом связи диска с якорем и тормозом; на фиг. 5 - разрез В-В на фиг. 4; на фиг. 6 - узел I на фиг. 4; на фиг. 7 - разрез Г-Г на фиг. 6 (в момент захода кулаЧка на копир); на фиг. 8 - разрез Г-Г на фиг. 6 (в момент захода кулачка в паз диска); на фиг. 9 - поворотньу кулачок в момент захода кулачка на копир, вариант исполнения; на фиг. 10 - то же, в 1уомент захода кулачка в паз диска; ча фиг. 11 - разрез Д-Д на фиг. 10; на фиг. 12 - вид Е на фиг. 10; на фиг. 13 - сечение Ж-Ж на фиг. 12; на фиг. 14 - вариант системы двуплечих рычагов.
Винтовой пресс содержит станину 1, в направляющих 2 которой установлен ползун 3, Ъ котором установлена гайка 4, сопряженная с винтом 5. Винт 5 установлен подвижно в подпятнике 6 и подшипнике 7 на станине 1 пресса.
Подшипник 7 установлен на станине на втулке 8, которая жестко связана со станиной 1. На верхней части винта 5 закреплен диск 9, который связан с винтом 5, например, шпоночным соединением и поджат гайкой 10.
На втулке 8 на подшипниках 11 и 12 смонтирован маховик 13, который клиноременной передачей 14 связан со шкивом 15 электродвигателя 16, установленного на станине 1.
На маховике 13 установлен электромагнит 17 с якорем 18 и механизм связи диска 9 с якорем 18, состоящий из двух двуплечих рычагов 19 и 20 и тяг 21-23, установленных подвижно на осях 24. В маховике 13 установлены кулачки 25 (показан один кулачок), имеющие возможность радиального перемещения относительно маховика 13.
На диске 9 установлены копиры 26 на осях 27 и подпружинены пружинами 28. Для этого в диске 9 выполнены пазы 29. На винте 5 закреплен также барабан 30, который имеет зубчатый венец 31 и цилиндрический участок 32. Барабан 30 связан через шестерни 33 с электродвигателями 34, установленными на станине 1 пресса.
В корпусе втулки 8 смонтирован тормоз в виде тормозных колодок 35, связанных с цилиндрами 36.
На фиг. 9-14 показан вариант поворотного кулачка. Кулачок 37 установлен на осях 38 во втулках 39 маховика 13. Кулачок 37 представляет собой двуплечий рычаг, на одном плече которого установлен на оси 40 ролик 41, а другое плечо посредством тяги 42 через сферические шарниры соединено
с нижним плечом двуплечего рычага 43, установленного на оси 44 в маховике 13.
Пресс работает следующим образом.
В исходном положении электромагнит 17 отключен. Якорь 18 занимает нижнее положение, а кулачок 25 - крайнее правое положение. Колодки 35 под действием цилиндров 36 подведены к цилиндрическому участку 32 барабана 30. Ползун 3 занимает крайнее верхнее положение. Включается электродвигатель 16, который через ременную передачу 14 разгоняет маховик 13 до заданной угловой скорости.
Маховик 13 запасает кинетическую энергию
т,а,-,ш
где „-момент инерции маховика 13 и других
деталей, связанных с маховиком. Направление вращения tJ маховика 13 показано на фиг. 3, 7-10. Винт 5 и связанный с ним диск 9 неподвижны (Шв 0). Свободное вращение маховика 13 относительно диска 9 обеспечивается за счет отклонения копиров 26 в пазы 29 диска 9 под действием кулачков 25.
Для совершения хода разгона подвижных частей - винта 5 и ползуна 3 колодки 35 под действием цилиндров 36 отводятся от цилиндрического участка 32 барабана 30, тем самым растормаживая винт 5. Включаются электродвигатели 34, которые
0 через шестерни 33 и зубчатый венец 31 барабана 30 разгоняют винт 5. Так как момент инерции винта 5 в десятки раз меньше момента инерции маховика 13, то для разгона винта 5 требуется существенно меньше энергии и меньше установочной мощности электродвигателей 34. Кроме того, разгон винта осуществляется дополнительно моментом в резьбе винт 5 - гайка 4 от веса ползуна 3. Передаточное отношение зубчатой передачи шестерня 33 - зубчатый венец 31 подобрано таким образом, чтобы скорость вращения винта 5 превышала скорость вращения маховика 13.
При скорости вращения винта 5 меньшей, чем скорость вращения о) маховика 13, последний обгоняет винт 5 и кулачки 25 проскальзывают по копирам 26, отклоняя их в пазы 29 диска 9. При дальнейшем возрастании скорости WB винта 5 его скорость достигает скорости маховика и)з Юл, после чего винт 5 начинает обгонять маховик 13.
