(54) СХВАТ ПРОМЫШШННОГО РОБОТА
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват промышленного робота | 1984 |
|
SU1184665A2 |
| Устройство для передачи деталей между прессами | 1980 |
|
SU897351A1 |
| Схват промышленного робота | 1985 |
|
SU1350002A1 |
| Очувствленный схват промышленного робота | 1988 |
|
SU1593956A1 |
| Устройство для передачи деталей между технологическими машинами | 1981 |
|
SU1003974A1 |
| Схват /его варианты/ | 1983 |
|
SU1161374A1 |
| Схват промышленного робота | 1980 |
|
SU906688A1 |
| Устройство для перемещения материала | 1986 |
|
SU1355331A1 |
| Схват промышленного робота | 1979 |
|
SU810477A1 |
| Схват промышленного робота | 1980 |
|
SU931467A1 |
1
Изобретение относится к машинострое.нию, а именно к промышленным роботам и манипуляторам.
Известен схват промышленного робота, содержащий-магнит, закрепленный на корпусе схвата, и устройство для отделения деталей, имеющее силовой цилиндр 1 .
Недостатком этого схвата является его Heaa/iejKtiocTb в работе в связи с возможностью зависания детали на краю магнита, а также из-са возможности перекоса детали при попадании ферромагнитной : стружки между плоскостями магнита и детали, кроме этого, этот схват содержит
сложную конструкцию куСТрОЙСТВа для OTVделения деталей.
Цель, изобретения - повышение надеж-.. ности схвата и упрощение конструкции.
Эта цель достигается тем, что устройство для отделения деталей снабжено дополнительным магнитом и рамкой, выполненной из немагнитного материала и связанной шарнирно со штоком силового ципиндра, причем основной и дополнительный
магниты размещены в магнитопроводе разноименными полюсами друг к другу, и, кроме того, дополнительный магнит расположен в рамке.
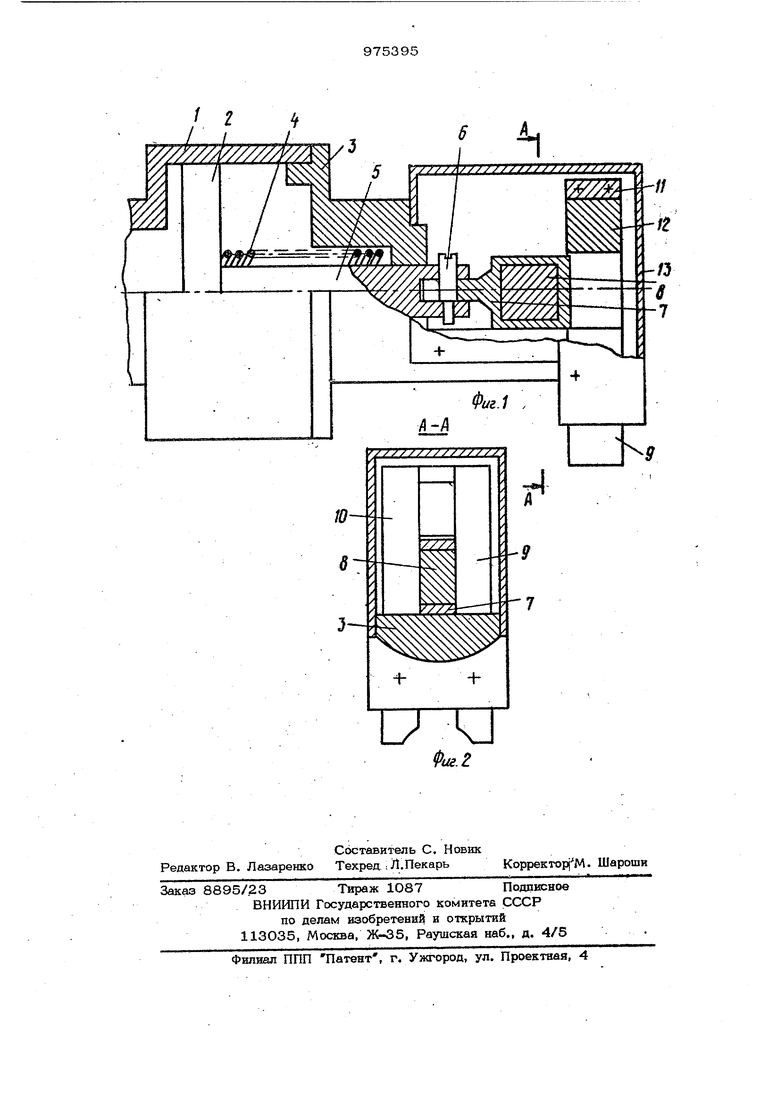
На фиг. 1 изображен схват промьппленного робота, общий вид; на фиг. 2 - сечение А-А на фиг. 1.
