I
Изобретение относится к машиностроению, а именно к промышленным роботам и манипуляторам.
По основному авт.св. № 9753ЭЗ известен схват промьппленного робота, содержащий основной магнит, установленный между участками магнитопровода, соединенными между собой через прокладку из немагнитного материала, корпус, установленный на силовом цилиндре, поршень которого подпружинен к цилиндру и связан с рамкой из немагнитного материала, и дополнительный магнит, установленный в рамке.
В известном охвате промьшшенного робота удерживающее усилие создается только основным магнитом, а дополнительньй магнит используется для отделения детали от схвата.
Цель изобретения - повышение грузоподъемности схвата.
Цель достигается тем, что схват промышленного робота снабжен пластинами из. магнитопроводящего материала, расположенными со стороны полюсов дополнительного магнита на расстоянии от магнитопровода, равном величине хода дополнительного магнита, при этом каждая пластина магнитно связана с противоположно лежащими относительно магнитных осей магнитов участками магнитопровода.
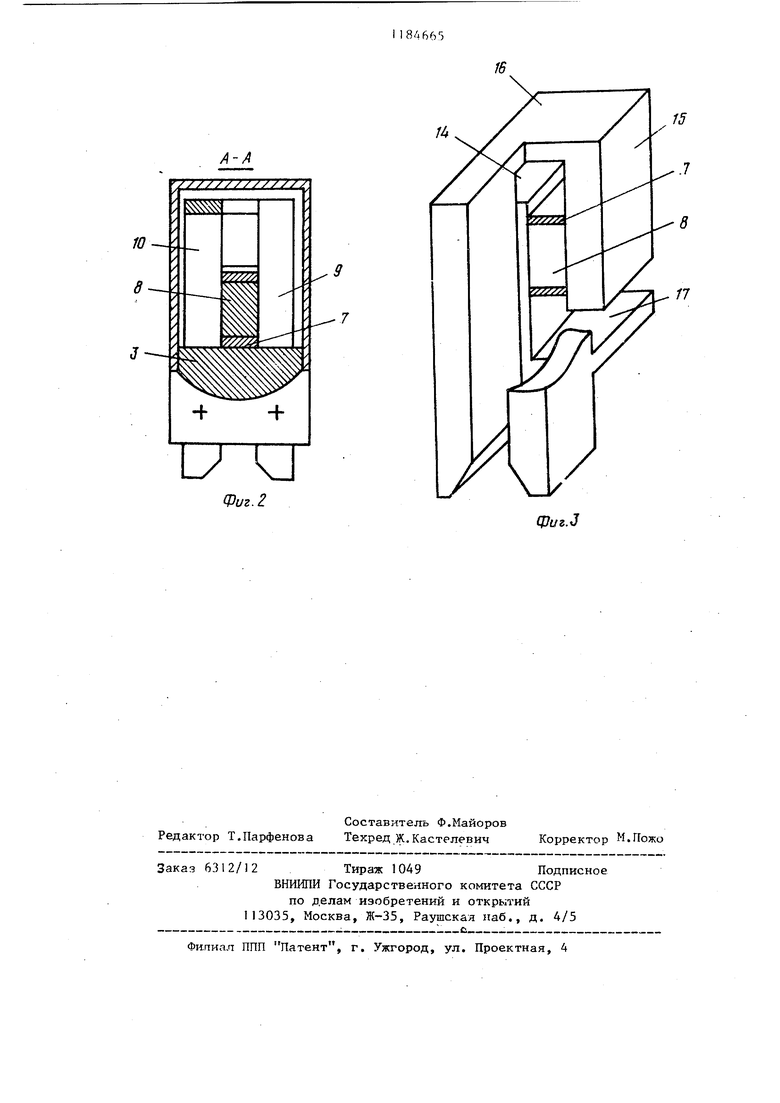
На фиг. 1 изображен схват промышленного робота, общий вид; на фиг.2сечение Л-А на фиг. 1; на фиг. 3 соединение пластин с участками магнитопровода.