0 Копиры 26 подходят к кулачкам 25 (на фиг. 7 и 8 показаны по одному копиру и кулачку, которых на диске установлено несколько пар - три, четыре и более в зависимости от передаваемого крутящего момента. Дальнейшее относительное движение
5 диска 9 и маховика 13 обеспечивает заход кулачков 25 по копирам 26 в пазы 29.
Кулачки 25, перемещаясь радиально к центру вращения винта 5 и маховика 13 через тягу 23, поворачивают рычаг 19, который через тягу 22 поворачивает рычаг 20, а он тягой 21 поднимает якорь 18 вверх к нижнему торцу электромагнита 17. В этот момент происходит автоматическое включение электромагнита 17 путем замыкания конечного выключателя при перемещении якоря 18 вверх. Мощность электродвигателей 34 выбирается таким образом, чтобы включение электромагнита 17 осуществлялось до начала хода деформирования. После включения электромагнита 17 электродвигатели 34 отключаются. При включенном электромагните 17 винт 5 и маховик 13 вращаются как одно целое с кинетической энергией Тмв в где 1 4+: -суммарный момент инерции маховика 13, винта 5 и других деталей, связанных с маховиком и винтом. При встрече рабочего инструмента с заготовкой (не показаны) начинается ход деформирования заготовки. Работа деформирования осуществляется за счет накопленной кинетической энергии 1. Электродвигатель 16 на рабочем ходе не отключается и продолжает передавать энергию маховику 13. Во время рабочего хода усилие деформирования возрастает, что приводит к увеличению крутящего момента в винтовой паре винт 5 - гайка 4. Величина крутящего момента в винтовой паре без учета сил трения определяется по зависимости M, P,tgd.) где Р|-усилие деформирования; д-средний диаметр резьбы винтовой пары винт 5 - гайка 4; dt-yron наклона резьбы винта 5. Крутящий момент Mj обеспечивается действием кулачка 25 на скос паза 29 усилием Р{Мц Mi) .(4) При этом кулачок 25 воспринимает усилие F ( oCt- угол скоса кулачка 25), которое через систему рычагов и тяг (фиг. 6) передается на якорь 18 электромагнита 17 с усилием РЭД РЭМ F. F sin c(,i-tf-. tj. ч Т- Таким образом, рещая совместно зависимости (3) - (5), получаем и Е4 Pi RM Di-t, -tgctr smoLj Формула (6) показывает взаимосвязь между конструктивными параметрами пресса, усилием, развиваемым электромагнитом 17, и усилием деформирования. При постоянном значении конструктивного параметра К т 2. i-a Са (-4.-уч DI- dj f} ЬяоС -ЗШЛг усилие деформирования Рд зависит только от усилия Pjj электромагнита 17 Р К-РЭ«.(8) Если настроить электромагнит на заданное усилие РЗМ (настройка осуществляется подачей заданной величины напряжения на клеммы электромагнита), то при усилии деформирования Р КР действие тяг 21 на якорь 18 становится равным усилию электромагнита 17. При дальнейщем росте усилия на ползуне и соответственно на якоре 18 происходит его отрыв от электромагнита 17. Воздействие электромагнита 17 на якорь 18 уменьщается, уменьшаются силы F и Ft. Скорость вращения винта 5 уменьшается, маховик 13 обгоняет винт 5 и диск 9. Кулачки 25 вдвигаются в маховик и опускают через систему рычагов и тяг якорь 18. Электромагнит 17 отключается при срабатывании связанного с ним конечного выключателя. Дальнейшее деформирование поковки до максимального усилия осуществляется кинетической энергией винта 5, диска 9 и ползуна 3. Часть их энергии после окончания хода деформирования расходуется на упругую деформацию пресса и щтампа. Таким образом, деформирование поковки осуществляется кинетической энергией маховика 13, винта 5, диска 9 и ползуна 3 (Aj. А,+Аг). Работа деформирования Aj осуществляется кинетической энергией маховика 13, винта 5, диска 9 и ползуна 3 д лт т й)иа. - 4)fitfQ) А, - д 1э1 - JMB2 где )JB - угловая скорость вращения маховика 13 и винта 5 перед началом хода деформирования; н.ъгГ угловая скорость вращения маховика 13 и винта 5 в мориент отрыва якоря 18 от электромагнита 17. Работа деформирования А г осуществляется кинетической энергией винта 5 диска 9 и ползуна 3: Аг йт„ ав г . гдесоз(х1л -угловая скорость вращения винта 5 в момент отрыва якоря 18 от электромагнита 17; 8 - угловая скорость вращения винта 5 в конце хода деформирования. Работа упругой деформации пресса и щтампа осуществляется оставшейся кинетической энергией винта 5. диска 9 и ползуна 3
А, дТ,з 1в-.