Схват промьшшенного робота содержит цилиндр 1, внутри которого находится
to поршень 2, корпус 3, закрепленный на дилиндре 1. Внутри корпуса 3 помещена возвратная пружина 4, одетая на щток 5, который жестко закреплен с поршнем 2. Шток 5 посредством шарнира 6 соединен
15 с рамкой 7, вьшолненной из немагнитного материала, например из бронзы. Внутри рамки 7 закреплен дополнительный магнит 8. Между магнитопроводами 9 и 10, соединенных между собой через -про20кладку 11, выполненную из немагнитного материала, например из бронзы, находит ся основной магнит 12. Наружный кожух 13 изготовлен из алюминия.
Схват промьпиленного1 робота работает следующим образом.
Захват детапи происходитiпри отсутствии энергоносителя в полости ципиндра 1 привода отделения детали. Поршень 2 будет находиться в крайнем левом положении под действием возвратной пружины 4, при этом .рамка 7 с дополнительным магmiTOM 8 будет вьтедена из зоны действия основного магнита 12. Магнитный поток основного магнита 12, пройдя по магинтопровЬдам 9 и 10, замкнется че рез деталь и она будет закреплена. Для отделения детали от охвата промышпенно- го робота необходимо подать энергоноснтель в полость цилиндра 1привода отделения детали. Поршень 2 под действием/ энергоносителя, сжимая возвратную пружи ну 4, займет крайнее ЙравобПположение и, таким образом, рамка 7 с дополнительным магнитом 8 займет положение между магнитопроводами 9 и 10. Магнитные истоки основного и дополнительного магнитов, направленные Навстречу друг другу, взаимно компенсируются, таким образом, суммарный магнитный поток будет равен ну лю, а деталь освободится от захвата,
Наличие функционально-расширенного и надежного устройства для отделения деталей в предлагаемом схвате расширяет сферу его применения и позволяет устра нить расходы на разработку и совершенствования ряда схватов, необходимьк для обработки деталей различных форм, что даст экономию в народном хозяйстве, а также позволяет сократить время общего
аикла обработки деталей за счет исключения из него времени, необходимого для смены схватов, что дает экономию энергоресурсов.
Наличие надежного и простого устройства для отделения деталей в предлагаемом схвате для промышленного робота, кроме того, увеличивает надежность и бесперебойность работы самого промышленного робота.
Формула изобретения
Схват промышленного робота, содержащий основной магнит, жестко закрепленный на корпусе, магнитопровод и устройство для отделения деталей, имеющее си- лово шшиндр, отличающийся тем, что, с целью повьпиения надежности в работе путем обеспечения надежности отделения деталей, а также упрощения конструкции, устройство для отделения деталей снабжено дополнительным магнитом и рамкой, выполненной из немаг нитного материала и связанной шарнирно со штоком силового цилиндра, причем основной и дополнительный магниты разме шены в магнитопроводе разноименными полюсами друг к другу и, кроме того, дополнительный магнит расположен в рамке.
Источники информации, принятые во внимание при экспертизе.