Схват промьшшенного робота содержит цилиндр 1, внутри которого находится поршень 2, корпус 3, закрепленный на цилиндре 1. Внутри корпуса 3 помещена возвратная пружина 4, одетая на шток 5, который жестко, скреплен с поршнем 2. Шток 5 посредством шарнира 6 соединен с рамкой 7, выполненной из немагнит46652
кого материала. Внутри рамки 7 закреплен дополнительный магнит 8. Между участками 9 и 10 магнитопровода, соединенными между собой через прокладку 11, выполненную из немагнитного материала, находится основной магнит 12. Наружный кожух 13 изготовлен из алюминия. Внутри кожуха расположены пластины 14 и 15 из маг0 нитопрово/ ящего материала и магнитопроводящие связи 16 и 17.
Схват промышленного робота работает следующим образом.
Захват детали происходит при присутствии энергоносителя в полости цилиндра 1 привода отделения детали. Поршень 2 находится в крайнем левом положении под действием возвратной пружины 4, при этом рамка 7
0 с дополнительным магнитом 8 выведена из зоны действия основного магнита 12 и находится между пластинами 14 и 15. Последние через магнитопроводящие связи 16 и 17 ведут маг5 нитный поток, к участкам 9 и IО
магнитопровода в совпадающей полярности с основным магнитом 12 (где и происходит их суммирование). Суммарный магнитный поток, проГщя по
JJ участкам 9 и 10, замыкается через деталь, и она закрепляется. Для отделения детали от схвата необходимо подать энергоноситель в полость цилиндра 1 привода отделения детали. Поршень 2 под .