01)
Винт 5 останавливается, а маховик 13 продолжает ускоренно вращаться под дейс вием момента, развиваемого электродвигателем 16.
За время хода деформирования скорость вращения маховика уменьщилась ота; до лег-Скорость вращения электродвигателя 16 также уменьшилась.
Момент инерции 3j рассчитан таким образом, чтобы за ход деформирования скорость вращения электродвигателя 16 при максимальной работе AI деформирования не выходила за пределы установившегося режима работы электродвигателя 16, определяемого величиной критического с,кольжения.
После окончания хода деформирования и остановки винта 5 включается на реверс электродвигатели 34. Под действием крутящего момента от электродвигателей 34, передаваемого через шестерни 33 и зубчатый венец 31, винт 5 ускоренно вращается в противоположную относительно вращения маховика 13 сторону.
Ползун 3 перемещается вверх. При подходе ползуна 3 к крайнему верхнему положению электродвигатели 34 отключаются, включаются цилиндры 36, под действием которых тормозные колодки 35 затормаживают колесо 30 и связанные с ним винт 5 и диск 9. Винт 5 и ползун 3 останавливаются.
За время движения ползуна вверх, за время технологической паузы и части времени хода вниз электродвигатель 16 разгоняет маховик 13 до заданной максимальной скорости, обеспечивая кинетическую энергию, необходимую для деформирования следуюплей заготовки.
Для выполнения следующего хода цикл повторяется.
При установке на прессе поворотного кулачка 37 взаимосвязь между усилием деформирования Р и усилием, развиваемым электромагнитом Р,, определяется зависимостью, .
Р, КгР,к .(
гдеЛэ-конструктивныи параметр, учитывающий также соотношение плеч кулачка 37.
К 2- о ts-i4 Ее
(13)
D, -г, 3 45
При скорости вращения Шь винта 5 меньшей, чем скорость вращения cOji маховика 13, последний обгоняет винт 5 и кулачки 37 проскальзывают по копирам 26. При дальнейщем возрастании скорости w винта его скорость достигает скорости маховика Шв , после чего винт 5 начинает обгонять маховик 13, и копиры 26 подходят к роликам 41. Дальнейшее относительное движение диска 9 и маховика 13 обеспечивает заход роликов 41 по копирам 26 в пазы 29 диска 9 и поворот кулачков 37, которые через тяги 42 поворачивают рычаги 43 и далее через тяги 22, рычаги 20 и тяги 21 поднимают якорь 18 вверх к нижнему тор5 Цу электромагнита 17. В дальнейшем происходит процесс включения электромагнита 17 так же, как при работе пресса с поступательными кулачками 25.
При срабатывании электромагнита 17 кулачки 37 и система рычагов и тяг возвраща0 ются в исходное положение.
Для обеспечения штамповки различных поковок с различными усилиями в конце хода деформирования производства настройка электромагнита 17 на величину усилия РЭ,
5 развиваемого электромагнитом 17. Величина усилия регулируется напряжением, подаваемым на обмотку электромагнита.
Таким образом, настройка пресса на заданную поковку при известном усилии ее деформирования существенно облегчается.
0 Для обеспечения щтамповки с меньшим значением максимального усилия деформирования подается на обмотку электромагнита меньщая величина напряжения, что снижает усилие отрыва якоря от электромагнита и крутящий момент, передаваемый на
5 диск и винт.
При щтамповке больших заготовок напряжение на обмотке увеличивают. Величина напряжения, которая определяется по вольтметру, может быть проградуирована на усилие деформирования с учетом окончательного деформирования заготовки энергией винта 5 диска 9 и ползуна 3 после срабатывания электромагнита.
Наладочный режим на прессе может осуществляться только от электродвигателей 34
5 на ход вниз и вверх. Электромагнит 17 в режиме «Наладка обесточивается с пульта управления.
Экономический эффект при внедрении изобретения получают за счет повышения
Q КПД пресса и снижения установочной мощности двигателей.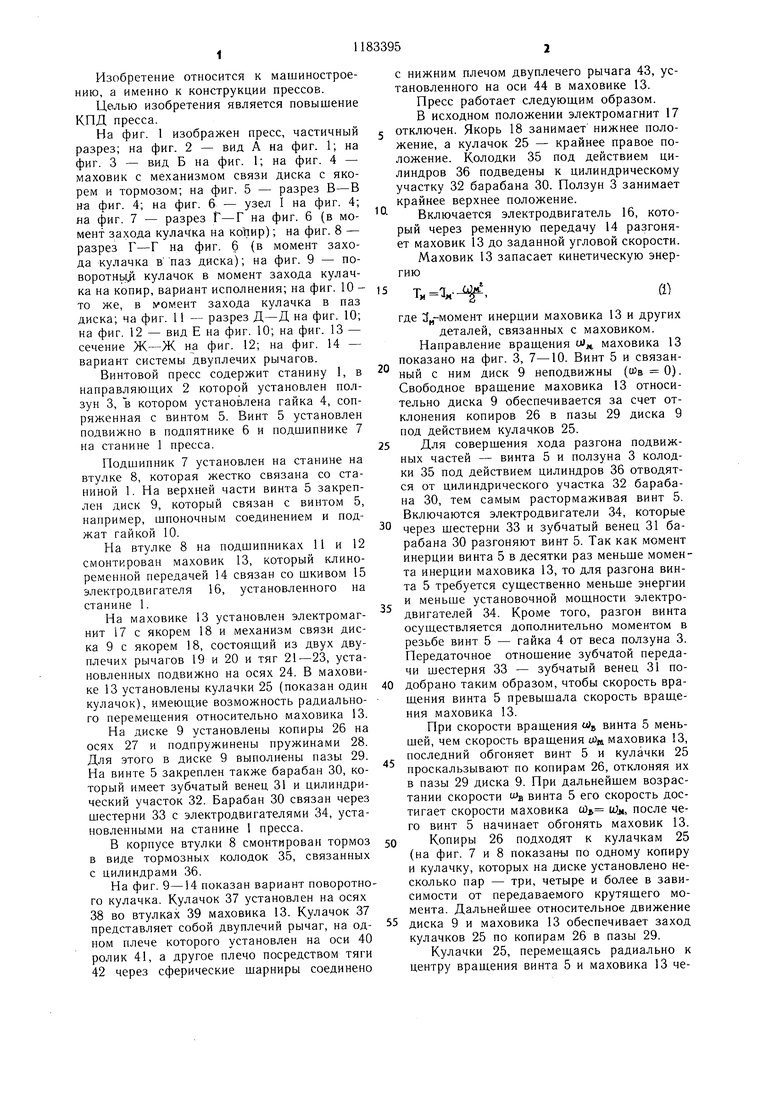
| название | год | авторы | номер документа |
|---|---|---|---|
| Винтовой пресс | 1983 |
|
SU1172745A1 |
| Винтовой пресс | 1987 |
|
SU1497043A1 |
| Винтовой пресс | 1983 |
|
SU1177173A1 |
| Винтовой пресс | 1990 |
|
SU1803335A1 |
| Винтовой пресс | 1989 |
|
SU1646892A1 |
| Привод кривошипного пресса | 1978 |
|
SU753677A1 |
| Винтовой пресс | 1986 |
|
SU1348216A1 |
| Винтовой пресс | 1989 |
|
SU1662868A1 |
| Винтовой пресс | 1987 |
|
SU1489998A1 |
| Винтовой пресс | 1987 |
|
SU1489997A1 |

1. ВИНТОВОЙ ПРЕСС, содержащий смонтированный в направляющих станины ползун с гайкой, сопряженной с винтом, установленным подвижно в подшипнике и подпятнике в станине пресса, маховик, установленный в подщипниках на станине пресса и связанный передачей с электродвигателем, и тормоз с барабаном, установленным на винте, отличающийся тем, что, с целью повышения КПД пресса, он снабжен дополнительными электродвигателями с щестернями, электромагнитом с якорем, установленным на торце маховика, диском с пазами и подпружиненными копирами, а также смонтированным в маховике механизмом связи диска с якорем, барабан выполнен с цилиндрическим участком и зубчатым венцом, при этом тормоз смонтирован в станине с возможностью взаимодействия с цилиндрическим участком барабана, а шестерни дополнительных электродвигателей связаны с его зубчатым венцом. 2. Пресс по п. 1, отличающийся тем, что механизм связи диска с якорем выполнен в виде кулачка и системы двуплечих рычагов и тяг. а ®
.13
JJs
I Ml
i
J
t3
-/ -15
Й
16
Фиг. 5
8
18
и
Г-Г
25 2t
142
из
вид
9 27 f 26
Ж|
Фиг. 12
л-л
Фиг. 11
ж-ж
Фиг. fJ
| ВИНТОВОЙ ПРЕСС | 0 |
|
SU326091A1 |
| Способ обработки медных солей нафтеновых кислот | 1923 |
|
SU30A1 |