воздействием энергоносителя, сжимая возвратную пружину 4, занимает крайнее правое положение и, таким образом, рамка 7 с дополнительным магнитом 8 занимает положение между участками 9 и 10 магнитопровода. В этом случае магнитные потоки основного и дополнительного магнитов направлены навстречу друг другу, а суммарный Iмагнитный поток равен нулю и деталь освобождается от гзахвата. Далее цикл повторяется.
А1U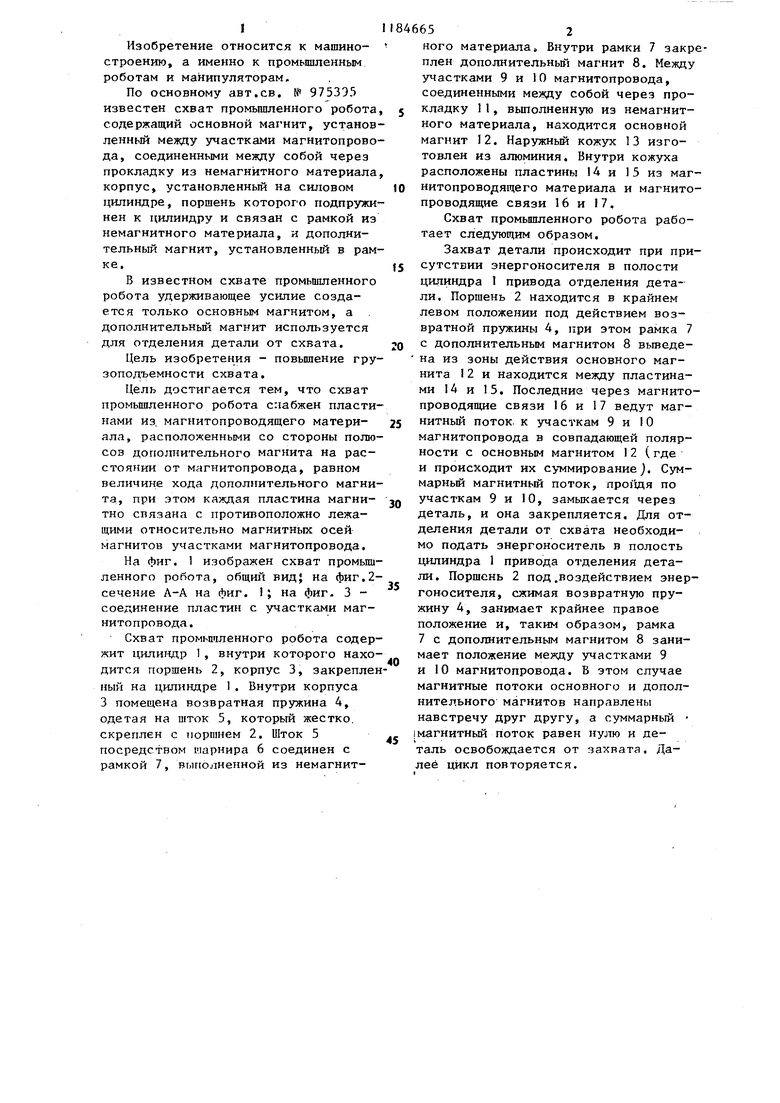
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват промышленного робота | 1981 |
|
SU975395A1 |
| Схват промышленного робота | 1985 |
|
SU1350002A1 |
| Устройство для передачи деталей между прессами | 1980 |
|
SU897351A1 |
| Магнитный схват | 1990 |
|
SU1812103A1 |
| Магнитный схват | 1990 |
|
SU1811484A3 |
| Устройство для передачи деталей между технологическими машинами | 1981 |
|
SU1003974A1 |
| Схват /его варианты/ | 1983 |
|
SU1161374A1 |
| Магнитоэлектрический захват груза | 2022 |
|
RU2797934C1 |
| Схват промышленного робота | 1979 |
|
SU810477A1 |
| Управляемый магнитоэлектрический двигатель | 1983 |
|
SU1120457A2 |
1 . ОХВАТ ИРОМЬПиЛЕННОГО РОБОТА по авт.св. № 975395, отличающийся тем, что, с целью повьшения грузоподъемности, он снабжен пластинами из магнитопроводящего материала, расположенными со стороны полюсов дополнительного магнита на расстоянии от магнитопровода, равном величине хода дополнительно.го магнита, npi: этом каждая пластина магнитно связана с противоположно лежащим относительно магнитных осей магнитов участком магнитопровода. (Л 00 4 Од СП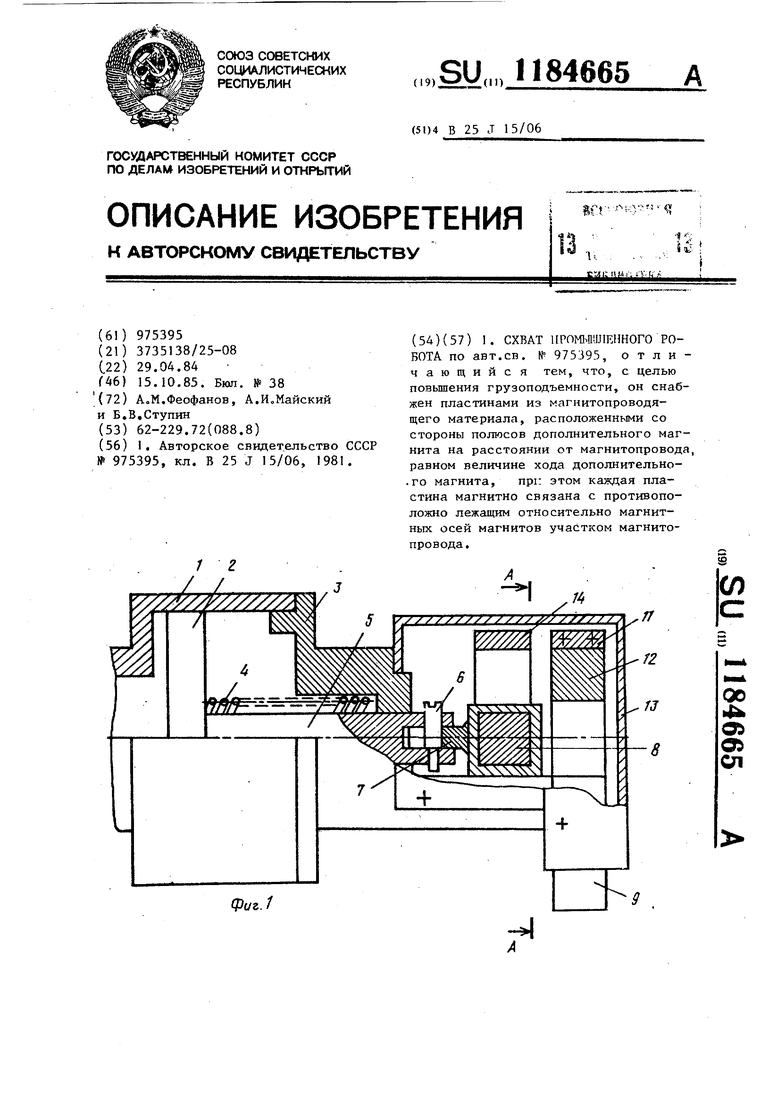
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Схват промышленного робота | 1981 |
|
SU975395A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
